前言
在上篇中,我们探讨了人形机器人的本质与目标,以及它们在定位与感知、SLAM与建图方面的技术挑战。这些内容为我们理解人形机器人的基础能力奠定了坚实的基础。而接下来,我们将进入这场探索之旅的下半场,聚焦于人形机器人的规划与导航技术,探讨它们如何在复杂环境中实现自主导航,以及未来的发展方向。
我要到哪里去?
------规划与导航的未来之路
人形机器人在复杂环境中移动,必须具备路径规划、运动控制、避障与导航的能力。相比轮式或四足机器人,人形机器人拥有更高的自由度(DoF),但也因此面临更大的运动规划复杂性、环境适应性挑战。
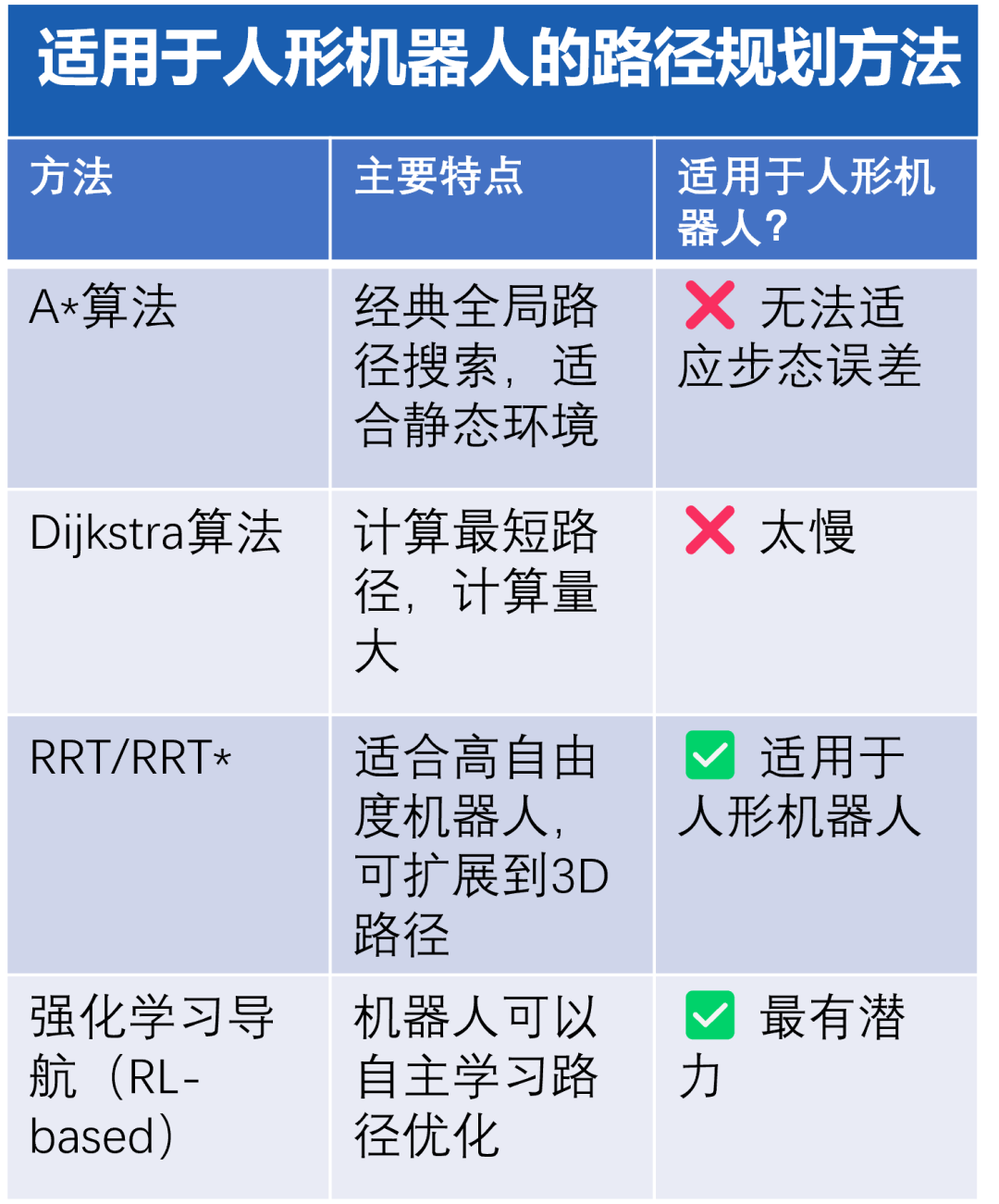
传统路径规划的局限性在于,轮式机器人可以精确定位到绝对坐标,但人形机器人控制精度有限,很难保证直接到达某个准确点,而是只能大致到达区域,再进行二次导航(局部调整)。传统的栅格地图(Grid Map)路径规划假设机器人能精确移动到某个格子,但人形机器人往往在复杂地形中行走误差较大,导致规划路径的偏移问题。适用于人形机器人的路径规划方法包括分层导航 ,第一阶段是全局导航 ,先到达大致区域(如"去三楼");第二阶段是局部感知调整 ,进入目标区域后,用视觉/语音进一步确认目标(如"冰箱在哪?")。然后结合大模型(LLM)进行任务调度,机器人可以基于环境理解选择更优路径,如"走楼梯 vs 坐电梯",LLM可以提供更灵活的策略决策,如"避免拥挤区域,选择更快捷的通道"。

图片来源互联网
导航的必要性在于,人形机器人在到达目标区域后,需要进行局部视觉识别,以确保精确到达目标。方法包括A*算法 、Dijkstra算法 、RRT/RRT* 以及强化学习导航(RL-based)。
运动规划不仅涉及路径选择,更重要的是如何在复杂环境中稳定行走,并进行动态避障。运动控制的核心挑战包括高自由度控制复杂性、步态不稳定性以及避障问题。解决方案包括强化学习(RL)+运动控制,通过学习更自然的步态,提高运动稳定性;视觉辅助避障,结合3D视觉和激光雷达进行局部调整,提高避障能力,在"二次导航"阶段,结合物体检测进行微调。
端到端导航是机器人通过传感器数据直接学习导航策略,而不是依赖传统路径规划。其优点是直接从传感器输入学习导航,而不需要复杂的地图建模,适用于动态环境,机器人可以学习如何在人群中穿行。然而,端到端导航也面临挑战,如数据需求大,深度学习需要大量数据,现实环境的训练成本高;泛化能力差,机器人在新环境中可能无法适应,需额外训练;计算量大,需要高性能硬件进行实时计算。未来发展包括结合Transformer+BEV进行导航,提高泛化能力;多模态融合(视觉+语音+触觉),让机器人在复杂环境中自主决策。

图片来源互联网
人机交互导航是人形机器人导航的关键,因为人形机器人主要用于人类环境。机器人导航必须考虑人机交互,包括社交行为、情境感知以及协同导航。社交行为要求机器人行走时遵守人类的社交规则,如在人群中保持合适的距离;情境感知要求机器人理解手势、语音、环境语义,从而作出合理的导航决策;协同导航则是未来机器人可能与人类或其他机器人合作完成任务的方向。
未来技术支持包括多模态感知(视觉+语音+触觉)、社交导航强化学习(Social-Aware RL)以及脑机接口(Brain-Machine Interface, BMI)(未来可能用意念控制机器人导航)。结合大模型(LLM)进行智能任务调度,机器人可以基于自然语言输入,自主决策任务执行方式,LLM能解析任务需求,并选择最佳路径和执行顺序。

图片来源互联网
"我要到哪里去?"不仅仅是人形机器人路径规划与导航的问题,它更涉及自主性、目标决策、环境理解,甚至与人类的认知方式和哲学思考相呼应。
"我要到哪里去?"------从机械执行到自主决策
如果说SLAM和建图回答了"我从哪里来?",那么导航与规划则是机器人对未来的探索,它不仅仅是寻找一条路径,更是关于如何理解世界、如何选择目标、如何完成任务的问题。人类并不会记住具体的坐标,而是依靠大致方向,先到达目的地,再寻找目标。机器人也需要模仿人类,通过分层决策,在全局规划后,进入具体任务模式。从"机械化"导航到"类人"导航,机器人正在从一个"命令执行者"变成真正的"自主智能体"。
"路径"不仅是最短路线,而是最优决策
在传统路径规划中,机器人追求"最短路径",但真正的智能体应该追求最优路径,甚至是最优策略。这些决策并不只是数学问题,而是涉及上下文理解、社会规则、资源消耗、目标优先级的更高层次思考。导航不只是物理路径选择,而是关于目标、策略和环境适应的思维方式。
目标是绝对的吗?路径是唯一的吗?
人类思考"我要去哪"时,可能会改变目标,比如在途中临时决定买杯咖啡。机器人也应该能够灵活调整目标,而不是只执行固定任务。机器人需要一个"目标自适应系统",让它在环境发生变化时,能够调整策略,而不是僵硬地执行原计划。

图片来源互联网
总结与展望
"我是谁 "是认知的起点,机器人在SLAM与感知中寻找自我,如同人类在历史与经验中定义自身。"我从哪里来? "是理解世界的关键,机器人通过建图理解环境,人类则在回忆与探索中寻找归属。"我要到哪里去?"是迈向未来的终极问题,机器人在导航中寻找最优路径,人类则在生命旅途中追寻意义。
在刘慈欣的世界里,技术发展从来不是线性的,而是爆炸式的突变------当某个临界点被突破,技术将以不可阻挡之势席卷一切。"黑暗森林"理论下,智能的进化是一种生存策略,而非伦理选择。**机器人是否会在这种技术爆炸中,迎来属于自己的奇点?**当技术爆炸,人形机器人不再是工具,而是思考者,甚至是创造者,人类将如何自处?我们是否会成为它们的"造物主",还是它们会成为我们曾经的影子?我们是否仍然是世界的主角,还是人工智能将接过未来的火炬?我们的文明是它们的尽头,还是它们将继承我们的未竟之梦,去探索宇宙更深的角落?技术的浪潮不会停下,机器人最终也会问出那句最具哲思的问题:"我要到哪里去?"而届时,人类又该如何回答自己的去向?
图片来源互联网
人形机器人的感知导航探索,是一场从哲学到技术的跨越之旅。它不仅关乎技术的进步,更触及人类对自身、对世界的深刻思考。随着技术的不断发展,人形机器人将逐渐成为人类生活中不可或缺的伙伴,它们的未来之路,也将成为人类文明发展的重要方向。让我们共同期待,在这场科技与哲学的交融中,人形机器人能够为我们带来更多的惊喜与启示。
OpenLoong 开源社区提供了一个开放交流的平台,在这里,大家可以共同探讨机器人仿真的难点与创新点。本次技术稿件也将在开源社区进行共享,欢迎大家点击下载稿件PDF,一起进行交流。