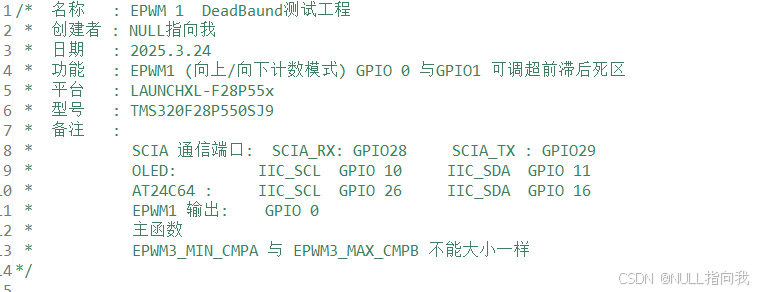
今日更改配置EPWM1的GPIO 0和GPIO 1可调节死区:
文章提供完整工程下载、测试效果图
目录
我的单片机平台是这个:

EPWM1初始化带死区:
cppUint16 EPwm1_DB_Direction; //EPWM_INFO epwm3_info; // 向上向下计数 周期 = TBCLK / (TBCRD*2) // 本初始化最终算得周期为 50kHz void Init_Epwm1(void)//GPIO 0 GPIO 1 { EALLOW; CpuSysRegs.PCLKCR2.bit.EPWM1=1; //使能EPWM1 PieVectTable.EPWM1_TZ_INT = &epwm1_tzint_isr; //初始化EPWM引脚 GpioCtrlRegs.GPAPUD.bit.GPIO0 = 1; // Disable pull-up on GPIO0 (EPWM1A) GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1; // Configure GPIO0 as EPWM1A GpioCtrlRegs.GPAPUD.bit.GPIO1 = 1; // Disable pull-up on GPIO1 (EPWM2A) GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1; // Configure GPIO1 as EPWM1B EDIS; EALLOW; CpuSysRegs.PCLKCR0.bit.TBCLKSYNC =0; EDIS; // EALLOW; // //选择触发器 功能 // EPwm1Regs.TZSEL.bit.OSHT1 = 1; // // Set TZA 当触发器条件满足时相关的输出强制为高电平 // EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_HI; // // // Enable TZ interrupt // EPwm1Regs.TZEINT.bit.OST = 1; // EDIS; EPwm1Regs.TBPRD = 6000; // Set timer period EPwm1Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0 EPwm1Regs.TBCTR = 0x0000; // Clear counter // // Setup TBCLK // EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV4; // Clock ratio to SYSCLKOUT EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV4; EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // Load registers every ZERO EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW; EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // // Setup compare // EPwm1Regs.CMPA.bit.CMPA = 3000; // // Set actions // EPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM1A on Zero EPwm1Regs.AQCTLA.bit.CAD = AQ_CLEAR; EPwm1Regs.AQCTLB.bit.CAU = AQ_CLEAR; // Set PWM1A on Zero EPwm1Regs.AQCTLB.bit.CAD = AQ_SET; // // Active Low PWMs - Setup Deadband // EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_LO; EPwm1Regs.DBCTL.bit.IN_MODE = DBA_ALL; EPwm1Regs.DBRED.bit.DBRED = 0; EPwm1Regs.DBFED.bit.DBFED = 0; EPwm1_DB_Direction = 1; // // Interrupt where we will change the Deadband // EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // Select INT on Zero event EPwm1Regs.ETSEL.bit.INTEN = 1; // Enable INT EPwm1Regs.ETPS.bit.INTPRD = ET_3RD; // Generate INT on 3rd event EALLOW; CpuSysRegs.PCLKCR0.bit.TBCLKSYNC =1; EDIS; IER |= M_INT2; PieCtrlRegs.PIEIER2.bit.INTx1 = 1; }
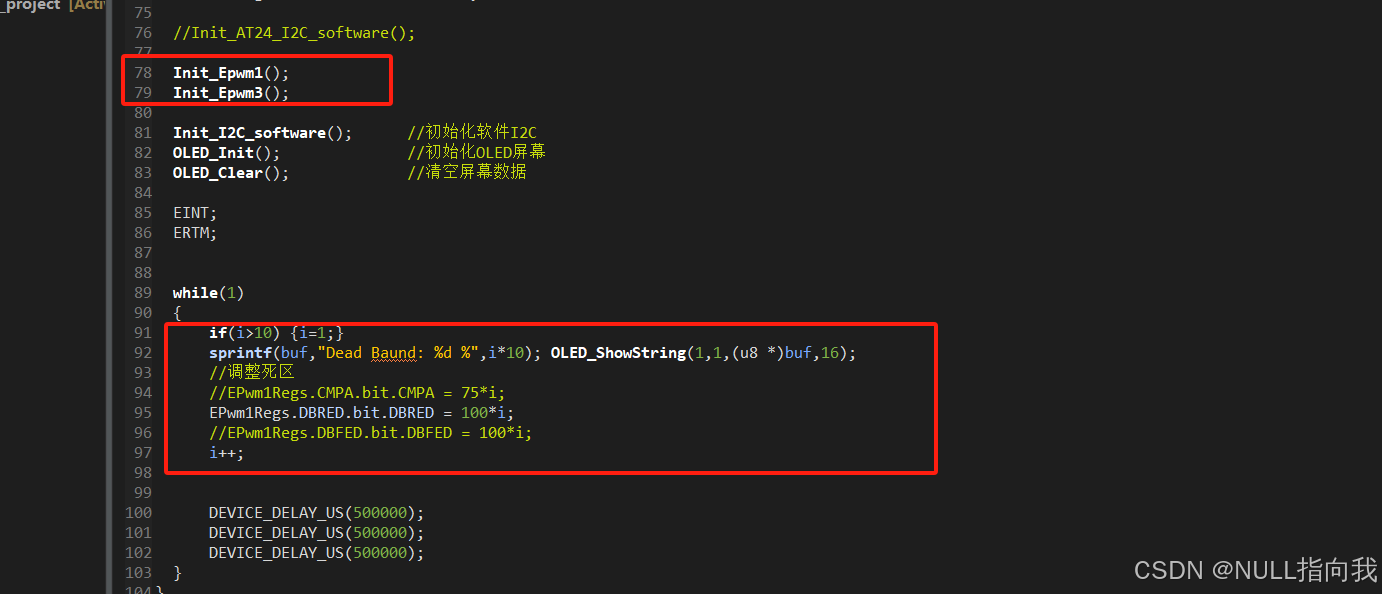
主函数调用:
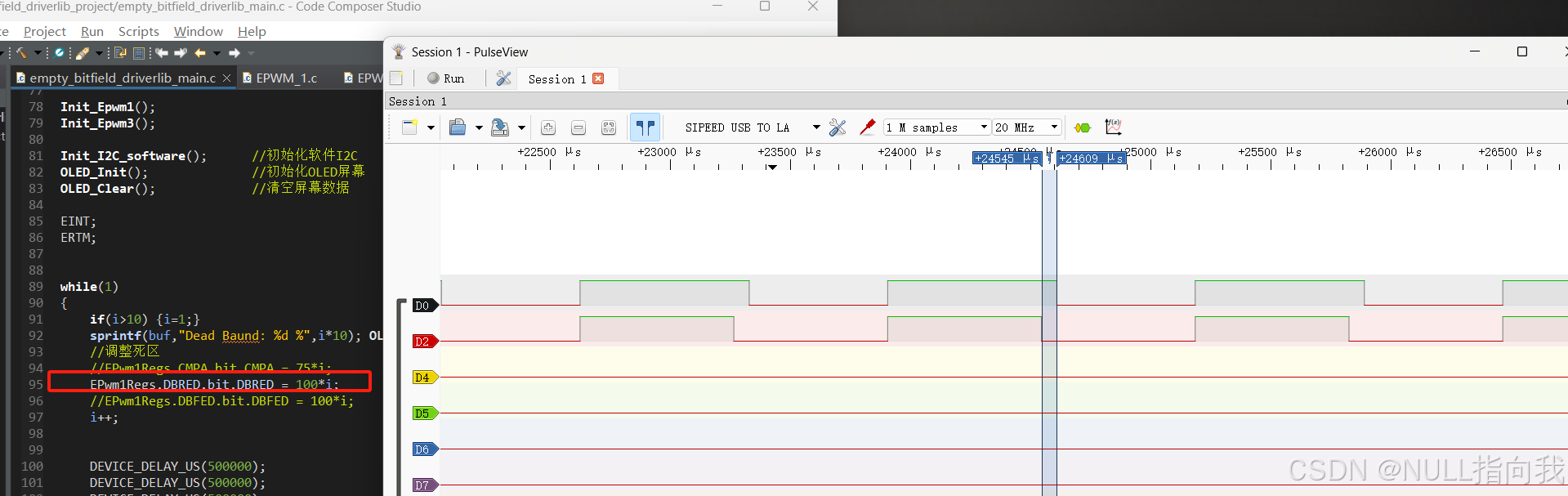
测试效果截图:
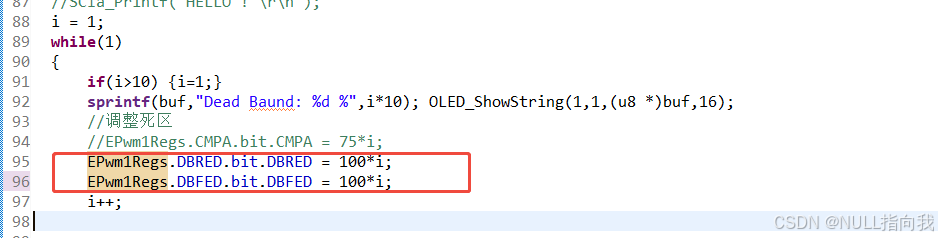
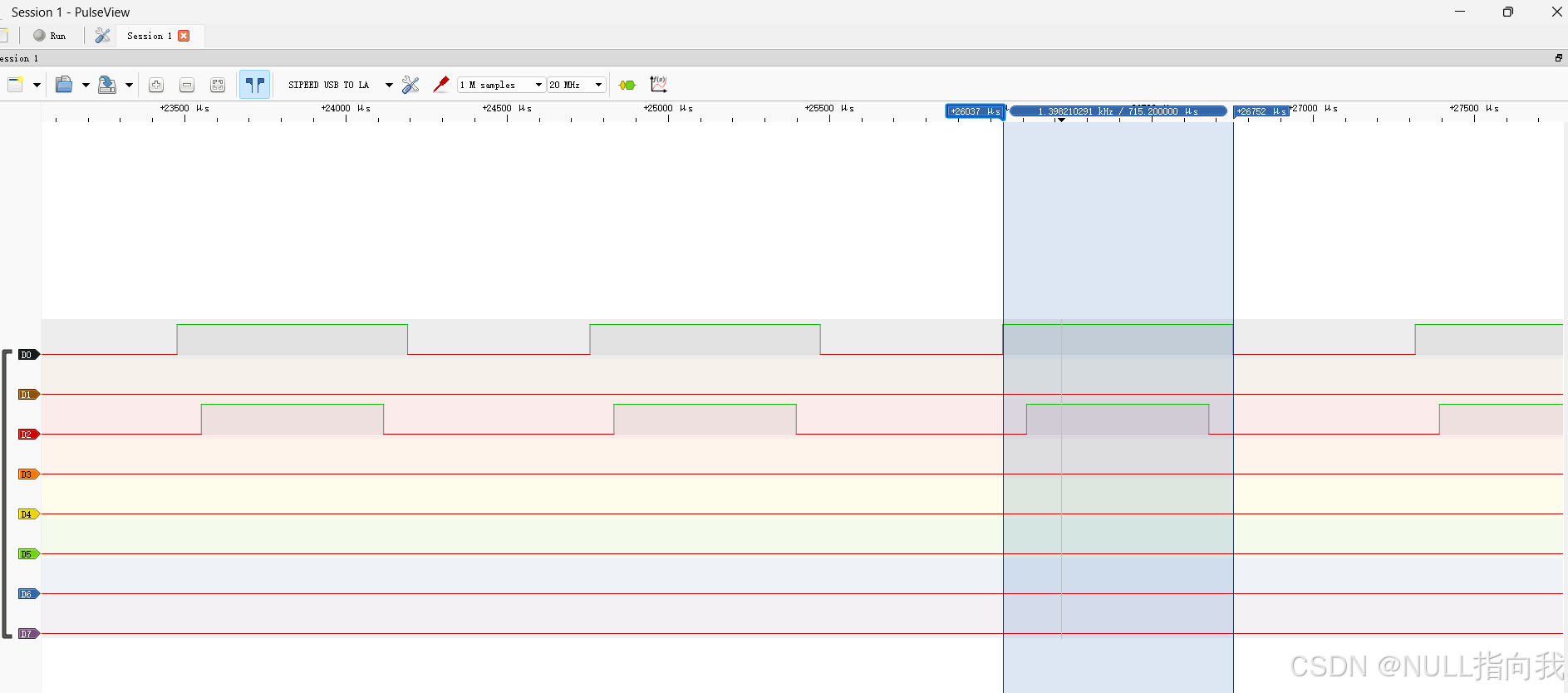
这幅图是同时设置超前与滞后死区:
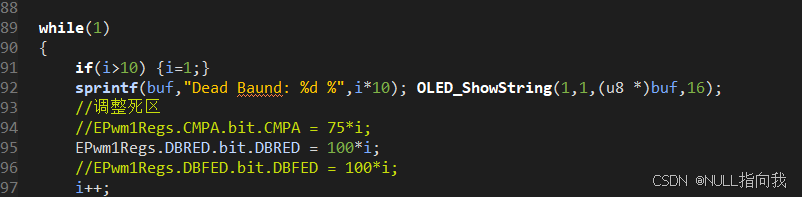
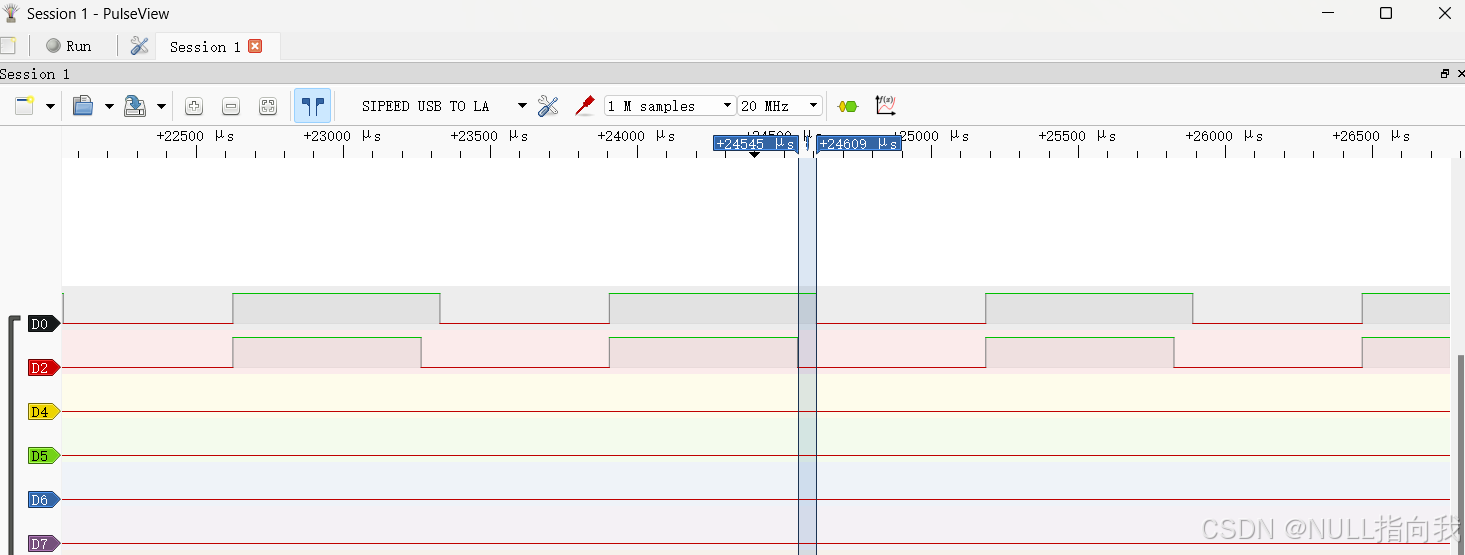
这里可以看到只有设定DBFED 时是滞后带死区: