一、Introduction
传统的无人驾驶采用了区分子模块的设计,即将无人驾驶拆分为感知规划控制三个模块,这虽然能够让无人驾驶以一个很清晰的结构实现,但是感知的结果在传达到规划部分的时候,会导致部分信息丢失,这势必会让很多关键信息无法传递到规划部分,限制整体的算法运行。端到端的无人驾驶则是将感知、预测和规划整合为一个整体,并以规划为任务的核心。在这篇出名的无人驾驶论文中,作者将无人驾驶分为了五个关键的子任务,作者讨论了对于一个端到端的无人驾驶任务来说,究竟哪个模块是必须保留的,而哪些模块是可有可无的。
二、Methodology
Overview
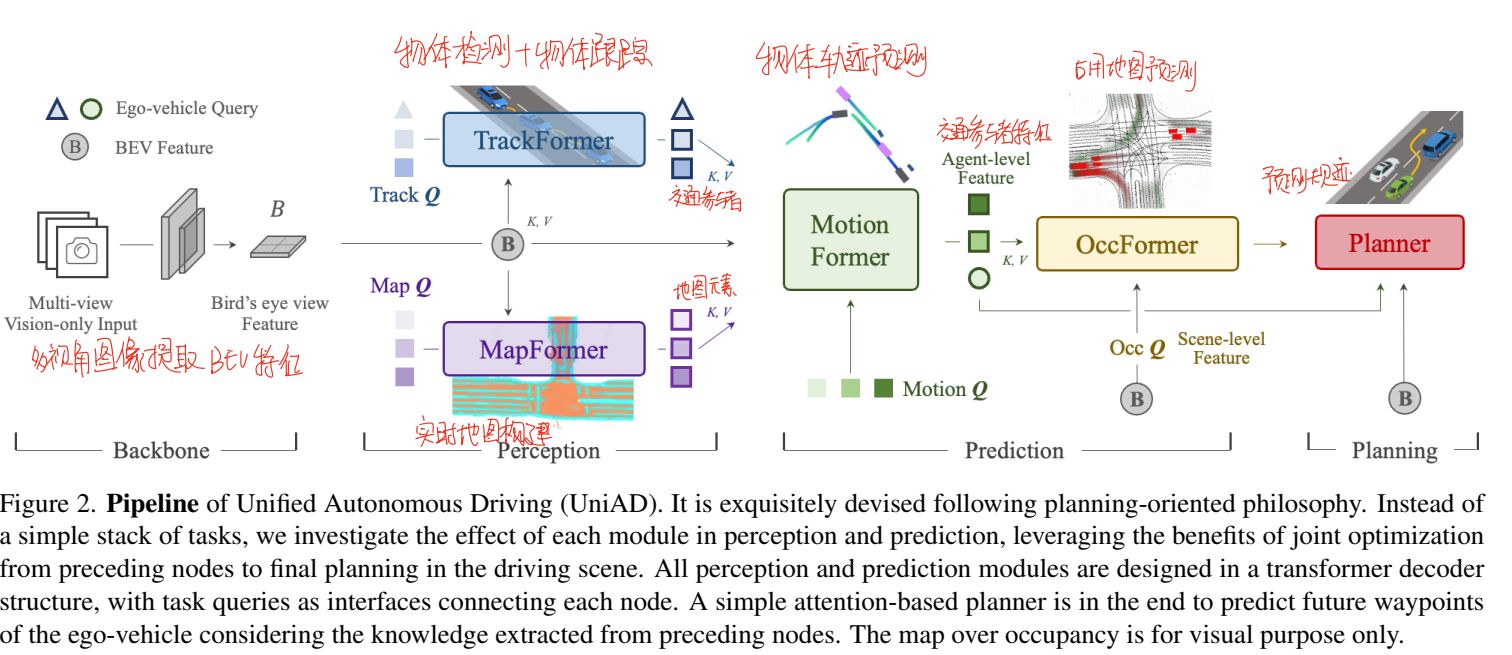
UniAD采用的是基于Transformer的结构,整个框架基于Transformer设计了四个子模块以及一个预测模块。输入的环视图像首先使用BEVFormer转换为BEV特征,后续的所有任务都基于这个BEV视角。作者特地提到,这里并不对使用的BEV模块做限制,任何一个能够完成BEV特征提取的模型都可以用在这里,作者在UniAD中使用的框架叫BEVFormer,也是一个基于Transformer的模型。转换为BEV特征后,首先使用两个特征提取的模块TrackFormer和MapFormer分别提取场景中的agent信息和地图信息,之后使用这两个信息在MotionFormer里面进行预测,得到未来的轨迹信息,这些轨迹信息在OccFormer里面转换为未来时刻场景中占用的预测,最后在Planner的部分完成轨迹的生成和优化。