0.前言
上一篇番外文章教大家如何在宇树机器狗go2的gazebo仿真环境中实现简单的导航运动,本期文章会教大家如何让宇树的机器狗go2在仿真环境中进行slam建图时经常会遇到的一些点云格式,在后续的slam建图和slam算法解析的时候会经常与这些点云信息打交道。宇树机器狗go2仿真会作为一个长期项目来进行不定期更新,仿真不只限于在gazebo上实现,后面还会在isaac sim等仿真平台上教大家如何搭建,其目的还是帮助各位都能以较低的成本加入到宇树机器狗go2的学习中。gazebo的仿真对电脑的需求会低于isaac sim等仿真平台,这对实验条件要求会低很多,更很适合学校小实验室或个人进行仿真实验。
同时我也希望能有更多的开发者加入近来一起完成机器狗go2的仿真实验项目的建设,如有更好的方案和建议可以私聊或申请共创作者。
1.ros PointClould点云格式
宇树机器狗go2配上livox的mid360进行gazebo仿真使用的就是ros PointClould点云格式(livox官方gazebo仿真功能包给的是ros PointClould点云格式,但可通过修改点云属性文件livox_points_plugin.cpp来将PointCloud点云):
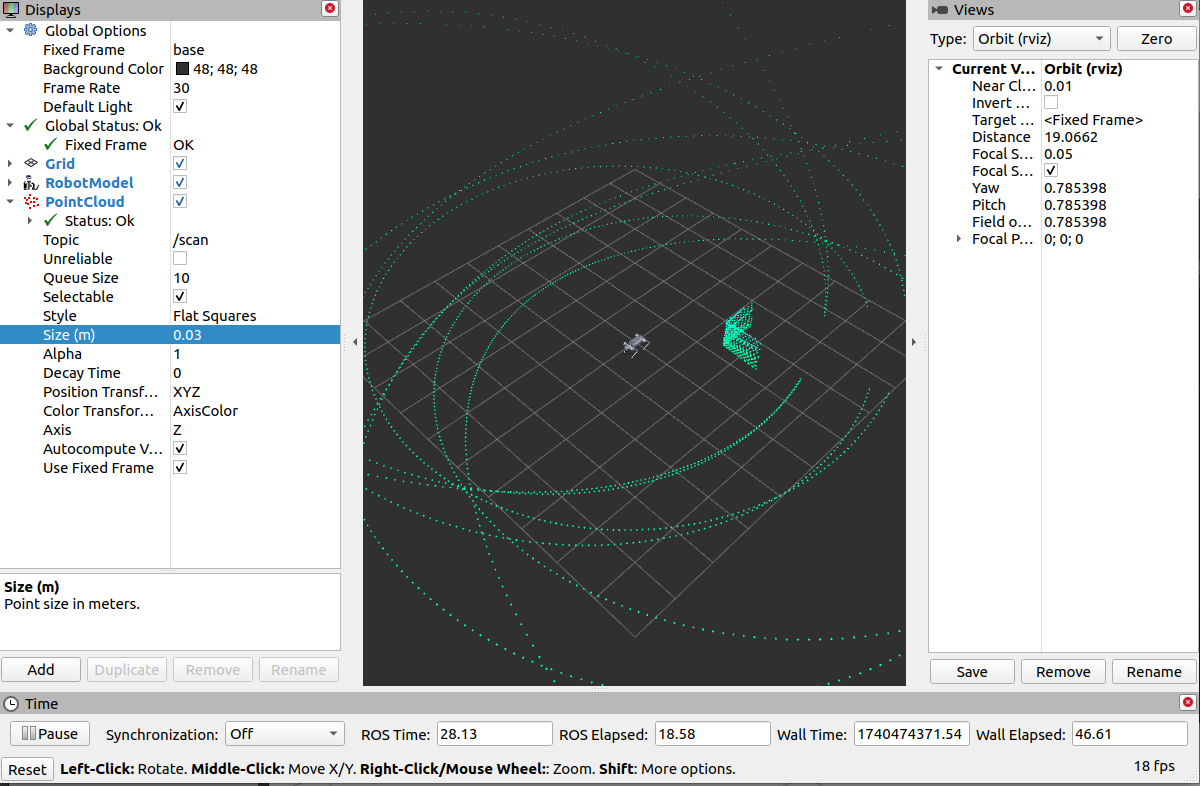
使用rostopic命令会在终端中打印出话题的消息类型、发布者和接收者。
rostopic info /scan 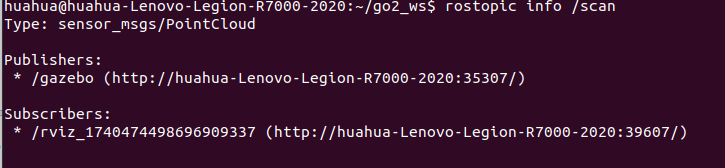
ros PointClould的点云消息格式如下:sensor_msgs /PointCloud Message
std_msgs/Header header
geometry_msgs/Point32[] points
sensor_msgs/ChannelFloat32[] channels- header:类型为 Header,包含了消息的元数据,如时间戳(stamp)、坐标系(frame_id)等。时间戳可用于确定数据采集的时间,坐标系则表明这些点云数据所在的参考系。
- points:类型为 geometry_msgs/Point32\[\],是一个三维点的数组。每个 Point32 包含三个浮点型字段 x、y、z,分别表示点在三维空间中的坐标。
- channels:类型为 sensor_msgs/ChannelFloat32\[\],用于存储额外的属性信息。每个 ChannelFloat32 包含一个字符串 name 用于标识该通道的含义,以及一个浮点型数组 values 存储对应的值。例如,可以用一个通道存储点的强度信息,另一个通道存储点的颜色信息等。
2.ros PointClould2点云格式
宇树机器狗go2配上velodyne的vlp16进行gazebo仿真使用的就是ros PointClould2点云格式:
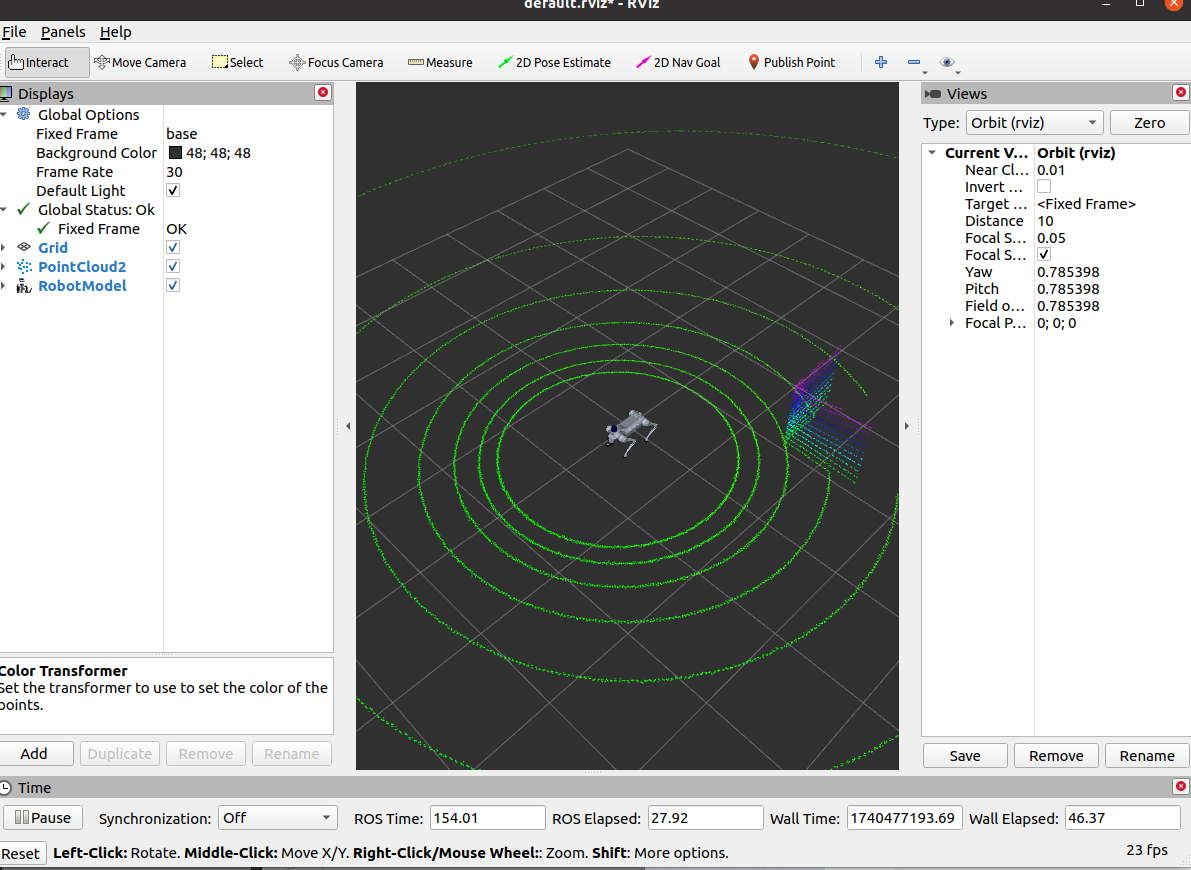
使用rostopic命令会在终端中打印出话题的消息类型、发布者和接收者。
rostopic info /velodyne_points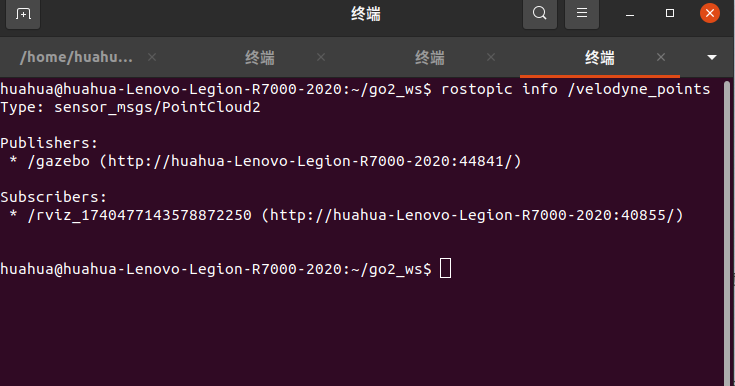
ros PointClould2的点云消息格式如下:sensor_msgs /PointCloud2 Message
std_msgs/Header header
uint32 height
uint32 width
sensor_msgs/PointField[] fields
bool is_bigendian
uint32 point_step
uint32 row_step
uint8[] data
bool is_dense- header:
Header类型,包含时间戳和坐标系等元数据。 - height 和 width:
height和width用于描述点云的二维结构。如果点云是无序的,height通常为 1,width表示点的数量;如果点云是有序的(如立体相机采集的深度图),则height和width分别表示点云的行数和列数。 - fields:类型为
sensor_msgs/PointField[],描述了点云中每个点的字段信息。每个PointField包含字段的名称(如x、y、z、intensity等)、偏移量(表示该字段在数据中的起始位置)、数据类型(如FLOAT32、UINT8等)和计数(通常为 1)。 - is_bigendian:布尔类型,指示数据是否采用大端字节序。
- point_step:无符号 32 位整数,表示每个点在数据缓冲区中占用的字节数。
- row_step:无符号 32 位整数,表示每行点在数据缓冲区中占用的字节数。
- data:无符号 8 位整数数组,存储了实际的点云数据。数据按照
fields中定义的字段顺序和point_step、row_step的规则排列。 - is_dense:布尔类型,指示点云中是否包含无效点(如 NaN 或 Inf)。如果为
true,则表示点云中所有点都是有效的。
3.ros PointClould点云格式与ros PointClould2点云格式的区别
点击宇树机器狗go2---slam建图(1)点云格式查看全文