先决条件
需要在衡石系统认证方式中配置好飞书认证方式,具体步骤详见认证方式中关于飞书的部分。先完成这部分配置后,再进行以下步骤。
飞书中创建机器人应用
1. 创建飞书应用
在飞书企业自建应用管理中创建应用,设置logo,名称,描述等信息,点击"创建"完成创建。

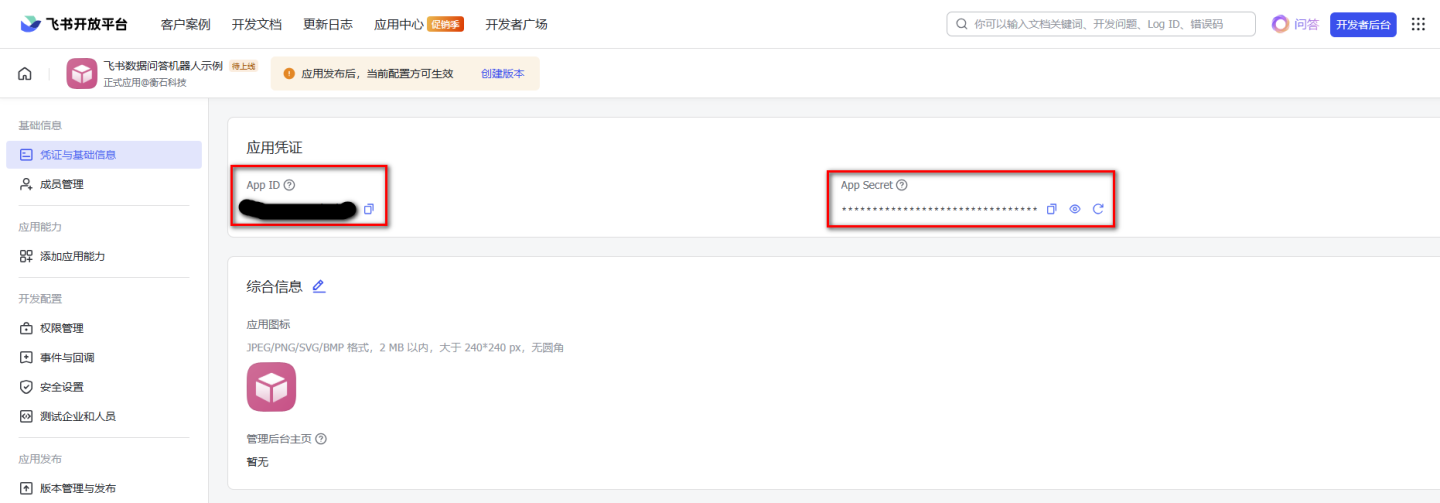
2. 获取飞书 App ID,App Secret 等信息
在刚创建的飞书应用设置页面"凭证与基础信息"部分,复制 App ID,App Secret 信息并保存起来,后续需要在衡石系统中设置问答机器人中用到。
3. 添加飞书应用机器人能力
在刚创建的飞书应用设置页面"添加应用能力"部分,添加"机器人"能力。

4. 添加飞书权限
在刚创建的飞书应用设置页面"权限管理"部分,添加权限,需要的权限列表见下表。

数据问答机器人飞书需要权限一览表:
| 权限名称 | code | 说明 |
|---|---|---|
| 获取用户 user ID | contact:user.employee_id:readonly | |
| 接收群聊中@机器人消息事件 | im:message.group_at_msg:readonly | |
| 读取用户发给机器人的单聊消息 | im:message.p2p_msg:readonly | |
| 以应用的身份发消息 | im:message:send_as_bot | |
| 获取与上传图片或文件资源 | im:resource |
可在飞书权限配置中搜索下面 code 快速开通需要的权限:
basic
contact:user.employee_id:readonly,im:message.group_at_msg:readonly,im:message.p2p_msg:readonly,im:message:send_as_bot,im:resource衡石系统中配置机器人
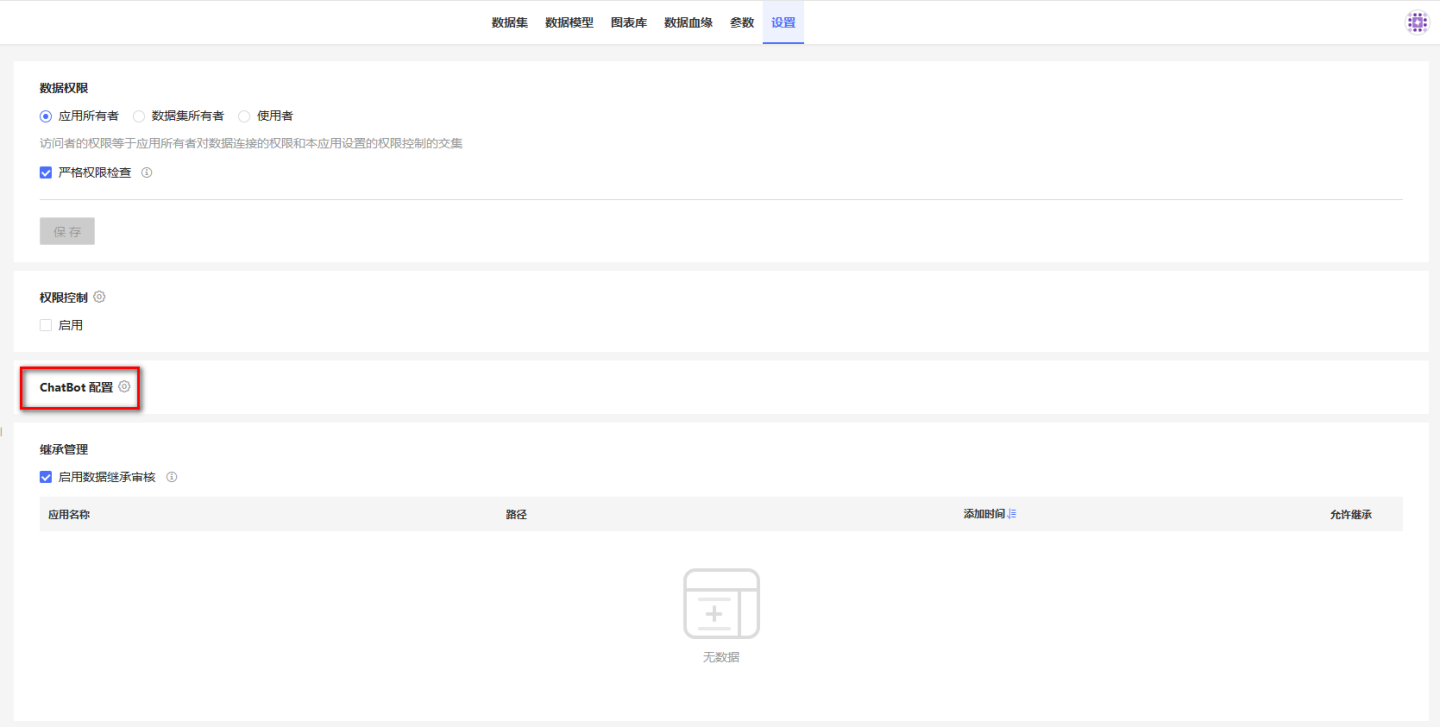
1. 配置数据包和机器人信息
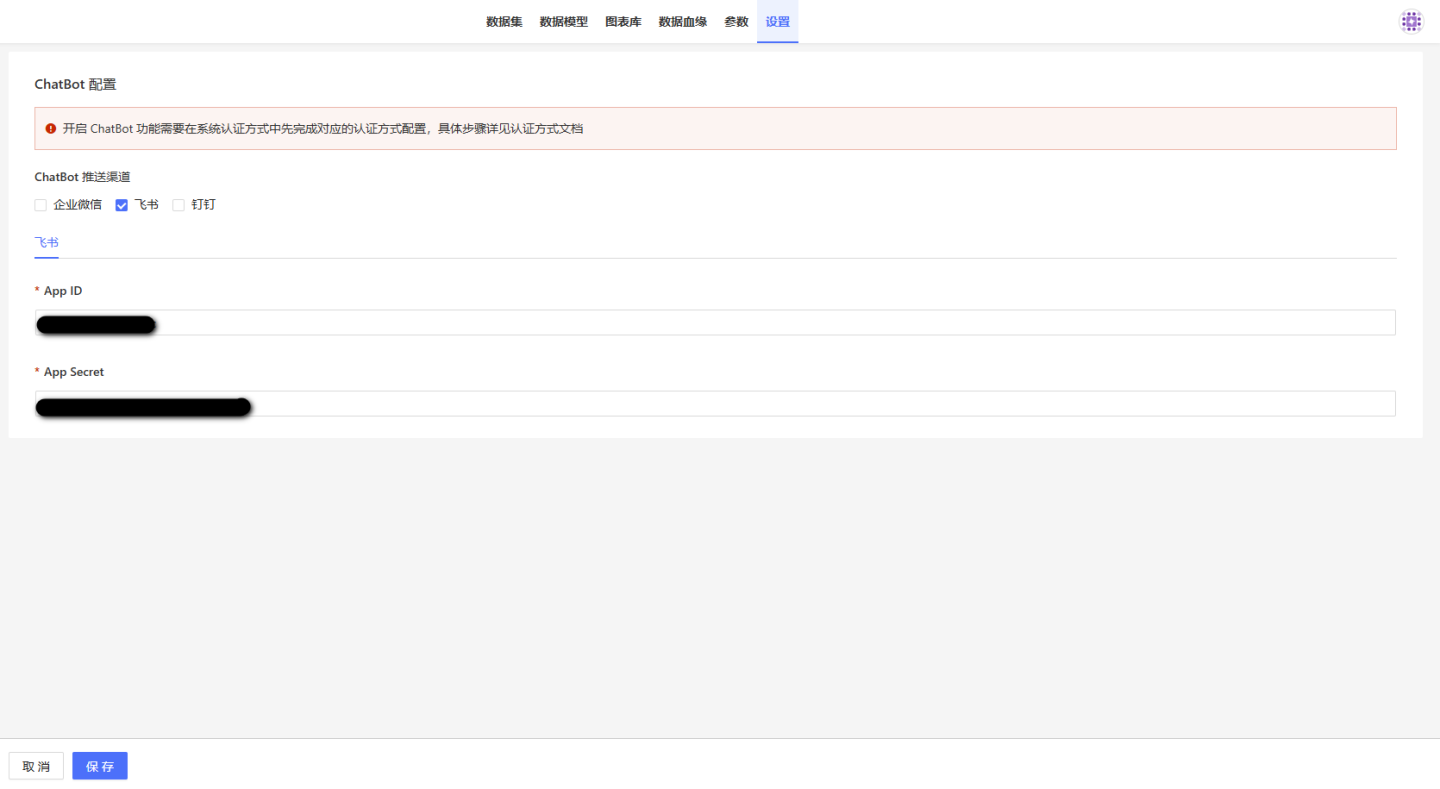
上面我们已经获取了 App ID,App Secret 等信息,这些信息需要配置到衡石系统中,并绑定到衡石的数据包。在数据包的设置页面的机器人设置中,勾选 飞书,填上 App ID,App Secret 信息到相应字段中并保存。
选定数据包后,数据包下所有数据集都被绑定,回答用户问题所需的数据就是在这些数据集中查询的。 注意,需要根据衡石 ChatBI中的关于"提升大模型的理解能力"的步骤对数据包进行预处理,包括"数据向量化"等。
2. 配置数据权限
飞书登陆衡石的用户默认只有查看权限,而且对数据包默认是不可读的,可以把数据包的"查看者"权限授权给 ALL_USERS 用户组,这个方式比较快捷,控制的粒度比较粗。也可以针对每个已经通过飞书登陆过衡石的用户单独设置数据权限。还可以通过用户属性设置权限。更多信息请参考衡石数据权限相关的文档。
飞书中继续设置机器人应用
1. 设置事件与回调
在刚创建的飞书应用设置页面"事件与回调"部分的"事件配置"标签页,选择订阅方式为"使用 长连接 接收事件"并保存。然后点击"添加事件"按钮,搜索并勾选添加"接收消息 v2.0"(im.message.receive_v1)事件。


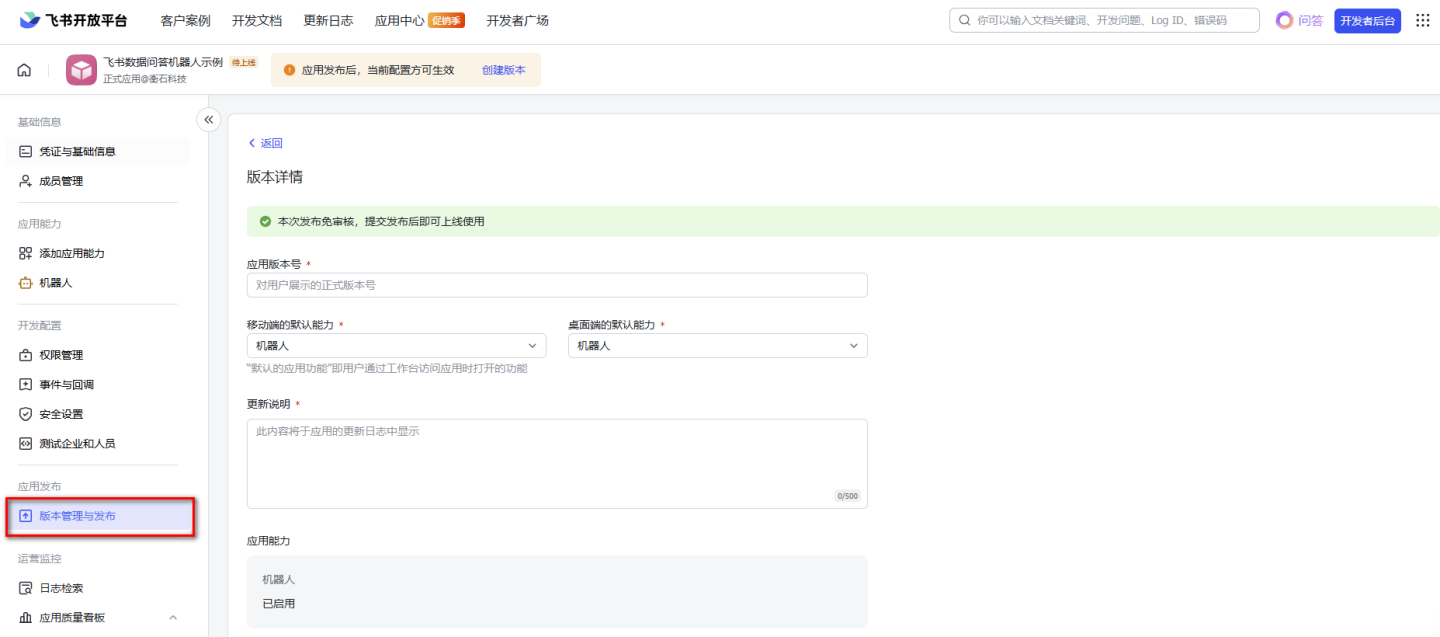
2. 创建版本并发布
根据需要及飞书要求填写应用版本号,更新说明,选择可用范围。申请线上发布。
3. 应用审核
请飞书的企业中的管理员审核应用并通过后即可使用。
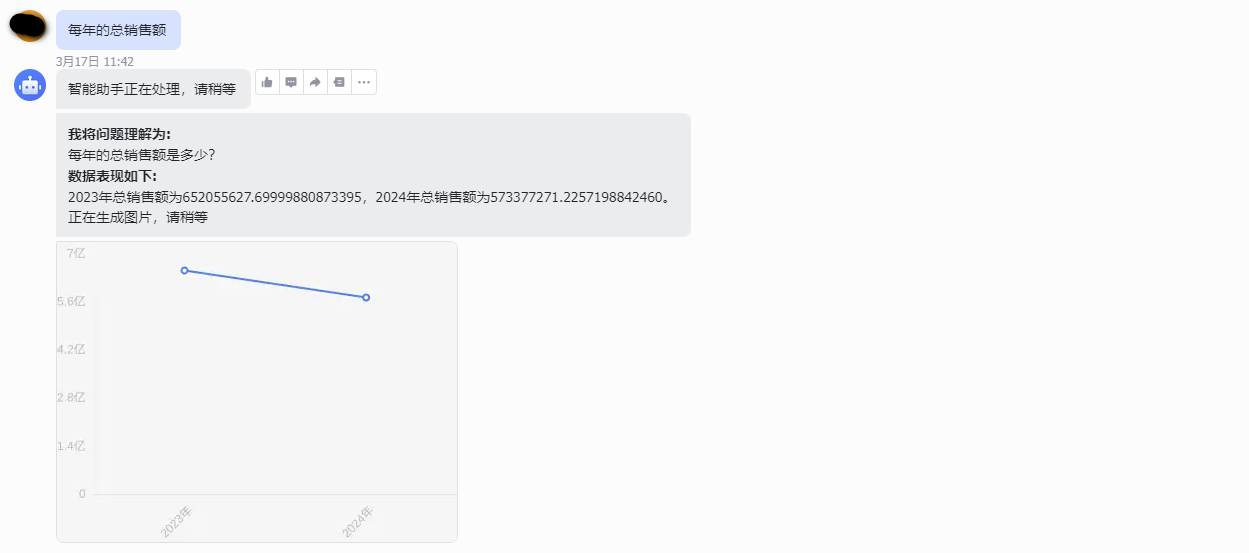
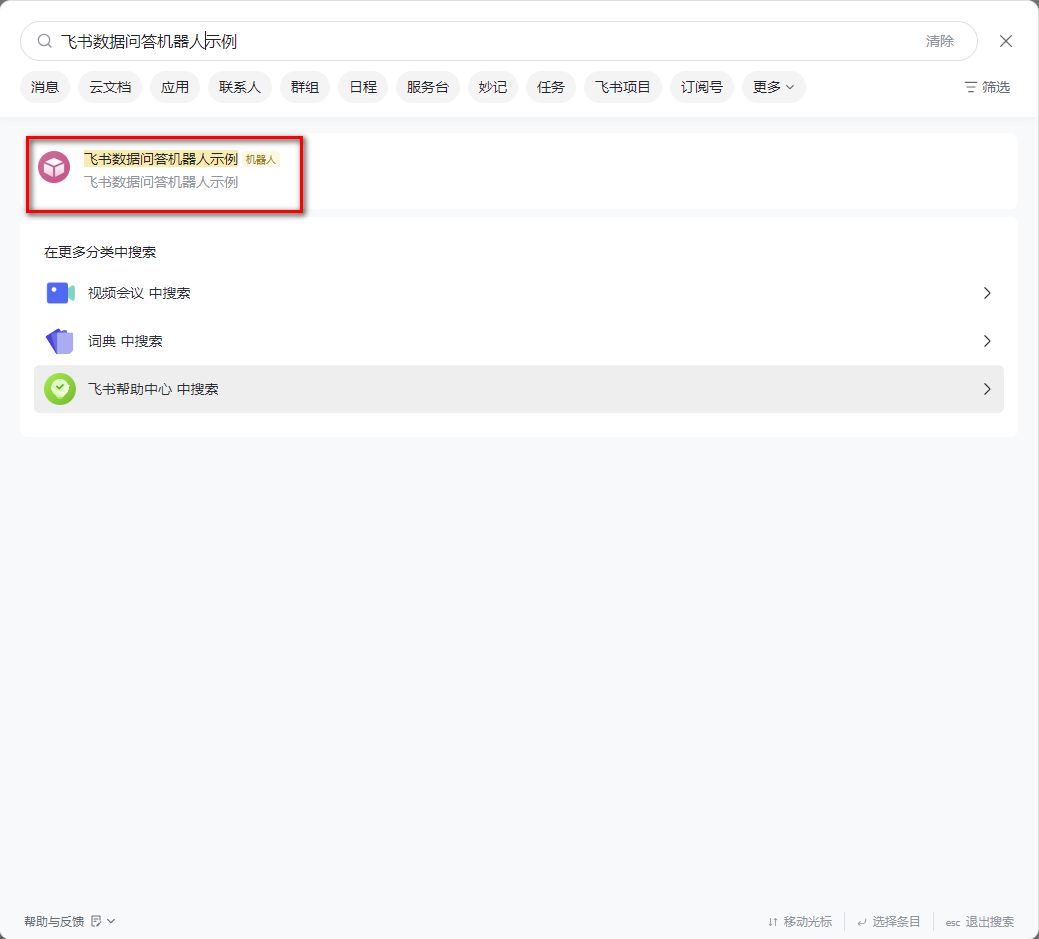
飞书聊天窗口中和机器人对话
在飞书中按刚才创建的飞书应用的名称搜索,可以搜到机器人,点击机器人即可开始对话。
对话效果如下: