19.1模板匹配
模板匹配就是用模板图(通常是一个小图)在目标图像(通常是一个比模板图大的图片)中不断的滑动比较,通过某种比较方法来判断是否匹配成功,找到模板图所在的位置。
不会有边缘填充。
类似 于卷积 ,滑动比较 ,挨个比较象素。
返回结果大小是:目标图大小-模板图大小+1。
19.2 匹配方法
res=cv2.matchTemplate(image, templ, method)
image:原图像,这是一个灰度图像或彩色图像(在这种情况下,匹配将在每个通道上独立进行)。
templ:模板图像,也是灰度图像或与原图像相同通道数的彩色图像。
method:匹配方法,可以是以下之一:
cv2.TM_CCOEFF
cv2.TM_CCOEFF_NORMED
cv2.TM_CCORR
cv2.TM_CCORR_NORMED
cv2.TM_SQDIFF
cv2.TM_SQDIFF_NORMED
这些方法决定了如何度量模板图像与原图像子窗口之间的相似度。
返回值res
函数在完成图像模板匹配后返回一个结果矩阵,这个矩阵的大小与原图像相同。矩阵的每个元素表示原图像中相应位置与模板图像匹配的相似度。
匹配方法不同,返回矩阵的值的含义也会有所区别。以下是几种常用的匹配方法及其返回值含义:
-
cv2.TM_SQDIFF或cv2.TM_SQDIFF_NORMED:返回值越接近0 ,表示匹配程度越好。最小值对应的最佳匹配位置。
-
cv2.TM_CCORR或cv2.TM_CCORR_NORMED:返回值越大 ,表示匹配程度越好。最大值对应的最佳匹配位置。
-
cv2.TM_CCOEFF或cv2.TM_CCOEFF_NORMED:返回值越大 ,表示匹配程度越好。最大值对应的最佳匹配位置。
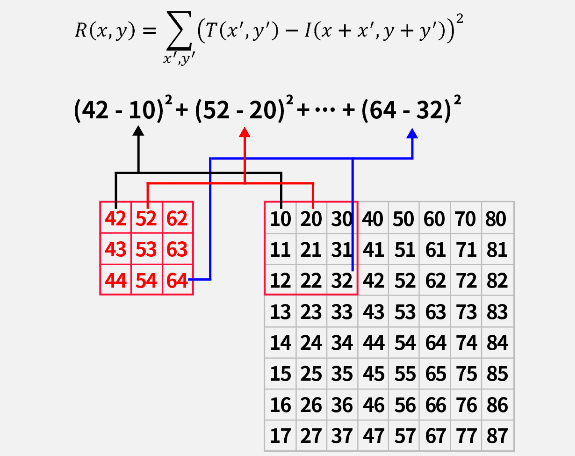
19.2.1 平方差匹配
cv2.TM_SQDIFF
以模板图与目标图所对应的像素值使用平方差公式来计算,其结果越小,代表匹配程度越高,计算过程举例如下。
注意:模板匹配过程皆不需要边缘填充,直接从目标图像的左上角开始计算。
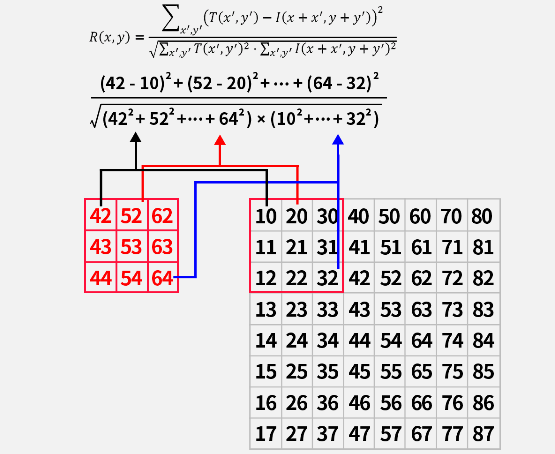
19.2.2 归一化平方差匹配
cv2.TM_SQDIFF_NORMED
与平方差匹配类似,只不过需要将值统一到0到1,计算结果越小,代表匹配程度越高,计算过程举例如下。
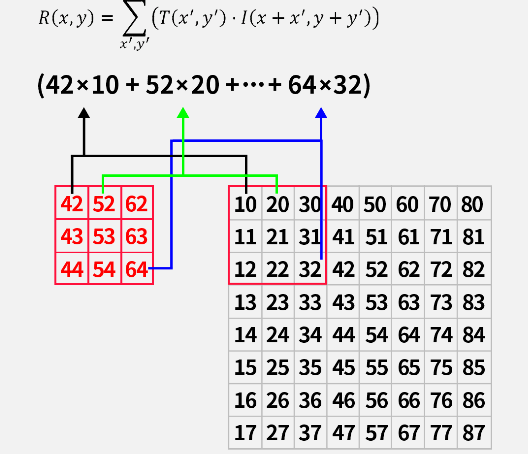
19.2.3 相关匹配
cv2.TM_CCORR
使用对应像素的乘积进行匹配,乘积的结果越大其匹配程度越高,计算过程举例如下。
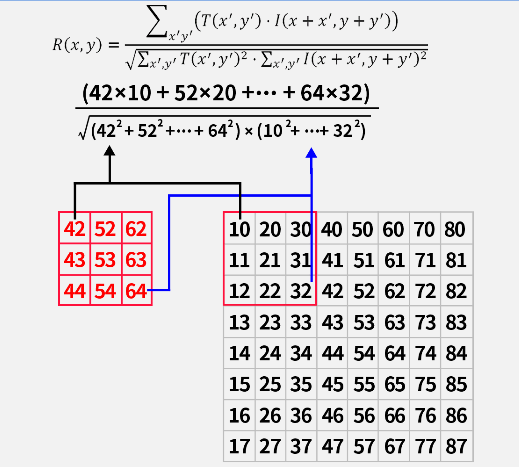
19.2.4 归一化相关匹配
cv2.TM_CCORR_NORMED
与相关匹配类似,只不过是将其值统一到0到1之间,值越大,代表匹配程度越高,计算过程举例如下。
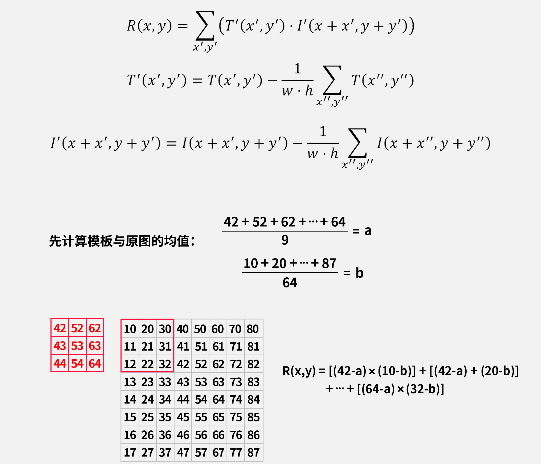
19.2.5 相关系数匹配
cv2.TM_CCOEFF
需要先计算模板与目标图像的均值,然后通过每个像素与均值之间的差的乘积再求和来表示其匹配程度,1表示完美的匹配,-1表示最差的匹配,计算过程举例如下。
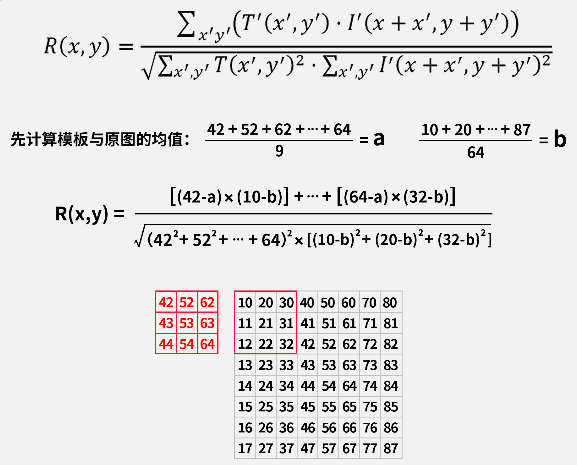
19.2.6 归一化相关系数匹配
cv2.TM_CCOEFF_NORMED
也是将相关系数匹配的结果统一到0到1之间,值越接近1代表匹配程度越高,计算过程举例如下。
19.3 绘制轮廓
找的目标图像中匹配程度最高的点,我们可以设定一个匹配阈值来筛选出多个匹配程度高的区域。
- loc=np.where(array > 0.8) #loc包含array中所有大于0.8的元素索引的数组
np.where(condition) 是 NumPy 的一个函数,当条件为真时,返回满足条件的元素的索引。
-
zip(*loc)
-
*loc是解包操作,将loc中的多个数组拆开,作为单独的参数传递给zip。 -
zip将这些数组按元素一一配对,生成一个迭代器,每个元素是一个元组,表示一个坐标点。
-
x=list([[1,2,3,4,3],[23,4,2,4,2]])
print(list(zip(*x)))#[(1, 23), (2, 4), (3, 2), (4, 4), (3, 2)]
python
import cv2 as cv
import numpy as np
#读图
img = cv.imread('images/huoyingrenzhe.jpg')
temp = cv.imread('images/zhipai.jpg')
#转灰度
img_gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
temp_gray = cv.cvtColor(temp, cv.COLOR_BGR2GRAY)
#模板匹配,拿到匹配结果,返回匹配程度矩阵
res = cv.matchTemplate(img_gray, temp_gray, cv.TM_CCOEFF_NORMED)
#设置阈值,使用np.where()获取符合条件的坐标
threshold = 0.8
#得到[[y1,y2,y3...],[x1,x2,x3...]]
loc = np.where(res >= threshold)
h,w = temp.shape[:2]
#解包
for pt in zip(*loc[::-1]):
cv.rectangle(img, pt, (pt[0] + w, pt[1] + h), (0, 0, 255), 2)
cv.imshow('img', img)
cv.waitKey(0)
cv.destroyAllWindows()|-----------------------------------------------------------------------------|-----------------------------------------------------------------------------|
|  |
|  |
|

注意得到\[y1,y2,y3...,x1,x2,x3...]这样的返回值,因为先返回行索引再返回列索引