双轴太阳能追光系统 - ESP32实现
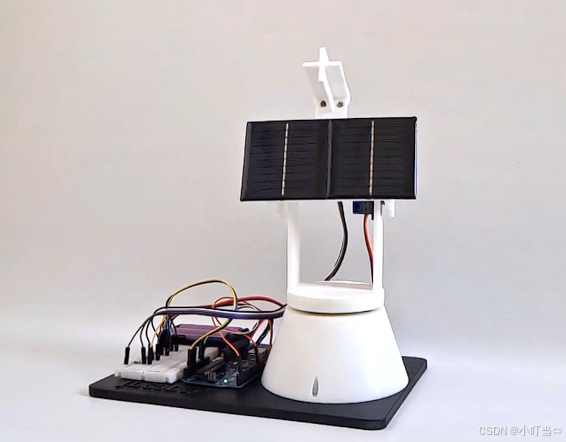
系统概述
这个系统使用:
- ESP32开发板
- 2个舵机(水平方向和垂直方向)
- 4个光敏电阻(用于检测光照方向)
- 适当的电阻(用于光敏电阻分压)
接线示意图
+-------------------+ +-----------------+
| ESP32 | | 光敏电阻 |
| | | L1 L2 |
| GND |-------| GND GND |
| 3.3V |-------| VCC VCC |
| GPIO32|------| L1信号 |
| GPIO33|------| L2信号 |
| GPIO34|------| L3信号 |
| GPIO35|------| L4信号 |
| | | |
| GPIO25|------| 水平舵机信号 |
| GPIO26|------| 垂直舵机信号 |
| | | |
| GND |-------| 舵机GND |
| 5V |-------| 舵机VCC |
+-------------------+ +-----------------+光敏电阻布置:
- L1: 左侧
- L2: 右侧
- L3: 上侧
- L4: 下侧
所需组件清单
- ESP32开发板
- SG90舵机 x2
- 光敏电阻 x4
- 10kΩ电阻 x4
- 面包板和跳线若干
- 太阳能板(可选,用于实际应用)
VSCode代码实现
首先确保您已安装PlatformIO插件,然后创建一个新的ESP32项目。
完整的环境配置步骤
- 安装必要的工具
安装VSCode
在VSCode扩展商店中搜索安装PlatformIO IDE
- 创建新项目
按Ctrl+Shift+P → 输入PlatformIO: New Project
选择板子型号:ESP32 Dev Module
选择框架:Arduino
完成创建
- 修改配置文件
打开platformio.ini文件,修改为以下内容:
c
[env:esp32dev]
platform = espressif32
board = esp32dev
framework = arduino
monitor_speed = 115200
lib_deps =
madhephaestus/ESP32Servo@^0.12.0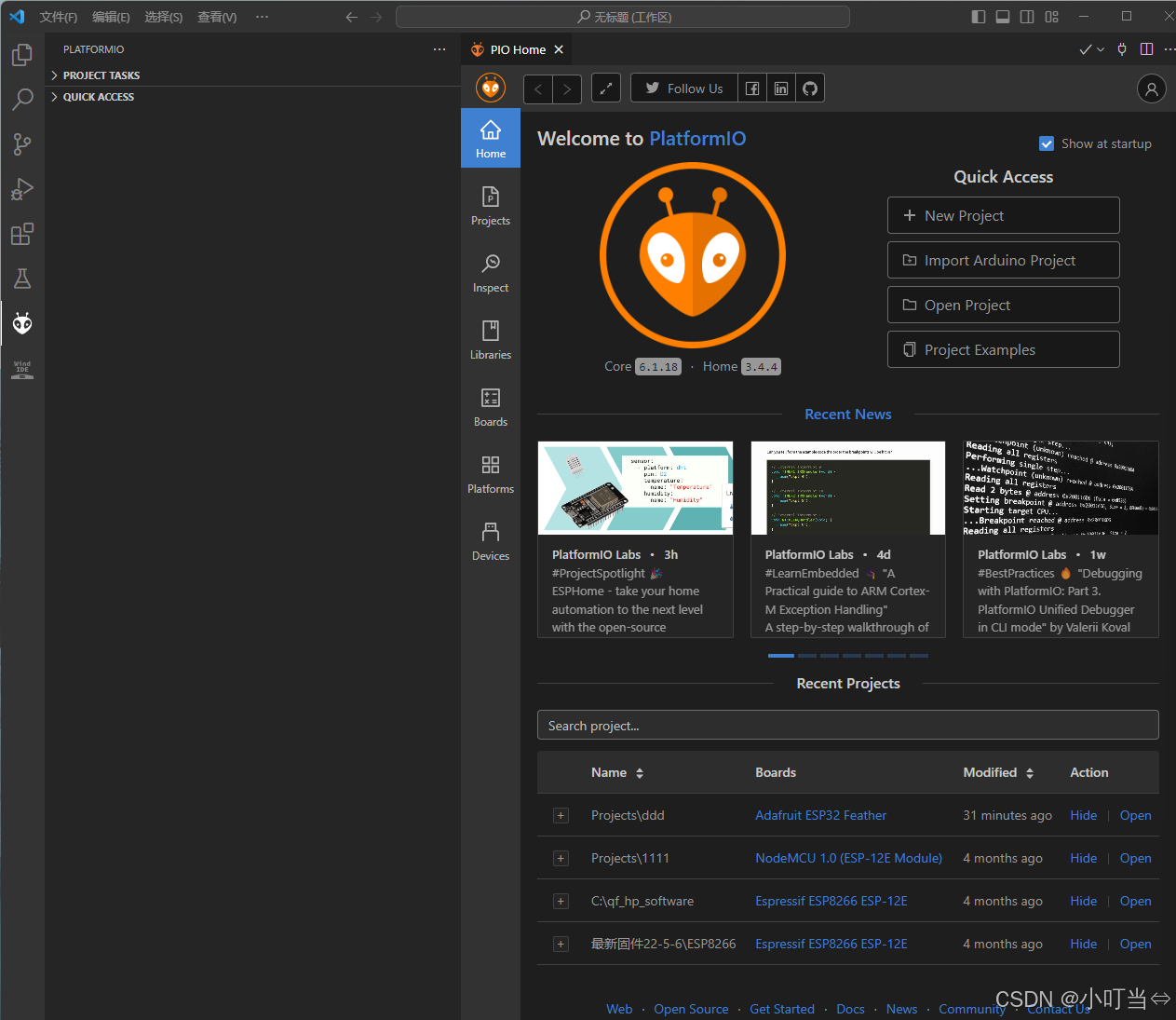

代码 (main.cpp)
cpp
#include <Arduino.h>
#include <ESP32Servo.h>
// 定义光敏电阻引脚
#define L1_PIN 32 // 左侧
#define L2_PIN 33 // 右侧
#define L3_PIN 34 // 上侧
#define L4_PIN 35 // 下侧
// 定义舵机引脚
#define SERVO_HORIZ_PIN 25 // 水平舵机
#define SERVO_VERT_PIN 26 // 垂直舵机
// 创建舵机对象
Servo servoHoriz; // 水平方向舵机
Servo servoVert; // 垂直方向舵机
// 舵机初始位置
int horizPos = 90; // 水平初始位置 (0-180)
int vertPos = 90; // 垂直初始位置 (0-180)
// 光敏电阻读数
int l1, l2, l3, l4;
// 舵机移动步长
const int STEP = 2;
// 光敏电阻阈值差
const int THRESHOLD = 50;
void setup() {
Serial.begin(115200);
// 初始化舵机
servoHoriz.attach(SERVO_HORIZ_PIN);
servoVert.attach(SERVO_VERT_PIN);
// 设置初始位置
servoHoriz.write(horizPos);
servoVert.write(vertPos);
// 光敏电阻不需要设置模式,因为它们是模拟输入
}
void loop() {
// 读取所有光敏电阻值
l1 = analogRead(L1_PIN); // 左
l2 = analogRead(L2_PIN); // 右
l3 = analogRead(L3_PIN); // 上
l4 = analogRead(L4_PIN); // 下
// 打印传感器值用于调试
Serial.printf("L1: %d, L2: %d, L3: %d, L4: %d\n", l1, l2, l3, l4);
// 水平方向控制
int horizDiff = l1 - l2;
if (abs(horizDiff) > THRESHOLD) {
if (horizDiff > 0 && horizPos < 180) {
horizPos += STEP; // 向左转
} else if (horizDiff < 0 && horizPos > 0) {
horizPos -= STEP; // 向右转
}
servoHoriz.write(horizPos);
}
// 垂直方向控制
int vertDiff = l3 - l4;
if (abs(vertDiff) > THRESHOLD) {
if (vertDiff > 0 && vertPos < 180) {
vertPos += STEP; // 向上转
} else if (vertDiff < 0 && vertPos > 0) {
vertPos -= STEP; // 向下转
}
servoVert.write(vertPos);
}
// 打印当前位置
Serial.printf("Horizontal Position: %d, Vertical Position: %d\n", horizPos, vertPos);
// 延迟以避免过快响应
delay(100);
}platformio.ini 配置
ini
[env:esp32dev]
platform = espressif32
board = esp32dev
framework = arduino
monitor_speed = 115200
lib_deps =
ESP32Servo系统工作原理
- 光敏电阻检测:四个光敏电阻分别检测四个方向的光照强度。
- 方向判断:通过比较左右光敏电阻的值差判断水平方向,比较上下光敏电阻的值差判断垂直方向。
- 舵机控制:根据光照差异调整舵机位置,使太阳能板始终朝向光照最强的方向。
- 阈值控制:只有当光照差异超过阈值时才调整位置,避免微小变化导致的频繁调整。
模型
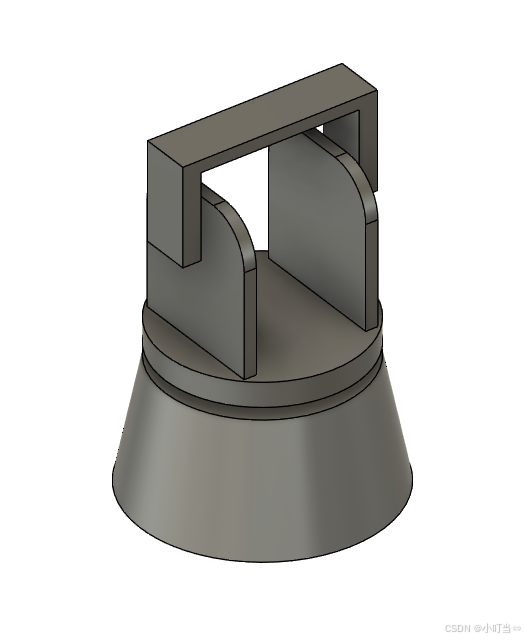
尽管这个模型在网络上流传甚广,但是我没有找到视频中的程序和模型,使用我自己构建了一个
优化建议
- 可以添加PID控制算法使运动更加平滑
- 可以增加夜间复位功能,当所有光敏电阻值都很低时回到初始位置
- 可以添加WiFi功能,通过手机APP监控和调整系统
- 考虑添加太阳能电池电压检测功能
注意事项
- 确保舵机电源足够(可能需要外部电源)
- 光敏电阻需要合理布置,避免相互干扰
- 根据实际光照情况调整THRESHOLD和STEP值
- 注意舵机的机械限位,避免损坏
这个系统可以有效地跟踪太阳位置,提高太阳能板的发电效率。您可以根据实际需求进一步调整和优化代码。