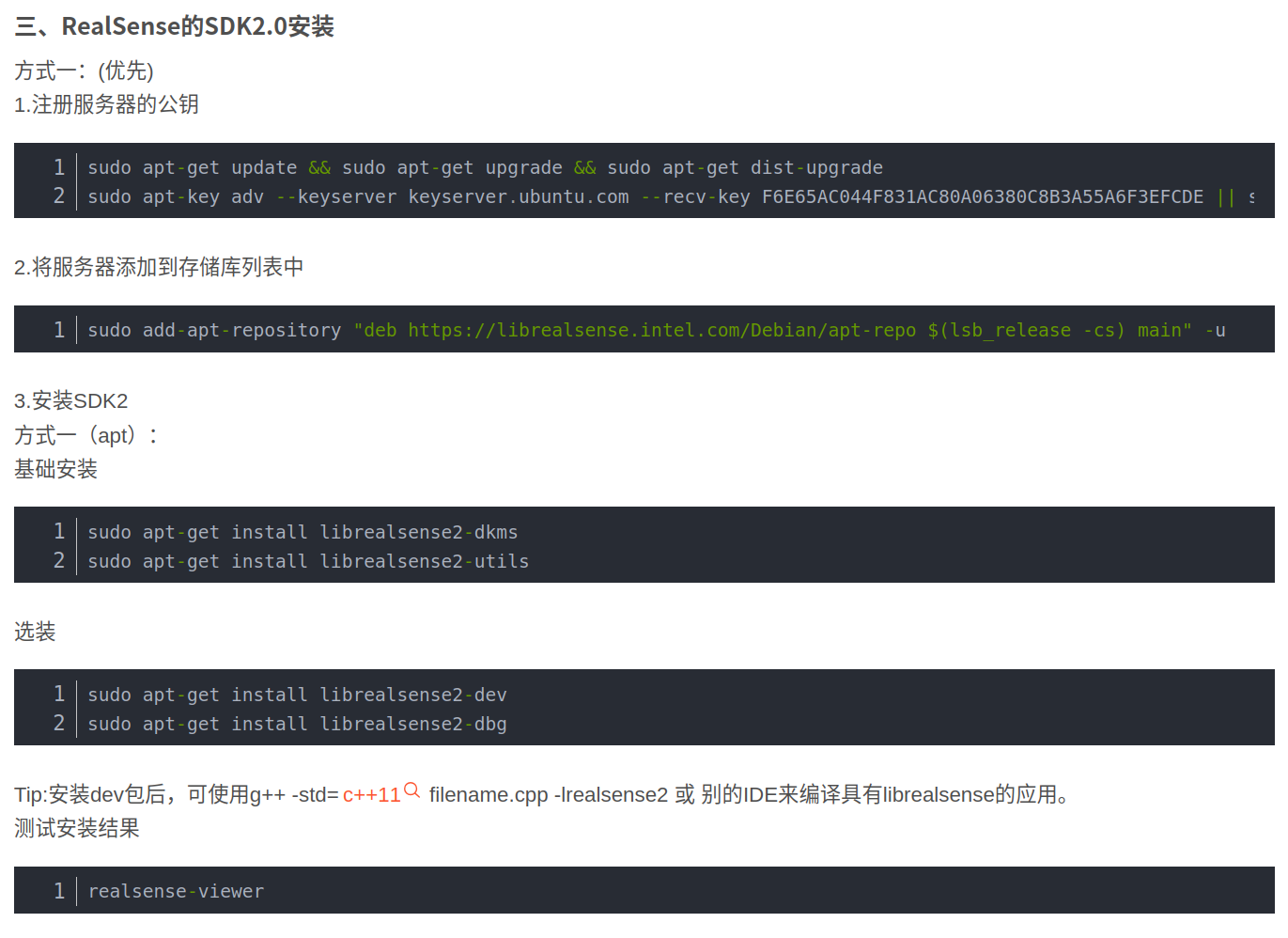
配置sdk使用
Ubuntu20.04LTS下安装Intel Realsense D435i驱动与ROS包_realsense的驱动包-CSDN博客
中的方法一
之后不通过apt安装包,使用官方的安装步骤直接clone
https://github.com/IntelRealSense/realsense-ros/tree/ros1-legacy
从这一步开始
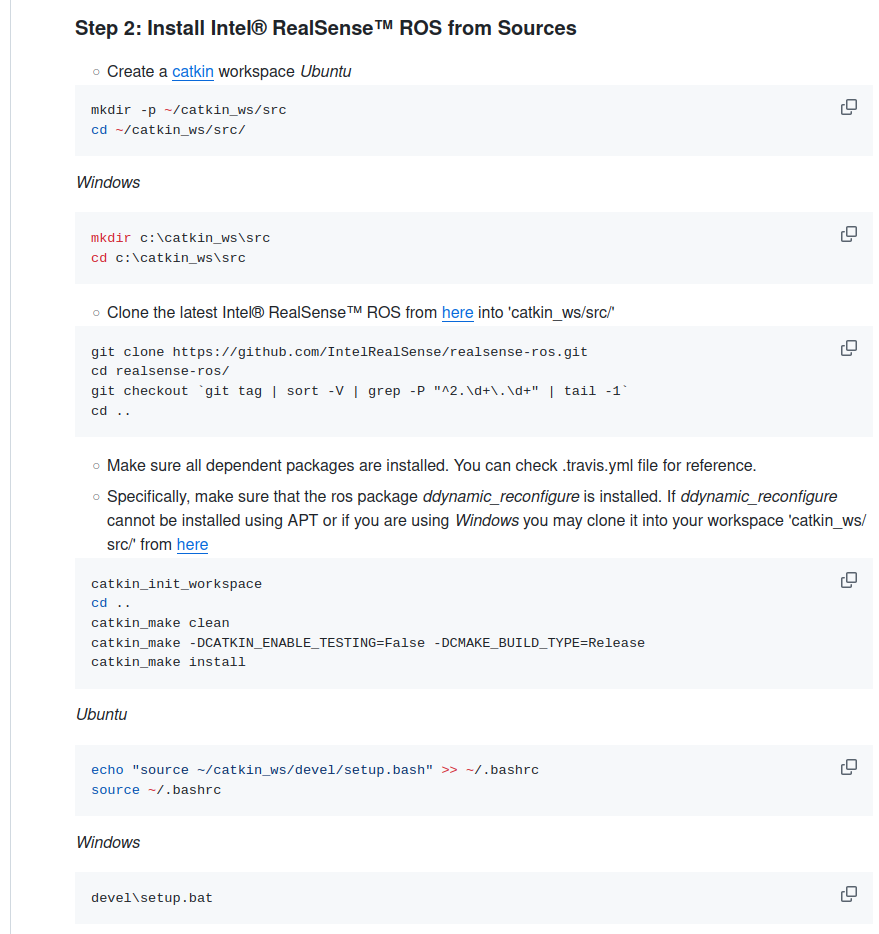
执行完

这一步后需要修改代码,代码位于下面终端路径下的constants.h中修改405pid为0x0B5B
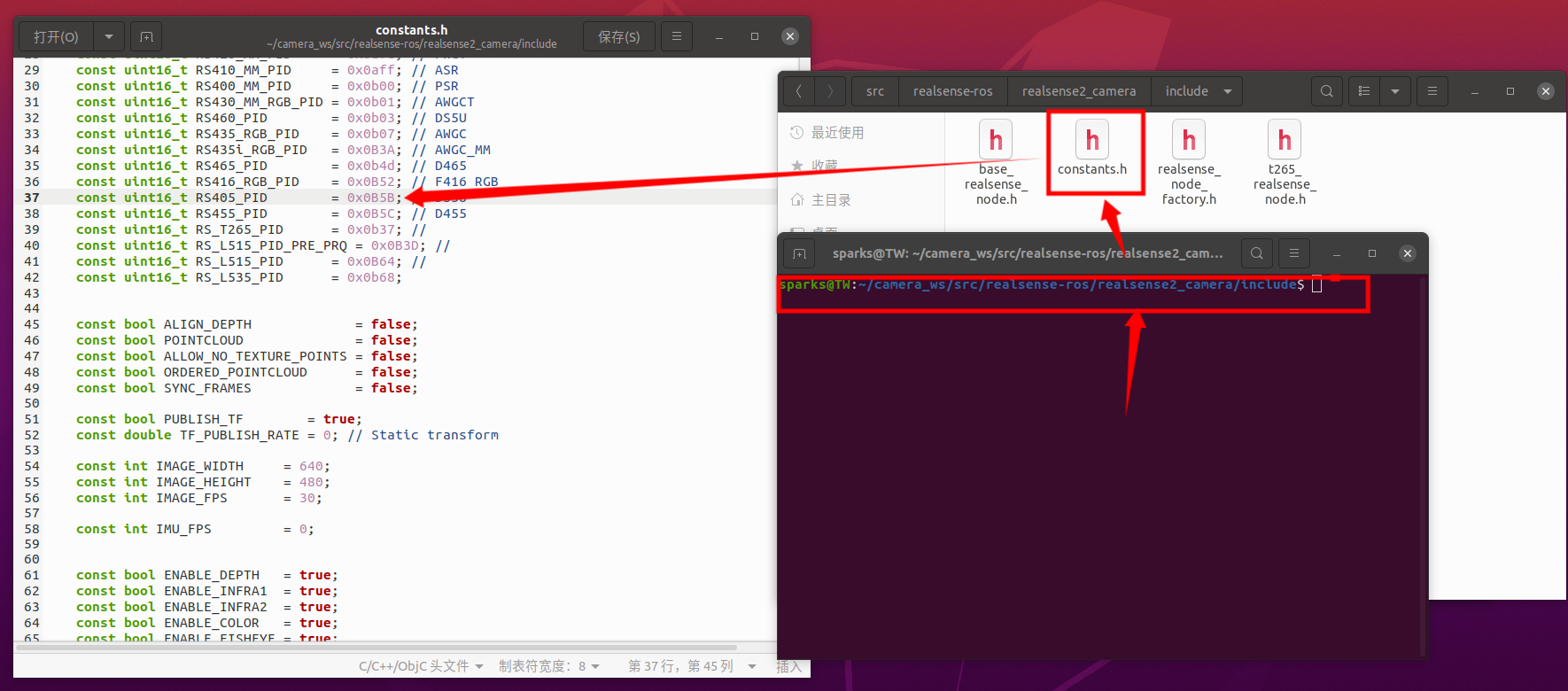
修改代码后需要在此进行编译
步骤如下(这里一开始是在camera_ws/src)
bash
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install之后运行程序即可实现对405的ros1支持。
启动相机节点
bash
roslaunch realsense2_camera rs_camera.launch启动相机并用rviz查看
bash
roslaunch realsense2_camera demo_pointcloud.launch 虽然会有报错,但是暂不知原因,故且认作不做影响,如果有问题会更新在这里。