一:进一步学习了
今天学习下VisionMaster中的路径提取:可在绘制的路径上等间隔取点或查找边缘点
二:开始学习
1:什么是路径提取?
相当于事先指定一段路径,然后在对应的路径上查找边缘,这个也是边缘的衍生应用,所以学习机器视觉关键在于基础要学扎实,很多应用其实就是基础知识的叠加应用
2:应用场景:典型的场景是点胶检测,判断胶路质量,有没有断胶等,一开始这胶路检测,真的是难倒我了,特别是不规则图像如何检测,学习了这个算子后,思路一下子打开了,原来还可以这么搞!
三:直接上案例
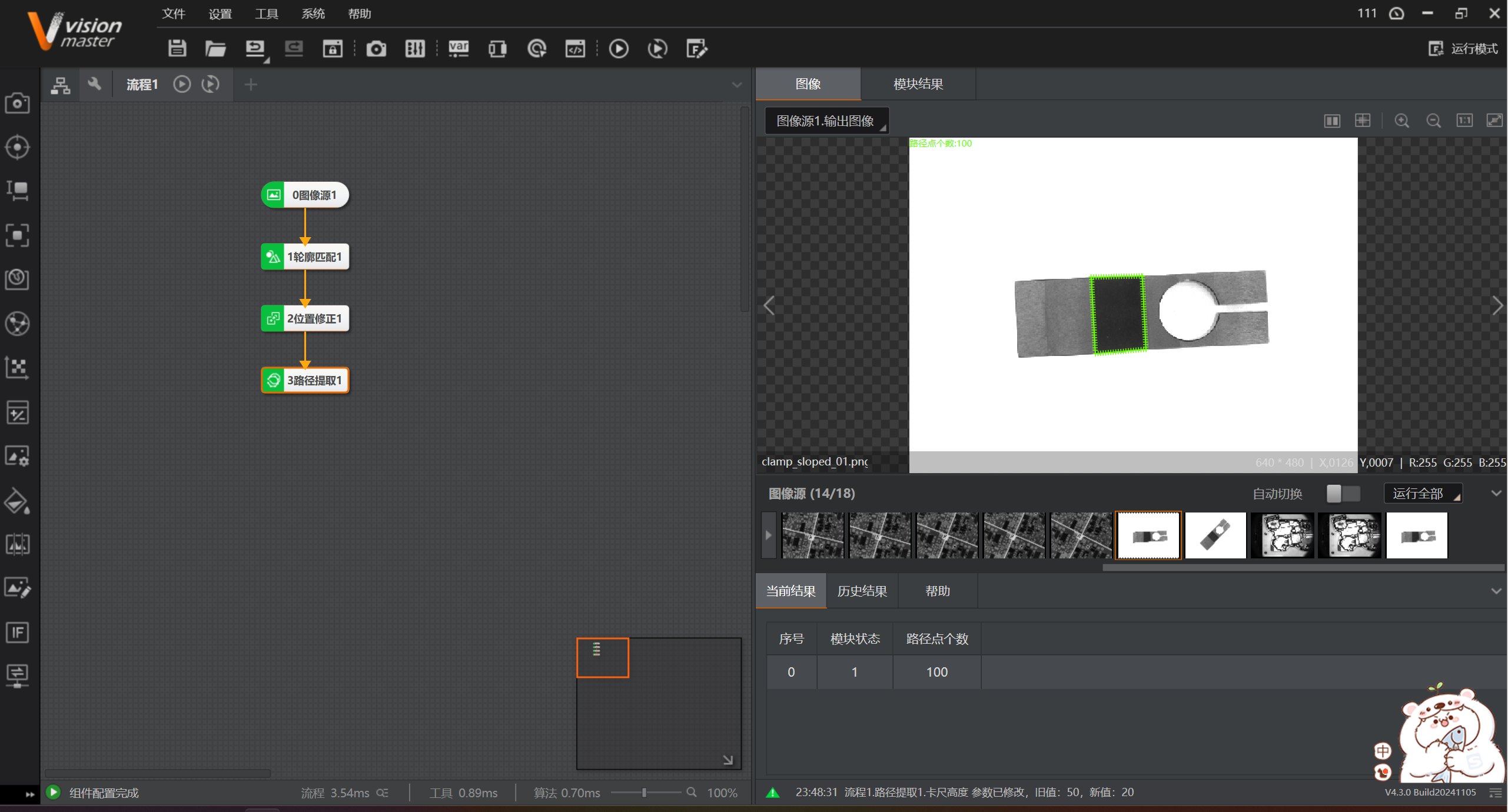
1:先导入需要测试的图片集合
2:使用轮廓定位,把两个组件的线连起来,这里是需要设定模版匹配功能,这样图像不管怎么旋转都能准确定位图像位置,具体操作步骤可以参考前面课程
3:拖入位置修正功能:这个非常重要,这里也不提了,可以参考上一篇笔记
4:拖入路径提取模块

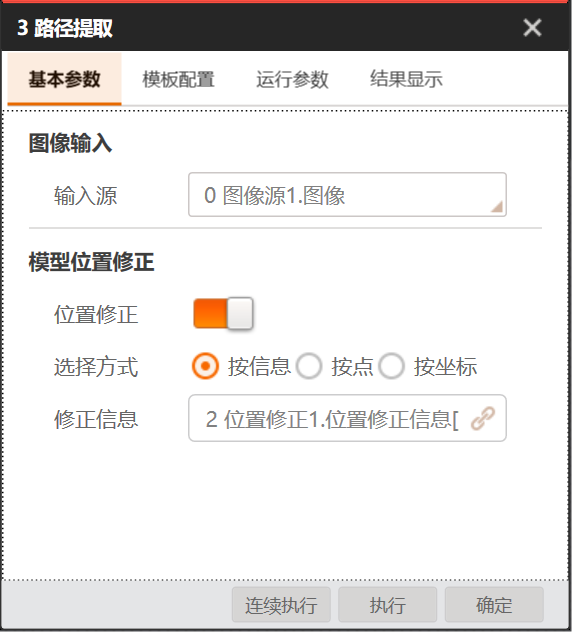
5:双击组件,开始设定参数:
基本参数:这里和之前介绍的模块一样,就是设定跟踪
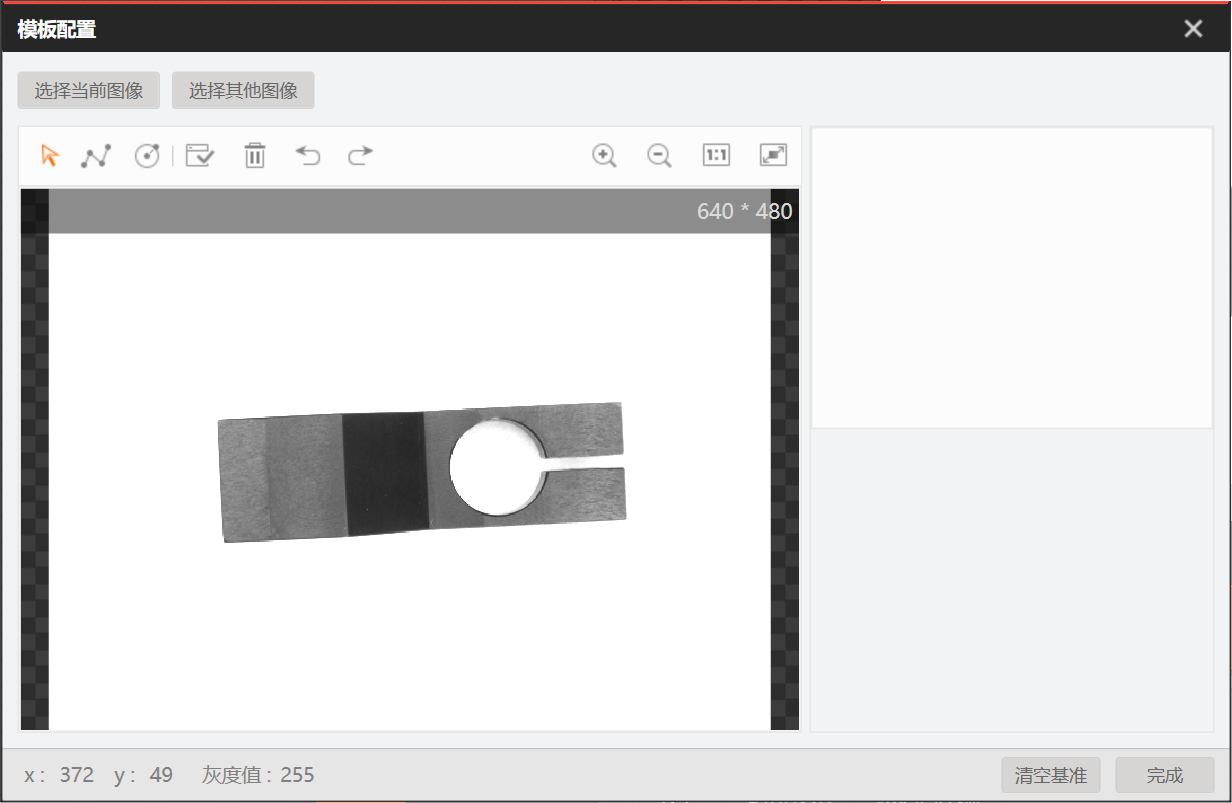
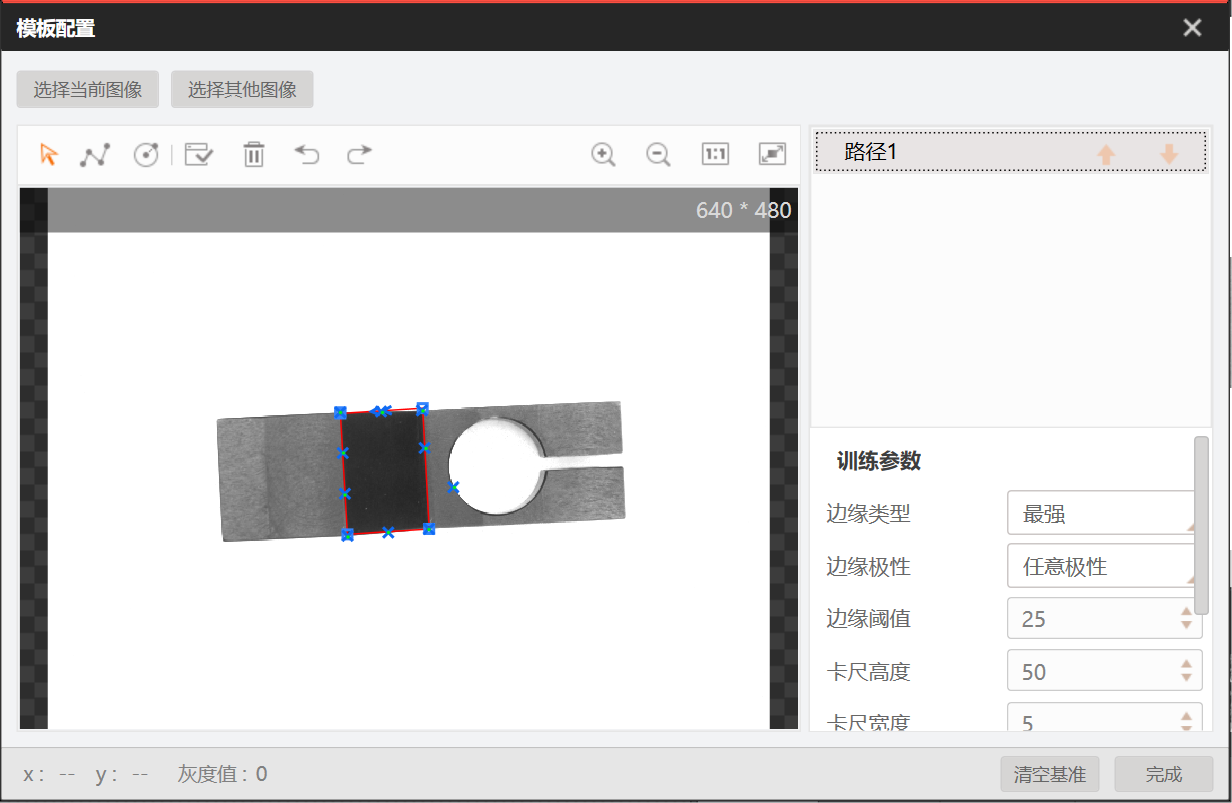
模版设置:点击"新建模型",然后在弹出来的界面里面就可以开始创建路径了

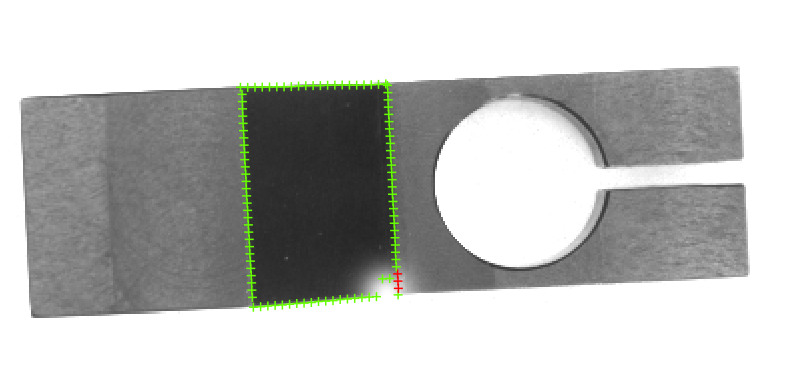
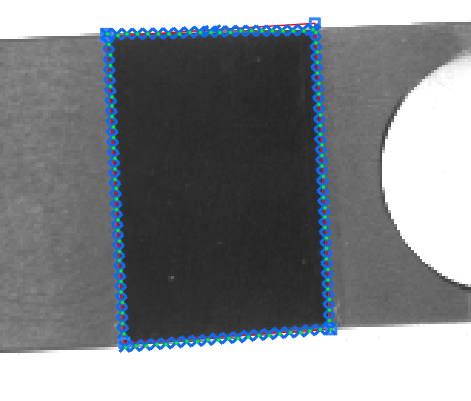
(1):点一下 创建轨迹,然后在需要检测的地方画上一圈,比如下图我在黑色的区域边缘画上了一圈路径,注意下画完后(到终点了)可以双击鼠标左键,就完成路径创建了

(2):接下来就是开始设定参数了,点击右边路径1这个名字的右边空白处,会弹出设定菜单
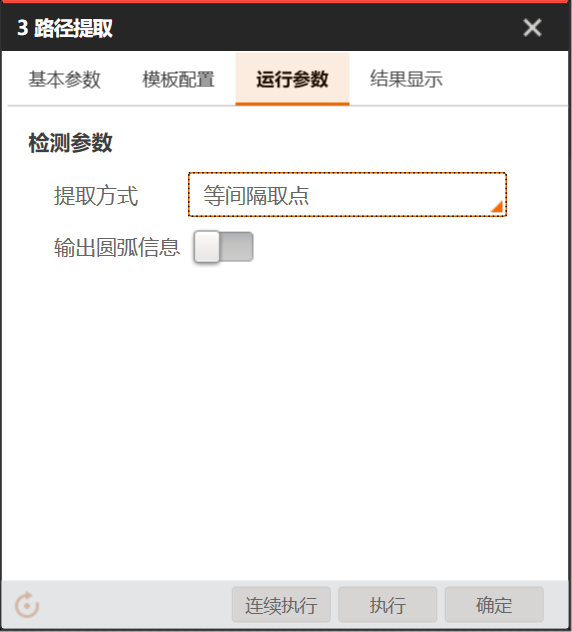
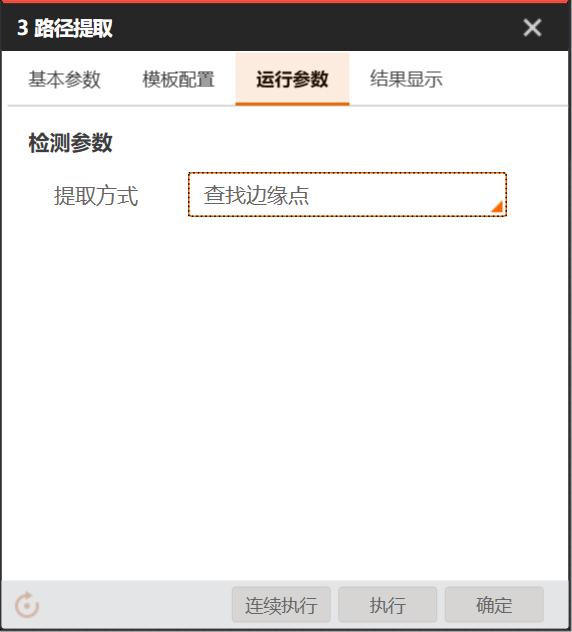
*这里也需要注意下,这里有两种模式,在运行参数的这一栏有"等距离取点"和"查找边缘点"两个检测模式,说实话,那个等距离取点我也没搞懂有什么用,我拿了OK和NG的图片去对比,好像没有什么实际用处,无法检测(不知道有没有小伙伴知道这个模式到底是怎么用的!!!)
(3):继续刚刚的参数设定,点击路径1空白处会出现如下参数信息,其中的参数含义我这里就不介绍了,前面说了N个边缘检测的衍生应用,可以参考下前面的课。
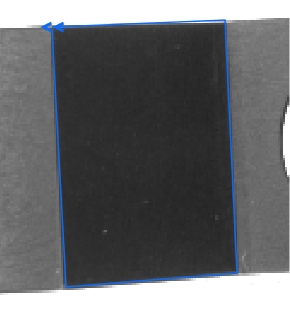
(4):调完参数后想看下实际的效果,就可以点击工具栏上的"生成模型"

生成了100个检测点(我设定了100个),然后点击"完成"就可以了
四:实测:上述设定好参数,开始实际测量看看效果,不同的检测模式下的检测效果
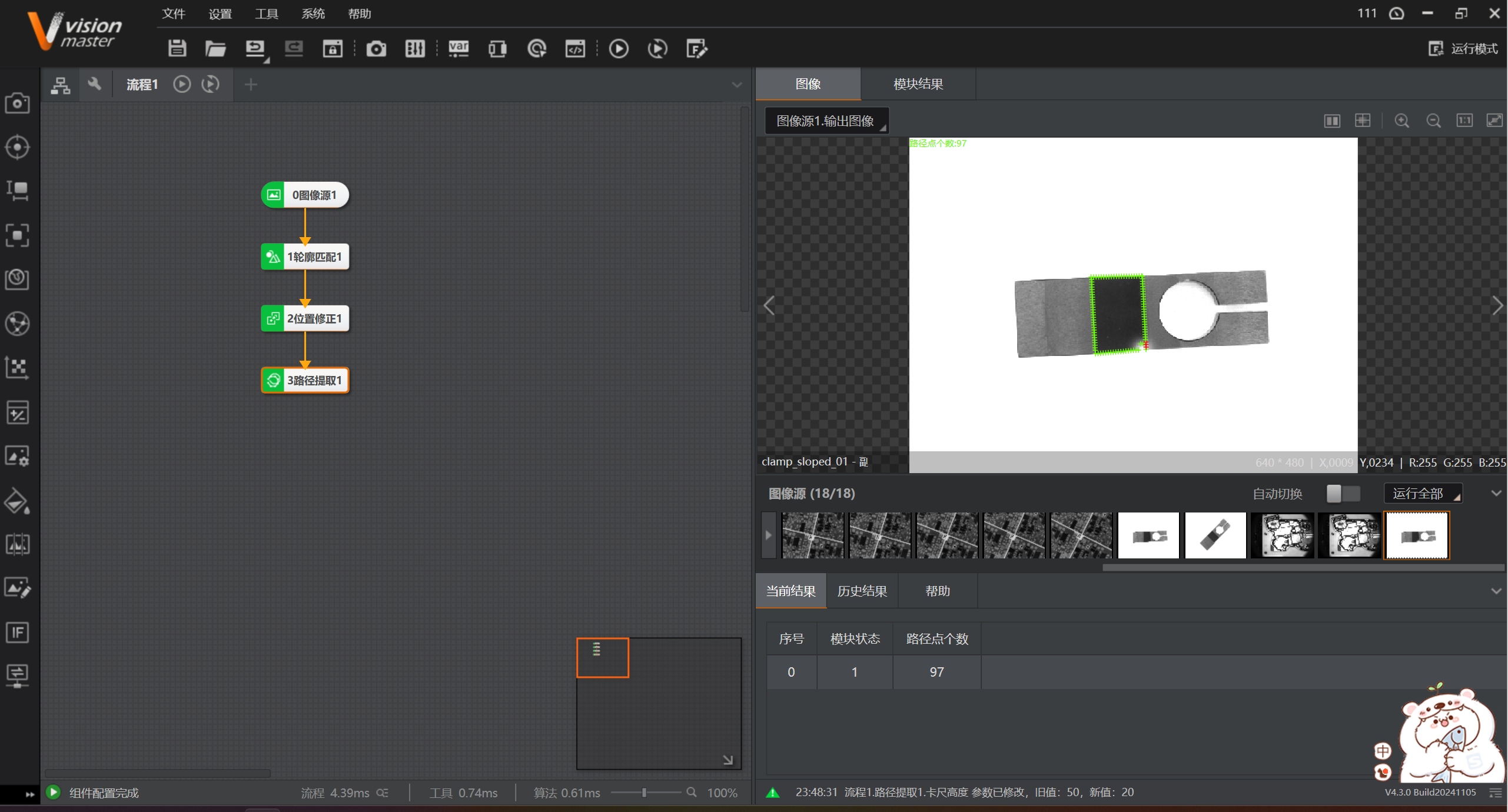
可以看到有的边缘点找不到实际的边缘了,就会用NG标识出来