文章目录
概要
在 VTK 中对体数据进行二维图像处理的过程通常涉及从三维体数据中提取二维切片,并对这些切片进行处理。然后,可以选择性地将处理后的切片数据重新合并成新的体数据。
以下是对 VTK 中的体数据进行二维图像处理的基本步骤:
-
提取二维切片
体数据通常是三维数据(例如,CT 扫描、MRI 扫描等)。在进行二维图像处理时,通常从三维数据中提取出单个切片(沿某个方向的切片)。这可以使用 vtkImageReslice 完成,vtkImageReslice 可以帮助从三维数据中生成二维切片。
-
对二维切片进行图像处理
一旦您提取了二维切片,就可以对其进行各种图像处理操作,如平滑、滤波、阈值化、边缘检测等。可以使用 VTK 提供的一些滤波器(如 vtkImageGaussianSmooth)和图像处理类(如 vtkImageThreshold)。
-
将处理后的切片重新合并成体数据
处理过的二维切片可以重新组合为新的三维体数据。这可以通过逐层更新 vtkImageData 中的像素值来实现。
Cpp代码
cpp
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL2);
VTK_MODULE_INIT(vtkInteractionStyle);
VTK_MODULE_INIT(vtkRenderingVolumeOpenGL2);
VTK_MODULE_INIT(vtkRenderingFreeType);
#include <vtkSmartPointer.h>
#include <vtkGPUVolumeRayCastMapper.h>
#include <vtkVolumeProperty.h>
#include <vtkColorTransferFunction.h>
#include <vtkPiecewiseFunction.h>
#include <vtkRenderer.h>
#include <vtkRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkImageReslice.h>
#include <vtkDirectory.h>
#include <vtkDICOMReader.h>
#include <windows.h>
#include <psapi.h>
#include <vtkDICOMImageReader.h>
#include <vtkImageMedian3D.h>
#include <vtkImageData.h>
#include <vtkImageGaussianSmooth.h>
#include <vtkImageThreshold.h>
#include <vtkImageHybridMedian2D.h>
int main(int argc, char* argv[]) {
// 验证目录是否存在
vtkSmartPointer<vtkDirectory> dir = vtkSmartPointer<vtkDirectory>::New();
if (!dir->Open("E:/yp/vtk/3DMR-main/dicom3/")) {
std::cerr << "错误:无法打开DICOM目录" << std::endl;
return EXIT_FAILURE;
}
// 1. 读取DICOM序列
vtkSmartPointer<vtkDICOMImageReader> reader = vtkSmartPointer<vtkDICOMImageReader>::New();
reader->SetDirectoryName("E:/yp/vtk/3DMR-main/dicom/"); // 替换为实际路径
reader->Update();
vtkSmartPointer<vtkImageData> imageData = reader->GetOutput();
// 2. 数据预处理(可选)
// 如果需要对每个切片进行处理(例如阈值化或平滑),可以遍历每个切片并进行处理
int* extent = imageData->GetExtent();
int dims[3];
dims[0] = extent[1] - extent[0] + 1;
dims[1] = extent[3] - extent[2] + 1;
dims[2] = extent[5] - extent[4] + 1;
// 获取图像的原点和间距
double origin[3];
imageData->GetOrigin(origin);
double spacing[3];
imageData->GetSpacing(spacing);
// 遍历每个z切片
for (int z = 0; z < dims[2]; ++z) {
// 使用vtkImageReslice提取当前切片
vtkSmartPointer<vtkImageReslice> reslice = vtkSmartPointer<vtkImageReslice>::New();
reslice->SetInputData(imageData);
reslice->SetOutputDimensionality(2);
reslice->SetResliceAxesDirectionCosines(1, 0, 0, 0, 1, 0, 0, 0, 1);
// 设置正确的切片原点
double currentOriginZ = origin[2] + z * spacing[2];
reslice->SetResliceAxesOrigin(origin[0], origin[1], currentOriginZ);
reslice->SetInterpolationModeToNearestNeighbor();
reslice->Update();
// 创建并配置vtkImageHybridMedian2D滤波器
/*
vtkSmartPointer<vtkImageHybridMedian2D> hybridMedian = vtkSmartPointer<vtkImageHybridMedian2D>::New();
hybridMedian->SetInputConnection(reslice->GetOutputPort());
hybridMedian->Update();*/
vtkNew<vtkImageGaussianSmooth> filter;
filter->SetDimensionality(2);
filter->SetInputConnection(reslice->GetOutputPort());
filter->SetStandardDeviations(4, 4);
filter->SetRadiusFactors(2.0, 2.0);
filter->Update();
// 获取处理后的切片数据
vtkSmartPointer<vtkImageData> tempSlice = filter->GetOutput();
// 将处理后的数据写回原始体数据
for (int y = 0; y < dims[1]; ++y) {
for (int x = 0; x < dims[0]; ++x) {
double pixel = tempSlice->GetScalarComponentAsDouble(x, y, 0, 0);
imageData->SetScalarComponentFromDouble(x, y, z, 0, pixel);
}
}
}
// 3. 创建体积映射器
vtkSmartPointer<vtkGPUVolumeRayCastMapper> volumeMapper = vtkSmartPointer<vtkGPUVolumeRayCastMapper>::New();
volumeMapper->SetInputData(imageData);
volumeMapper->SetBlendModeToComposite(); // 使用合成模式
volumeMapper->SetSampleDistance(0.25); // 调整该值来增加/减少采样精度
// 4. 配置传输函数
vtkSmartPointer<vtkColorTransferFunction> colorFun = vtkSmartPointer<vtkColorTransferFunction>::New();
colorFun->AddRGBPoint(0, 0.0, 0.0, 0.0);
colorFun->AddRGBPoint(200, 1.0, 0.5, 0.3); // 软组织
colorFun->AddRGBPoint(500, 0.9, 0.9, 0.9); // 骨骼
vtkSmartPointer<vtkPiecewiseFunction> opacityFun = vtkSmartPointer<vtkPiecewiseFunction>::New();
opacityFun->AddPoint(0, 0.00);
opacityFun->AddPoint(200, 0.05);
opacityFun->AddPoint(500, 0.85);
// 5. 配置体积属性
vtkSmartPointer<vtkVolumeProperty> volumeProperty = vtkSmartPointer<vtkVolumeProperty>::New();
// 开启体积光照
volumeProperty->SetAmbient(0.3);
volumeProperty->SetDiffuse(0.7);
volumeProperty->SetSpecular(0.2);
volumeProperty->SetSpecularPower(50.0);
volumeProperty->SetColor(colorFun);
volumeProperty->SetScalarOpacity(opacityFun);
volumeProperty->SetInterpolationTypeToLinear();
volumeProperty->ShadeOn(); // 启用阴影
// 6. 创建体积对象
vtkSmartPointer<vtkVolume> volume = vtkSmartPointer<vtkVolume>::New();
volume->SetMapper(volumeMapper);
volume->SetProperty(volumeProperty);
// 7. 创建渲染管线
vtkSmartPointer<vtkRenderer> renderer = vtkSmartPointer<vtkRenderer>::New();
renderer->AddVolume(volume);
renderer->SetBackground(0.2, 0.3, 0.4);
vtkSmartPointer<vtkRenderWindow> renderWindow = vtkSmartPointer<vtkRenderWindow>::New();
renderWindow->AddRenderer(renderer);
renderWindow->SetSize(1280, 720);
renderWindow->SetMultiSamples(8); // 启用抗锯齿,8x 超采样
vtkSmartPointer<vtkRenderWindowInteractor> interactor = vtkSmartPointer<vtkRenderWindowInteractor>::New();
interactor->SetRenderWindow(renderWindow);
// 8. 启动交互
renderWindow->Render();
interactor->Start();
return 0;
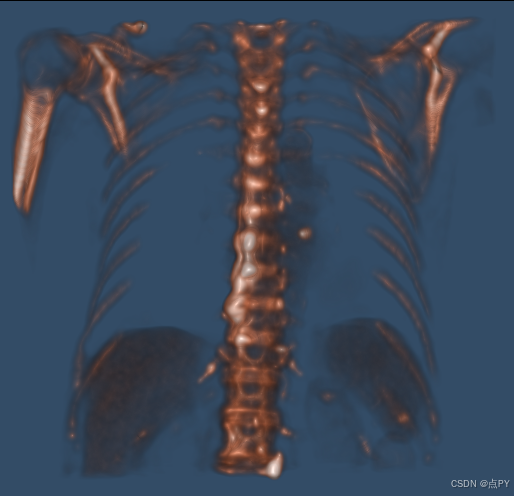
}处理前效果
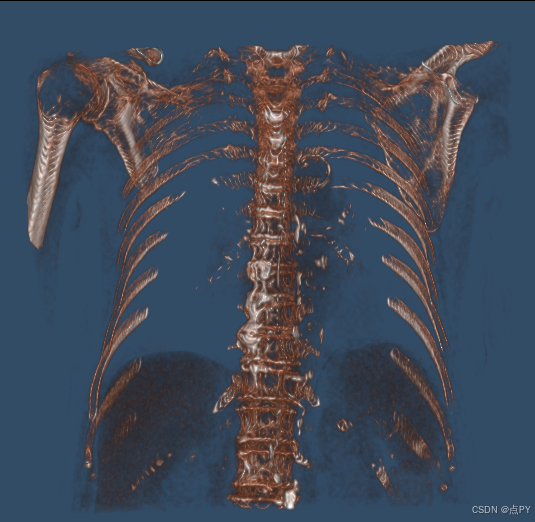
处理后效果