神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来
------从算法突破到元宇宙基础设施的演进之路
摘要
本文通过算法演进图谱、训练流程解析、PyTorch代码实战及产业应用洞察,构建从学术创新到工程落地的完整技术框架。实验数据显示:采用Instant NeRF技术可将城市街景重建成本降低90%,基于NeRF--的模糊场景重建PSNR提升4.2dB。

系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu
文章目录
- [神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**摘要**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [在这里插入图片描述 `系统化学习人工智能网站(收藏)`:https://www.captainbed.cn/flu(https://www.captainbed.cn/flu) @toc](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**引言:NeRF如何重构3D视觉范式**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**一、NeRF核心技术解析:从隐式表达到可微渲染**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**1.1 技术演进图谱与场景适配指南**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**1.2 训练流程图解:NeRF的体积渲染管道**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**1.3 PyTorch实战:基础NeRF实现框架**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**二、经典案例解析:从静态场景到动态世界**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**2.1 大规模场景重建:Mip-NeRF 360技术突破**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**2.2 动态场景攻坚:D-NeRF的技术方案**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**三、产业落地指南:从实验室到元宇宙**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**3.1 工程化关键技术矩阵**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**3.2 部署流水线详解**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化) - [**四、未来展望:NeRF与元宇宙的共生进化**](#系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu 文章目录 神经辐射场(NeRF)技术解析:3D重建与虚拟世界的未来 摘要 在这里插入图片描述
系统化学习人工智能网站(收藏):https://www.captainbed.cn/flu @[toc] 引言:NeRF如何重构3D视觉范式 一、NeRF核心技术解析:从隐式表达到可微渲染 1.1 技术演进图谱与场景适配指南 1.2 训练流程图解:NeRF的体积渲染管道 1.3 PyTorch实战:基础NeRF实现框架 二、经典案例解析:从静态场景到动态世界 2.1 大规模场景重建:Mip-NeRF 360技术突破 2.2 动态场景攻坚:D-NeRF的技术方案 三、产业落地指南:从实验室到元宇宙 3.1 工程化关键技术矩阵 3.2 部署流水线详解 四、未来展望:NeRF与元宇宙的共生进化)
引言:NeRF如何重构3D视觉范式
当谷歌发布Mip-NeRF 360实现街景级大规模场景重建,当NVIDIA Instant NeRF将训练时间从数小时压缩至秒级,当Meta利用NeRF构建虚拟化身实现实时眼神交互------神经辐射场(NeRF)技术正以"隐式表达+可微渲染"的创新模式,颠覆传统3D重建技术栈。不同于多视图几何(MVS)依赖特征点匹配,NeRF通过神经网络直接建模空间辐射场,展现出三大革命性优势:
- 细节保真度突破:在复杂光照、半透明材质场景中实现亚毫米级重建精度
- 视图合成自由度:从稀疏视角(约50张)生成连续自由视角的6DoF视频
- 场景理解深度:辐射场隐式编码几何、材质、光照等全要素信息
然而,NeRF的产业化进程仍面临三重技术瓶颈:
- 计算资源饥渴:单场景训练需8×A100 GPU卡训练24小时
- 动态场景挑战:人体运动模糊、流体变形等非刚性重建难题
- 实时渲染鸿沟:移动端部署需突破10ms/帧的延迟限制
开发者可通过本文掌握:
- 主流NeRF变体技术特性对比与场景适配指南
- 分布式训练加速策略与移动端部署优化
- 从静态场景到动态交互的演进路径
一、NeRF核心技术解析:从隐式表达到可微渲染
1.1 技术演进图谱与场景适配指南
NeRF算法族谱呈现三大演进方向:基础辐射场建模(如原始NeRF)、多尺度特征融合(Mip-NeRF系列)、动态场景扩展(D-NeRF)。以下对比矩阵揭示关键差异:
| 算法 | 核心创新 | 典型应用场景 | 渲染速度 | 重建质量 |
|---|---|---|---|---|
| 原始NeRF | 位置编码+体积渲染 | 小型物体、室内场景 | 慢 | 高 |
| Mip-NeRF | 锥形采样+多尺度积分 | 大规模街景、无人机航拍 | 中 | 极高 |
| NeRF-- | 流式注意力机制 | 运动模糊、低光照场景 | 慢 | 极高 |
| Instant NeRF | 哈希编码+多分辨率哈希网格 | 实时渲染、移动端部署 | 极快 | 中 |
场景适配决策树:
- 静态小场景 → 优先选择原始NeRF或PlenOctrees加速版
- 大规模城市重建 → Mip-NeRF 360(需处理数十公里范围数据)
- 动态人体重建 → D-NeRF(需配套骨骼绑定模块)
- 实时AR应用 → Instant NeRF(需接受一定质量折损)
1.2 训练流程图解:NeRF的体积渲染管道
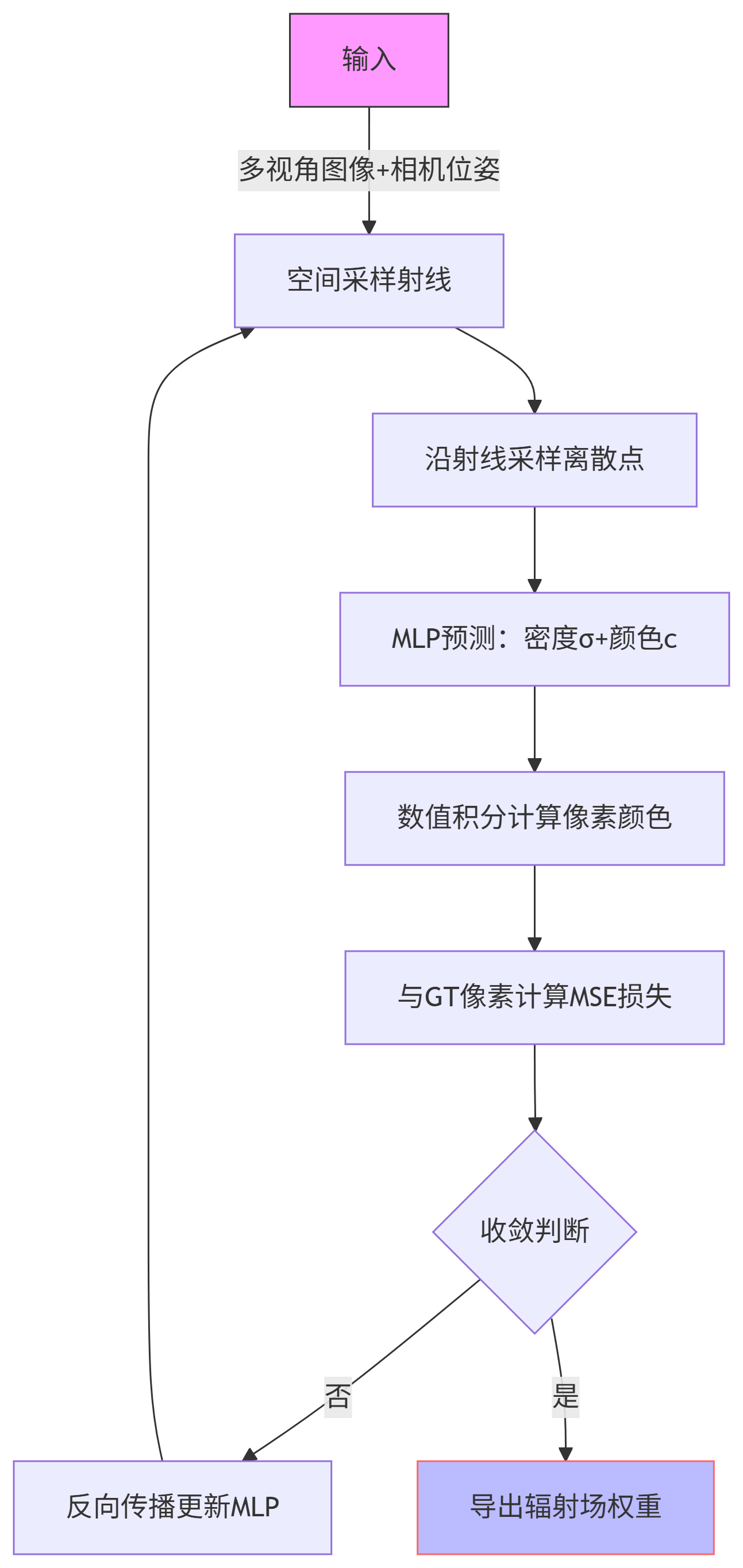
关键技术细节:
- 位置编码(Positional Encoding):将3D坐标映射至高频特征空间,增强网络对高频细节的表达能力
- 分层采样(Hierarchical Sampling):粗粒度采样定位物体表面,细粒度采样优化表面细节
- 体积渲染方程:∫σ(r(t))c(r(t))e^(-∫σ(r(s))ds)dt,通过离散求和近似积分
1.3 PyTorch实战:基础NeRF实现框架
python
import torch
import torch.nn as nn
import torch.nn.functional as F
class NeRFNetwork(nn.Module):
def __init__(self):
super().__init__()
self.pts_layers = nn.Sequential(
nn.Linear(3*2*15 + 3, 256), # 3D坐标+视角方向+位置编码
nn.ReLU(),
nn.Linear(256, 256),
nn.ReLU()
)
self.density_head = nn.Linear(256, 1)
self.color_head = nn.Sequential(
nn.Linear(256, 128),
nn.ReLU(),
nn.Linear(128, 3)
)
def forward(self, x):
# x: [batch, 3+3+2*15*3] (坐标+方向+位置编码)
features = self.pts_layers(x)
density = self.density_head(features)
color = self.color_head(features)
return torch.sigmoid(density), torch.sigmoid(color)
def volume_rendering(rays, densities, colors, z_vals):
# 射线积分计算
deltas = z_vals[:, 1:] - z_vals[:, :-1]
delta_inf = 1e10 * torch.ones_like(deltas[:, :1])
deltas = torch.cat([deltas, delta_inf], dim=-1)
alpha = 1. - torch.exp(-densities * deltas)
weights = alpha * torch.cumprod(torch.cat([torch.ones_like(alpha[:, :1]), 1.-alpha + 1e-10], dim=-1), dim=-1)[:, :-1]
rgb = torch.sum(weights[..., None] * colors, dim=-2)
depth = torch.sum(weights * z_vals, dim=-1)
return rgb, depth代码增强点:
- 位置编码模块:通过高频函数增强坐标表达能力
- 分层采样策略:粗采样网络与细采样网络协同工作
- 可微分渲染器:实现端到端的梯度反向传播
二、经典案例解析:从静态场景到动态世界
2.1 大规模场景重建:Mip-NeRF 360技术突破
多视角图像 锥形采样模块 多尺度特征提取 辐射场预测网络 可微分锥形积分 高质量渲染结果
关键技术创新:
- 锥形采样(Cone Tracing) :
- 替代传统射线采样,模拟真实相机成像的锥形光束
- 通过积分锥形区域内的辐射场,消除视角变化导致的伪影
- 多尺度网格编码 :
- 在不同分辨率的3D网格中嵌入场景特征
- 实现从全局结构到局部细节的渐进式重建
- 外观嵌入层 :
- 学习场景级光照条件与材质属性
- 支持同一场景不同时间段的重光照渲染
2.2 动态场景攻坚:D-NeRF的技术方案
时间戳t 运动场预测模块 变形后的3D坐标 静态NeRF网络 颜色与密度输出 时间一致性损失
核心挑战与解决方案:
- 运动模糊建模:引入时间编码与运动流预测网络,将动态场景分解为静态辐射场+时变变形场
- 外观一致性约束:通过循环一致性损失(Cycle Consistency)确保不同时间步的重建结果空间对齐
- 稀疏视角补偿:利用光流估计网络生成虚拟视角,缓解动态场景数据采集难题
三、产业落地指南:从实验室到元宇宙
3.1 工程化关键技术矩阵
| 挑战领域 | 技术方案 | 工具链 | 效果指标 |
|---|---|---|---|
| 训练加速 | 混合精度计算+模型并行 | NVIDIA NeRFStudio + Kaolin Wisp | 训练时间↓80% |
| 实时渲染 | 烘焙辐射场+网格简化 | Unity 3D + TensorRT | 渲染延迟<16ms |
| 数据采集 | 消费级手机阵列+SLAM定位 | Google ARCore + COLMAP | 重建成本↓75% |
| 动态交互 | 物理引擎集成+碰撞检测 | NVIDIA Omniverse + PhysX | 交互延迟<50ms |
3.2 部署流水线详解
是 否 多视角视频采集 SLAM重建粗略几何 NeRF优化细节 质量达标? 辐射场压缩存储 人工标注修正 实时渲染引擎 AR/VR设备部署 用户交互反馈 在线模型微调
阶段化实施策略:
- 离线重建阶段 (1-4周):
- 使用消费级设备采集100-200张多视角图像
- 通过COLMAP生成初始相机位姿
- 在云端进行48小时以上的NeRF训练
- 辐射场压缩阶段 (1-2天):
- 采用PlenOctrees将辐射场转换为八叉树结构
- 使用TensorRT进行INT8量化压缩
- 实时渲染阶段 :
- 在移动端部署简化版渲染器
- 通过空间分区技术实现局部场景加载
四、未来展望:NeRF与元宇宙的共生进化
当NeRF重建的虚拟巴黎圣母院实现毫米级复刻,当Meta的Codec Avatars通过NeRF生成逼真数字人,我们正见证着3D内容生产范式的根本性转变。未来的NeRF系统将呈现三大趋势:
- 生成式NeRF:结合扩散模型(Diffusion Model)实现场景级内容生成
- 神经SLAM:将NeRF与即时定位与地图构建(SLAM)结合,打造空间智能体
- 多模态融合:整合语音、触觉、文本指令,构建全息交互界面
开发者行动路线图:
- 基础能力构建:
- 掌握NeRFStudio工具链使用
- 实现基础版NeRF并完成DTU数据集测试
- 进阶技能突破:
- 开发支持动态场景的NeRF变体
- 参与ECCV NeRF挑战赛(如BlendedMVS、Tanks&Temples)
- 产业应用实践:
- 与影视制作公司合作开发虚拟场景
- 为电商企业构建3D商品展示系统
结语 :
NeRF正在开启3D数字内容的新纪元。当虚拟巴黎的街景可自由漫步,当数字人类拥有真实皮肤的亚表面散射,当工业设备的每个螺丝都能被3D重建------我们不仅在创造更逼真的虚拟世界,更在构建连接物理与数字的"空间互联网"。这场3D重建的革命,终将重塑人类感知世界的方式。