一、📌 引言
在使用 3D Gaussian Splatting(3DGS)进行三维重建和可视化的过程,SIBR_gaussianViewer_app 是一款官方推荐的本地可视化工具,允许我们在 GPU 上实时浏览重建结果。然而,许多用户在启动该工具时,会遇到如下报错:
而且可视化界面会闪退,该错误虽简单,却阻碍了整个可视化流程的展开。本文将基于实际案例,详细解析错误成因,并提供一个无需改代码即可成功运行的实战级解决方案
二、🧠 报错溯源分析
运行如下命令:
bash
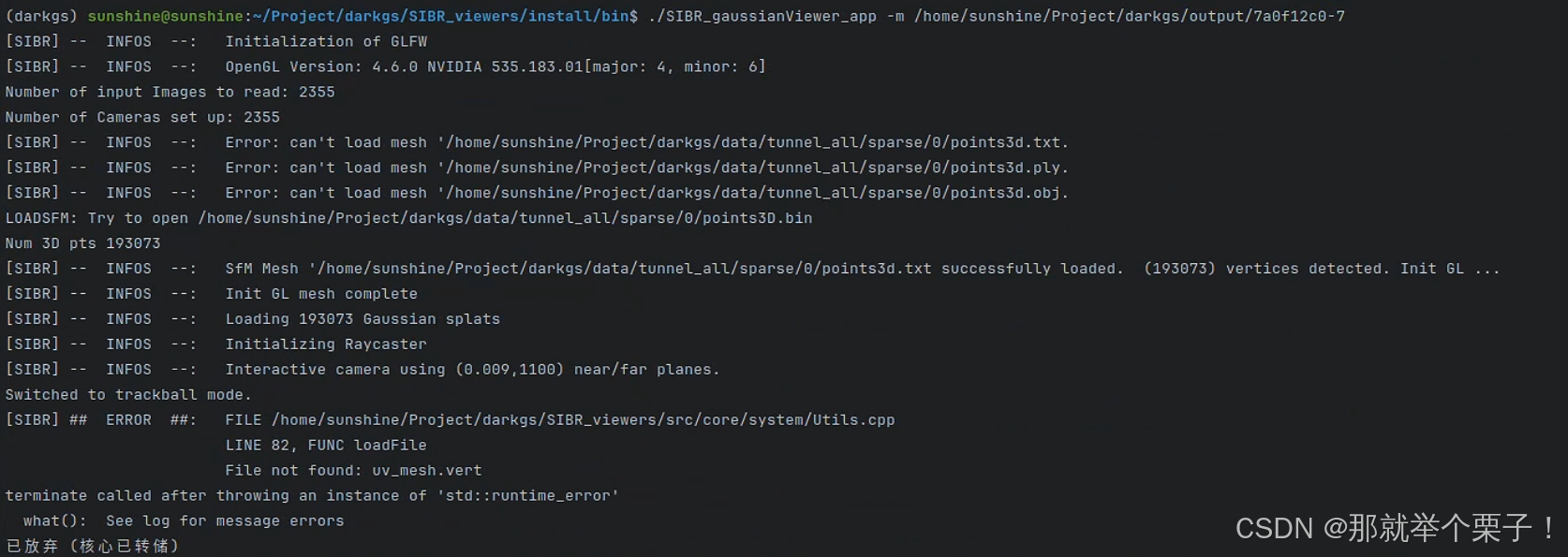
./SIBR_gaussianViewer_app -m /home/sunshine/Project/darkgs/output/7a0f12c0-7出现日志信息:
bash
[SIBR] ## ERROR ##: FILE .../Utils.cpp
LINE 82, FUNC loadFile
File not found: uv_mesh.vert
terminate called after throwing an instance of 'std::runtime_error'这表明程序在尝试加载 GLSL 着色器 uv_mesh.vert 文件时失败,触发异常崩溃。
在日志中,我们可以看到以下关键线索:
正确加载了 COLMAP 的 SfM 数据(例如 points3D.bin);
成功读取了高斯点(193073 个);
初始化 OpenGL 过程也未报错;
最后失败点为:尝试加载 uv_mesh.vert 着色器失败,触发 C++ 层的异常,导致程序崩溃。
这一错误本质上是 SIBR 框架依赖某些 GLSL 着色器文件未找到,其核心由如下函数触发:
bash
std::string loadFile(const std::string &filename) {
std::ifstream file(filename);
if (!file.is_open())
throw std::runtime_error("File not found: " + filename);
...
}三、🎯根本原因分析
SIBR 使用 OpenGL 渲染高斯点云时,需要加载多个着色器文件(例如 .vert, .frag 等),但程序使用的是 相对路径加载资源文件,默认在可执行文件当前路径下寻找 shaders/core/uv_mesh.vert。
因此,如果你直接在 install/bin/ 下运行程序,而当前路径下没有 shaders/ 文件夹或着色器文件,就会导致加载失败。
四、✅解决方案
SIBR_gaussianViewer_app 在加载 shader 时 直接从"当前工作目录"拿裸文件名,不会去读 SIBR_PATH。
所以只要执行时所在的目录里没有 uv_mesh.vert 就会崩溃 ------ 环境变量已经对,但程序根本没去用它。
官方 issue #508 给的办法:
让 工作目录 指向 shader 文件夹,或把 shader 扔到可执行旁边。
bash
# 进入 shader 目录当工作目录
cd ~/Project/darkgs/SIBR_viewers/install/shaders/core
# 从这里启动 Viewer(相对路径回到 bin)
../../../bin/SIBR_gaussianViewer_app \
-m /home/sunshine/Project/darkgs/output/RNN-0.1
路径解释:
../../../ = 从 shaders/core → shaders → install → bin。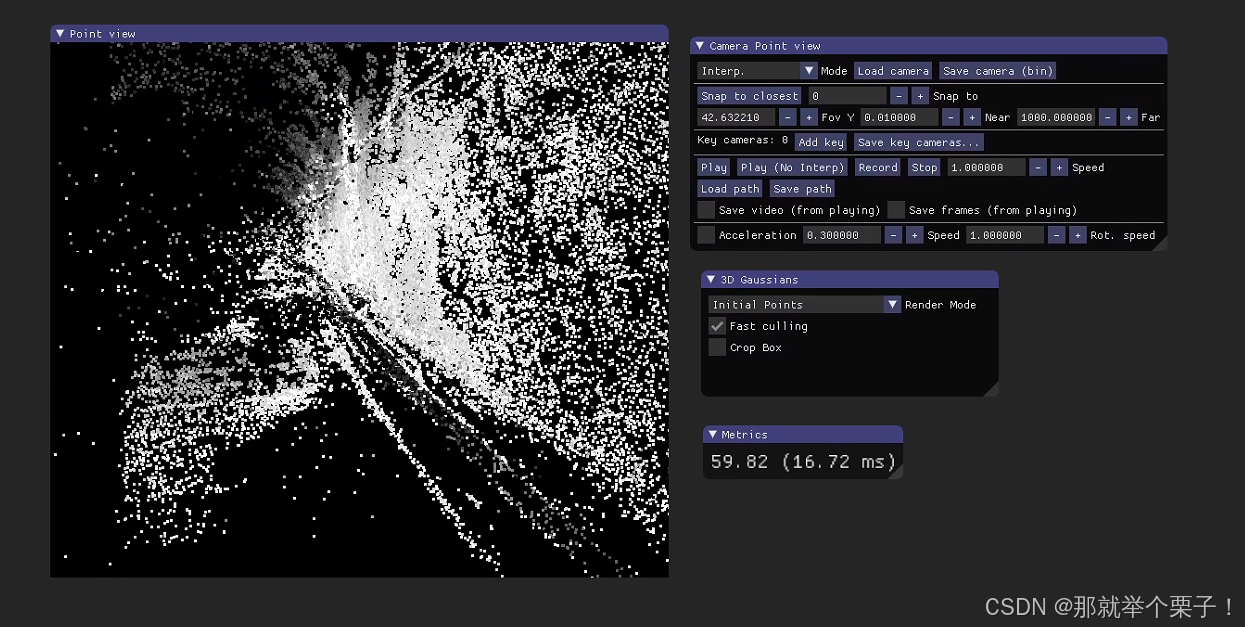
执行完毕就可以正常可视化了!
五、✅ 方案 A:建立软链接其他方案可选(便于后续使用)
方案 A:建立软链接
bash
ln -s ~/Project/darkgs/SIBR_viewers/install/shaders ~/Project/darkgs/SIBR_viewers/install/bin/shaders
cd ~/Project/darkgs/SIBR_viewers/install/bin
./SIBR_gaussianViewer_app -m ...方案 B:设置环境变量(部分版本支持)
bash
export SIBR_RESOURCE_PATH=~/Project/darkgs/SIBR_viewers/install/shaders
./SIBR_gaussianViewer_app -m ...SIBR 在某些版本中支持通过该变量设置资源路径,适用于自动化脚本运行场景。
六、总结与建议
一句话总结: 该报错并非缺少文件,而是路径未对齐,调整运行目录即可解决。
📌 核心结论:
报错 uv_mesh.vert 缺失源于路径问题;
推荐在包含 shaders/core/ 的目录中运行程序;
也可通过软链接或环境变量方式规避路径问题。
🛠 建议:
可写入一个运行脚本 run_viewer.sh,自动设置路径;
若部署跨设备使用,务必将 shaders/ 文件夹随模型一同打包。