KUKA机器人在首次开机启动时,有时在示教器上需要进行投入运行等相关的设置。如以下相关的信息需要处理:
1、机器人系统开机后,选择T1运行模式;2、显示提示信息:"RDC 存储器和控制系统不一致什么被更换了"时,点击"机器人"确认;
3、显示提示信息:"网络配置已还原",点击"全部OK"确认,消除提示信息。
4、如还有以下信息无法确认:
①KSS15068 安全配置的校验总和不正确。
②KSS12017 未确认操作人员防护装置。
③ KSS00404 安全停止。
这些处理方法:①登录安全维护人员权限;
②在【主菜单】-【配置】-【安全配置】下,做安全配置进行消除。
5、切换用户组,登录安全维护人员后;
6、按下主菜单按键,再选择配置---安全配置,出现需要选择的列表:
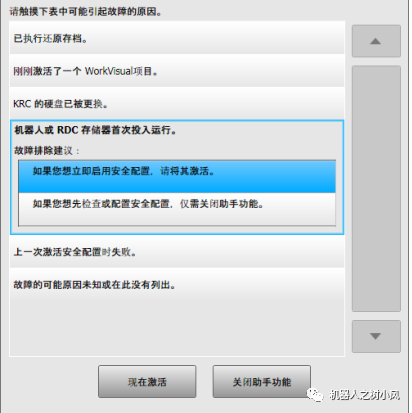
7、在列表中选择:机器人或RDC存储器首次投入运行。
8、选择"现在激活",示教器重启后,安全配置结束,相关报警消除。
如有遇到其他报警信息,可以私信提供帮助。