在上一篇用状态变量根据超稳定性理论设计模型参考自适应系统,利用状态变量进行MRACS设计,这就要求状态变量都可以得到,然而并不是所有系统状态方程都可观。因此,本文从输入输出形式根据超稳定性理论设计MRACS。
1、系统介绍
我们知道输入输出形式,在自适应率中除了引入输入输出变量本身,还会引入其各阶导数,这会降低系统的抗干扰能力。为了克服这一缺点,在系统中引入状态变量滤波器,由这个滤波器提供相应的各阶导数。
根据有无状态变量滤波器和其所在位置,可以分为以下三种情况:
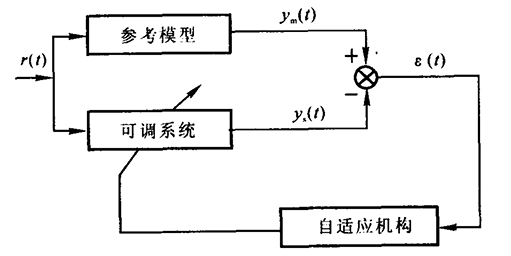
(1)无状态变量滤波器
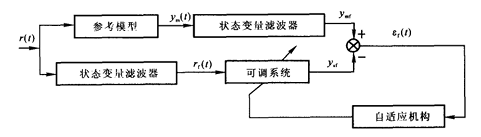
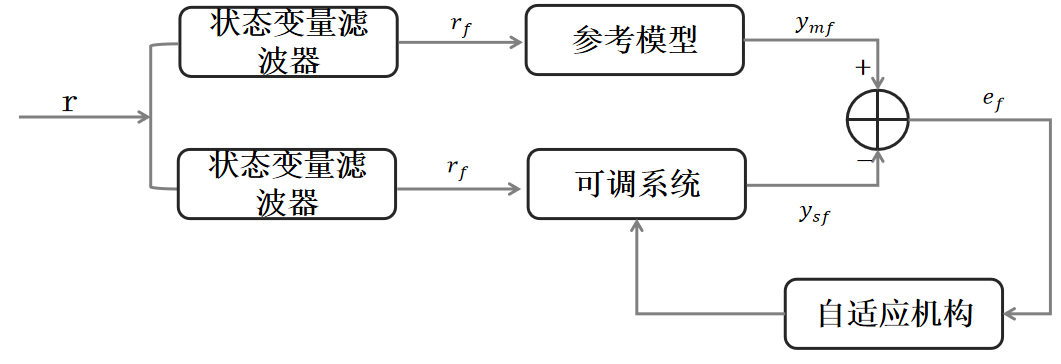
(2)在可调系统输入端和参考模型输出端放置状态变量滤波器
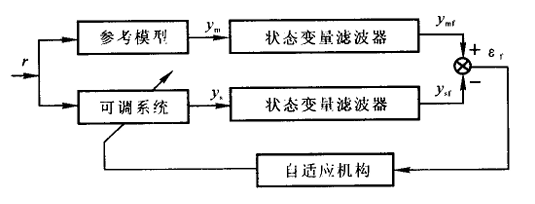
(3)在参考模型和可调系统输出端放置状态变量滤波器
下面就以上三种结构进行自适应率设计。
2、自适应律设计
2.1 无状态变量滤波器
参考模型方程为
( ∑ i = 0 n a m i p i ) y m = ( ∑ i = 0 m b m i p i ) r , a m n = 1 (1) \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)y_m=(\sum_{i=0}^{m}b_{mi}p^i)r, \quad a_{mn}=1 \tag{1} \end{array} (∑i=0namipi)ym=(∑i=0mbmipi)r,amn=1(1)
可调系统方程为
( ∑ i = 0 n a s i p i ) y s = ( ∑ i = 0 m b s i p i ) r , a s n = 1 (2) \begin{array}{c} (\sum_{i=0}^{n}a_{si}p^i)y_s=(\sum_{i=0}^{m}b_{si}p^i)r, \quad a_{sn}=1 \tag{2} \end{array} (∑i=0nasipi)ys=(∑i=0mbsipi)r,asn=1(2)
定义广义输出误差为
e = y m − y s (3) \begin{array}{c} e=y_m-y_s \tag{3} \end{array} e=ym−ys(3)
串联补偿器方程为
v = D ( p ) e = ( ∑ i = 0 n − 1 d i p i ) e (4) \begin{array}{c} v=D(p)e=(\sum_{i=0}^{n-1}d_{i}p^i)e \tag{4} \end{array} v=D(p)e=(∑i=0n−1dipi)e(4)
由 e q ( 1 , 2 , 3 ) eq(1,2,3) eq(1,2,3)可得
( ∑ i = 0 n a m i p i ) ( y m − y s ) = ∑ i = 0 m ( b m i − b s i ) p i r + ∑ i = 0 n ( a s i − a m i ) p i y s ( ∑ i = 0 n a m i p i ) e = ∑ i = 0 n ( a s i − a m i ) p i y s + ∑ i = 0 m ( b m i − b s i ) p i r (5) \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)(y_m-y_s)=\\sum_{i=0}\^{m}(b_{mi}-b_{si})p\^ir+\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_s\\\\ (\sum_{i=0}^{n}a_{mi}p^i)e=\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_s+\\sum_{i=0}\^{m}(b_{mi}-b_{si})p\^ir \tag{5} \end{array} (∑i=0namipi)(ym−ys)=∑i=0m(bmi−bsi)pir+∑i=0n(asi−ami)piys(∑i=0namipi)e=∑i=0n(asi−ami)piys+∑i=0m(bmi−bsi)pir(5)
将其拆分为一个线性前向回路和一个非线性反馈回路。
线性前向回路:
( ∑ i = 0 n a m i p i ) e = w 1 (6) \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)e=w_1 \tag{6} \end{array} (∑i=0namipi)e=w1(6)
非线性反馈回路:
w = − w 1 = ∑ i = 0 n ( a m i − a s i ) p i y s + ∑ i = 0 m ( b s i − b m i ) p i r (7) \begin{array}{c} w=-w_1=\\sum_{i=0}\^{n}(a_{mi}-a_{si})p\^iy_s+\\sum_{i=0}\^{m}(b_{si}-b_{mi})p\^ir \tag{7} \end{array} w=−w1=∑i=0n(ami−asi)piys+∑i=0m(bsi−bmi)pir(7)
这里依然采用比例+积分的调节规律,即
a s i ( v , t ) = ∫ 0 t φ 1 i ( v , t , τ ) d τ + φ 2 i ( v , t ) + a s i ( 0 ) , i = 0 , 1 , ⋯ , n − 1 b s i ( v , t ) = ∫ 0 t ψ 1 i ( v , t , τ ) d τ + ψ 2 i ( v , t ) + b s i ( 0 ) , i = 0 , 1 , ⋯ , m (8) \begin{array}{c} a_{si}(v,t)=\int_{0}^{t}\varphi_{1i}(v,t,\tau)d\tau + \varphi_{2i}(v,t)+a_{si}(0),\quad i=0,1,\cdots,n-1\\ b_{si}(v,t)=\int_{0}^{t}\psi_{1i}(v,t,\tau)d\tau + \psi_{2i}(v,t)+b_{si}(0),\quad i=0,1,\cdots,m \tag{8} \end{array} asi(v,t)=∫0tφ1i(v,t,τ)dτ+φ2i(v,t)+asi(0),i=0,1,⋯,n−1bsi(v,t)=∫0tψ1i(v,t,τ)dτ+ψ2i(v,t)+bsi(0),i=0,1,⋯,m(8)
将 e q ( 8 ) eq(8) eq(8)代入 e q ( 7 ) eq(7) eq(7)可得
w = − w 1 = − ∑ i = 0 n ( a s i − a m i ) p i y s + ∑ i = 0 n ( b s i − b m i ) p i r = − ∑ i = 0 n − 1 ( ∫ 0 t φ 1 i ( v , t , τ ) d τ + φ 2 i ( v , t ) + a s i ( 0 ) − a m i ) p i y s + ∑ i = 0 m ( ∫ 0 t ψ 1 i ( v , t , τ ) d τ + ψ 2 i ( v , t ) + b s i ( 0 ) − b m i ) p i r (9) \begin{array}{c} w=-w_1=-\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_s+\\sum_{i=0}\^{n}(b_{si}-b_{mi})p\^ir\\ =-\\sum_{i=0}\^{n-1}(\\int_{0}\^{t}\\varphi_{1i}(v,t,\\tau)d\\tau + \\varphi_{2i}(v,t)+a_{si}(0)-a_{mi})p\^iy_s \\+\\sum_{i=0}\^{m}(\\int_{0}\^{t}\\psi_{1i}(v,t,\\tau)d\\tau + \\psi_{2i}(v,t)+b_{si}(0)-b_{mi})p\^ir \tag{9} \end{array} w=−w1=−∑i=0n(asi−ami)piys+∑i=0n(bsi−bmi)pir=−∑i=0n−1(∫0tφ1i(v,t,τ)dτ+φ2i(v,t)+asi(0)−ami)piys+∑i=0m(∫0tψ1i(v,t,τ)dτ+ψ2i(v,t)+bsi(0)−bmi)pir(9)
自适应系统框图为
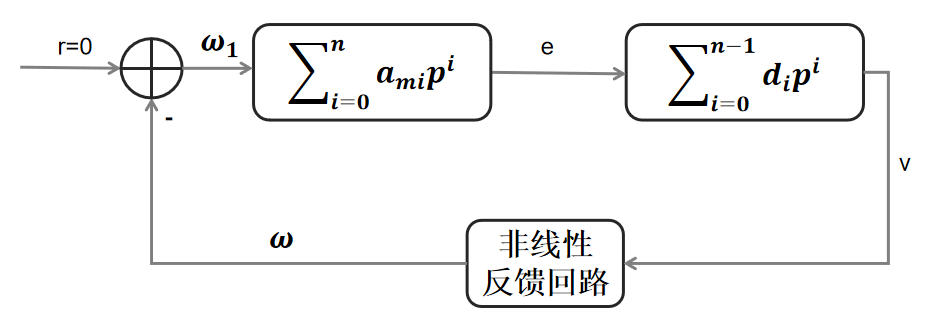
前向回路传递函数为
h ( s ) = ∑ i = 0 n − 1 d i s i s n + ∑ i = 0 n − 1 a m i s i (10) \begin{array}{c} h(s)=\frac{\sum_{i=0}^{n-1}d_{i}s^i}{s^n+\sum_{i=0}^{n-1}a_{mi}s^i} \tag{10} \end{array} h(s)=sn+∑i=0n−1amisi∑i=0n−1disi(10)
由超稳定性理论可得,前向传递函数 h ( s ) h(s) h(s)要严格正实。
非线性反馈部分,满足波波夫积分不等式:
η ( 0 , t 1 ) = ∫ 0 t 1 v ( t ) w ( t ) d t ≥ − r 0 2 , t 1 > 0 (11) \begin{array}{c} \eta(0,t_1)=\int_{0}^{t_1}v(t)w(t)dt\ge -r^2_0,\quad t_1>0 \tag{11} \end{array} η(0,t1)=∫0t1v(t)w(t)dt≥−r02,t1>0(11)
可得自适应规律为
φ 1 i = − k a i ( t − τ ) v ( τ ) p i y s ( τ ) , τ ⩽ t , i = 0 , 1 , ⋯ , n − 1 φ 2 i = − k a i ′ ( t ) v ( t ) p i y s ( t ) , i = 0 , 1 , ⋯ , n − 1 ψ 1 i = k b i ( t − τ ) v ( τ ) p i r ( τ ) , τ ⩽ t , i = 0 , 1 , ⋯ , m ψ 2 i = k b i ′ ( t ) v ( t ) p i r ( t ) , i = 0 , 1 , ⋯ , m (12) \begin{aligned} & \varphi_{1i}=-k_{ai}\left(t-\tau\right)v\left(\tau\right)p^{i}y_{s}\left(\tau\right),\quad\tau\leqslant t,\quad i=0,1,\cdots,n-1 \\ & \varphi_{2i}=-k_{ai}^{\prime}\left(t\right)v\left(t\right)p^{i}y_{s}\left(t\right),\quad i=0,1,\cdots,n-1 \\ & \psi_{1i}=k_{bi}\left(t-\tau\right)v\left(\tau\right)p^{i}r\left(\tau\right),\quad\tau\leqslant t,\quad i=0,1,\cdots,m\\ & \psi_{2i}=k_{bi}'\left(t\right)v\left(t\right)p^{i}r\left(t\right),\quad \quad i=0,1,\cdots,m \tag{12} \end{aligned} φ1i=−kai(t−τ)v(τ)piys(τ),τ⩽t,i=0,1,⋯,n−1φ2i=−kai′(t)v(t)piys(t),i=0,1,⋯,n−1ψ1i=kbi(t−τ)v(τ)pir(τ),τ⩽t,i=0,1,⋯,mψ2i=kbi′(t)v(t)pir(t),i=0,1,⋯,m(12)
其中, k a i ( t − τ ) , k b i ( t − τ ) k_{ai}\left(t-\tau\right),k_{bi}\left(t-\tau\right) kai(t−τ),kbi(t−τ)为正定积分核,它们的拉普拉斯变换在 s = 0 s=0 s=0处有一极点的正实传递函数; k a i ′ , k b i ′ k_{ai}^{\prime},k_{bi}' kai′,kbi′对于任意 t ≥ 0 t\ge 0 t≥0均有非负增益。
参照上一篇来理解这几个公式(这里解释一下为什么 φ 1 i , φ 2 i \varphi_{1i},\varphi_{2i} φ1i,φ2i带一个负号:因为 e q ( 9 ) eq(9) eq(9)中,第一项前面有符号,而上一篇的推导中是正的,因此这里要带一个负号)。
通过 e q ( 12 ) eq(12) eq(12)我们可以看到,自适应律中带有输入的导数,这实现起来很困难,因此有了后面的两种情况(引入状态变量滤波器)。
2.2 在可调系统输入端和参考模型输出端放置状态变量滤波器
系统参考模型方程 e q ( 1 ) eq(1) eq(1)、可调系统模型方程 e q ( 2 ) eq(2) eq(2)和串联补偿器方程 e q ( 4 ) eq(4) eq(4)与情况一完全相同,定义广义误差方程为
e f = y m f − y s f \begin{array}{c} e_f=y_{mf}-y_{sf} \end{array} ef=ymf−ysf
状态变量滤波器方程为
C ( p ) = ( ∑ i = 0 n − 1 c i p i ) (13) \begin{array}{c} C(p)=(\sum_{i=0}^{n-1}c_ip^i) \tag{13} \end{array} C(p)=(∑i=0n−1cipi)(13)
将状态变量滤波器和参考模型位置互换(如果是线性定常系统交换位置不影响输出 y m f y_{mf} ymf),结构如下
推导方式和情况一相同,其中根据 e q ( 5 ) eq(5) eq(5)可得
( ∑ i = 0 n a m i p i ) ( y m f − y s f ) = ∑ i = 0 m ( b m i − b s i ) p i r f + ∑ i = 0 n ( a s i − a m i ) p i y s f ( ∑ i = 0 n a m i p i ) e f = ∑ i = 0 n ( a s i − a m i ) p i y s f + ∑ i = 0 m ( b m i − b s i ) p i r f \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)(y_{mf}-y_{sf})=\\sum_{i=0}\^{m}(b_{mi}-b_{si})p\^ir_f+\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_{sf}\\\\ (\sum_{i=0}^{n}a_{mi}p^i)e_f=\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_{sf}+\\sum_{i=0}\^{m}(b_{mi}-b_{si})p\^ir_f \end{array} (∑i=0namipi)(ymf−ysf)=∑i=0m(bmi−bsi)pirf+∑i=0n(asi−ami)piysf(∑i=0namipi)ef=∑i=0n(asi−ami)piysf+∑i=0m(bmi−bsi)pirf
线性前向回路:
( ∑ i = 0 n a m i p i ) e f = w 1 \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)e_f=w_1 \end{array} (∑i=0namipi)ef=w1
非线性反馈回路:
w = − w 1 = − ∑ i = 0 n ( a s i − a m i ) p i y s f + ∑ i = 0 m ( b s i − b m i ) p i r f \begin{array}{c} w=-w_1=-\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_{sf}+\\sum_{i=0}\^{m}(b_{si}-b_{mi})p\^ir_f \end{array} w=−w1=−∑i=0n(asi−ami)piysf+∑i=0m(bsi−bmi)pirf
采用比例+积分的调节规律,即
a s i ( v , t ) = ∫ 0 t φ 1 i ( v , t , τ ) d τ + φ 2 i ( v , t ) + a s i ( 0 ) , i = 0 , 1 , ⋯ , n − 1 b s i ( v , t ) = ∫ 0 t ψ 1 i ( v , t , τ ) d τ + ψ 2 i ( v , t ) + b s i ( 0 ) , i = 0 , 1 , ⋯ , m \begin{array}{c} a_{si}(v,t)=\int_{0}^{t}\varphi_{1i}(v,t,\tau)d\tau + \varphi_{2i}(v,t)+a_{si}(0),\quad i=0,1,\cdots,n-1\\ b_{si}(v,t)=\int_{0}^{t}\psi_{1i}(v,t,\tau)d\tau + \psi_{2i}(v,t)+b_{si}(0),\quad i=0,1,\cdots,m \end{array} asi(v,t)=∫0tφ1i(v,t,τ)dτ+φ2i(v,t)+asi(0),i=0,1,⋯,n−1bsi(v,t)=∫0tψ1i(v,t,τ)dτ+ψ2i(v,t)+bsi(0),i=0,1,⋯,m
由 e q ( 10 ) eq(10) eq(10)可得,前向回路传递函数为
h ( s ) = ∑ i = 0 n − 1 d i s i s n + ∑ i = 0 n − 1 a m i s i h(s)=\frac{\sum_{i=0}^{n-1}d_{i}s^i}{s^n+\sum_{i=0}^{n-1}a_{mi}s^i} h(s)=sn+∑i=0n−1amisi∑i=0n−1disi
由超稳定性理论可得,前向传递函数 h ( s ) h(s) h(s)要严格正实。
由 e q ( 12 ) eq(12) eq(12)可得自适应规律为
φ 1 i = − k a i ( t − τ ) v ( τ ) p i y s f ( τ ) , τ ⩽ t , i = 0 , 1 , ⋯ , n − 1 φ 2 i = − k a i ′ ( t ) v ( t ) p i y s f ( t ) , i = 0 , 1 , ⋯ , n − 1 ψ 1 i = k b i ( t − τ ) v ( τ ) p i r f ( τ ) , τ ⩽ t , i = 0 , 1 , ⋯ , m ψ 2 i = k b i ′ ( t ) v ( t ) p i r f ( t ) , i = 0 , 1 , ⋯ , m \begin{aligned} & \varphi_{1i}=-k_{ai}\left(t-\tau\right)v\left(\tau\right)p^{i}y_{sf}\left(\tau\right),\quad\tau\leqslant t,\quad i=0,1,\cdots,n-1 \\ & \varphi_{2i}=-k_{ai}^{\prime}\left(t\right)v\left(t\right)p^{i}y_{sf}\left(t\right),\quad i=0,1,\cdots,n-1 \\ & \psi_{1i}=k_{bi}\left(t-\tau\right)v\left(\tau\right)p^{i}r_f\left(\tau\right),\quad\tau\leqslant t,\quad i=0,1,\cdots,m\\ & \psi_{2i}=k_{bi}'\left(t\right)v\left(t\right)p^{i}r_f\left(t\right),\quad \quad i=0,1,\cdots,m \end{aligned} φ1i=−kai(t−τ)v(τ)piysf(τ),τ⩽t,i=0,1,⋯,n−1φ2i=−kai′(t)v(t)piysf(t),i=0,1,⋯,n−1ψ1i=kbi(t−τ)v(τ)pirf(τ),τ⩽t,i=0,1,⋯,mψ2i=kbi′(t)v(t)pirf(t),i=0,1,⋯,m
可以看到情况二的自适应律和情况一类似,不同点在与将情况一输入的各阶导数转换为状态变量滤波器的输出的各阶导数(更容易获取)。
2.3 在参考模型和可调系统输出端放置状态变量滤波器
上面这种结构的自适应系统,适用于自适应模型跟随控制系统,也适用于自适应式状态观测器。
由参考模型方程
( ∑ i = 0 n a m i p i ) y m = ( ∑ i = 0 m b m i p i ) r , a m n = 1 \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)y_m=(\sum_{i=0}^{m}b_{mi}p^i)r, \quad a_{mn}=1 \end{array} (∑i=0namipi)ym=(∑i=0mbmipi)r,amn=1
可得,系统能观标准型状态方程为
x ˙ m = − a m , n − 1 1 ⋯ 0 ⋮ ⋮ ⋮ − a m 1 0 ⋯ 1 − a m 0 0 ⋯ 0 x m + 0 ⋮ b m m ⋮ b m 0 r = A m x m + b m r y m = c T x m = 1 0 ⋯ 0 x m = x m 1 \dot{x}{m}= \begin{bmatrix} -a{m,n-1} & 1 & \cdots & 0 \\ \vdots & \vdots & & \vdots \\ -a_{m1} & 0 & \cdots & 1 \\ -a_{m0} & 0 & \cdots & 0 \end{bmatrix}x_{m}+ \begin{bmatrix} 0 \\ \vdots \\ b_{mm} \\ \vdots \\ b_{m0} \end{bmatrix}r=A_{m}x_{m}+b_{m}r \\ y_{m}=c^{\mathrm{T}}x_{m}= \begin{bmatrix} 1 & 0 & \cdots & 0 \end{bmatrix}x_{m}=x_{m1} x˙m= −am,n−1⋮−am1−am01⋮00⋯⋯⋯0⋮10 xm+ 0⋮bmm⋮bm0 r=Amxm+bmrym=cTxm=10⋯0xm=xm1
参考模型输出端的状态变量滤波器方程为
( ∑ i = 0 n − 1 c i p i ) y m f = y m , c n − 1 = 1 (\sum_{i=0}^{n-1}c_{i}p^{i})y_{{mf}}=y_{{m}},\quad c_{n-1}=1 (i=0∑n−1cipi)ymf=ym,cn−1=1
可调系统方程为
( ∑ i = 0 n a s i p i ) y s = ( ∑ i = 0 m b s i p i ) r , a s n = 1 \begin{array}{c} (\sum_{i=0}^{n}a_{si}p^i)y_s=(\sum_{i=0}^{m}b_{si}p^i)r, \quad a_{sn}=1 \end{array} (∑i=0nasipi)ys=(∑i=0mbsipi)r,asn=1
其能观标准型状态方程为
x ˙ s = − a s , n − 1 1 ⋯ 0 ⋮ ⋮ ⋮ − a s 1 0 ⋯ 1 − a s 0 0 ⋯ 0 x s + 0 ⋮ b s m ⋮ b s 0 r + 0 u s , n − 2 ⋮ u s 0 + 0 u b , n − 2 ⋮ u b 0 x ˙ s = A s ( v , t ) x s + b s ( v , t ) r + u a ( v , t ) + u b ( v , t ) y s = c ⊺ x s = 1 0 ⋯ 0 x s = x s 1 \dot{\boldsymbol{x}}{s}= \begin{bmatrix} -a{s,n-1} & 1 & \cdots & 0 \\ \vdots & \vdots & & \vdots \\ -a_{s1} & 0 & \cdots & 1 \\ -a_{s0} & 0 & \cdots & 0 \end{bmatrix}\boldsymbol{x}{s}+ \begin{bmatrix} 0 \\ \vdots \\ b{sm} \\ \vdots \\ b_{s0} \end{bmatrix}r+ \begin{bmatrix} 0 \\ u_{s,n-2} \\ \vdots \\ u_{s0} \end{bmatrix}+ \begin{bmatrix} 0 \\ u_{b,n-2} \\ \vdots \\ u_{b0} \end{bmatrix}\\\\ \dot x_s = \boldsymbol{A}{s}(v,t)\boldsymbol{x}{s}+\boldsymbol{b}{s}(v,t)r+\boldsymbol{u}{a}(v,t)+\boldsymbol{u}{b}(v,t) \\\\ y{s}=\boldsymbol{c}^{\intercal}\boldsymbol{x}{s}= \begin{bmatrix} 1 & 0 & \cdots & 0 \end{bmatrix}\boldsymbol{x}{s}=x_{s1} x˙s= −as,n−1⋮−as1−as01⋮00⋯⋯⋯0⋮10 xs+ 0⋮bsm⋮bs0 r+ 0us,n−2⋮us0 + 0ub,n−2⋮ub0 x˙s=As(v,t)xs+bs(v,t)r+ua(v,t)+ub(v,t)ys=c⊺xs=10⋯0xs=xs1
其中, u a ( v , t ) , u b ( v , t ) u_a(v,t),u_b(v,t) ua(v,t),ub(v,t)是为了应用情况二的结论引入的附加信号。
可调系统输出端的状态变量滤波器方程为
( ∑ i = 0 n − 1 c i p i ) y s f = y s , c n − 1 = 1 (\sum_{i=0}^{n-1}c_{i}p^{i})y_{{sf}}=y_{{s}},\quad c_{n-1}=1 (i=0∑n−1cipi)ysf=ys,cn−1=1
定义广义输出误差为
e f = y m f − y s f e_f=y_{mf}-y_{sf} ef=ymf−ysf
串联补偿器方程为
v = D ( p ) e f = ( ∑ i = 0 n − 1 d i p i ) e f \begin{array}{c} v=D(p)e_f=(\sum_{i=0}^{n-1}d_{i}p^i)e_f \end{array} v=D(p)ef=(∑i=0n−1dipi)ef
根据 e q ( 5 ) eq(5) eq(5)可得
( ∑ i = 0 n a m i p i ) ( y m f − y s f ) = ∑ i = 0 m ( b m i − b s i ) p i r f + ∑ i = 0 n ( a s i − a m i ) p i y s f ( ∑ i = 0 n a m i p i ) e f = ∑ i = 0 n ( a s i − a m i ) p i y s f + ∑ i = 0 m ( b m i − b s i ) p i r f \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)(y_{mf}-y_{sf})=\\sum_{i=0}\^{m}(b_{mi}-b_{si})p\^ir_f+\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_{sf}\\\\ (\sum_{i=0}^{n}a_{mi}p^i)e_f=\\sum_{i=0}\^{n}(a_{si}-a_{mi})p\^iy_{sf}+\\sum_{i=0}\^{m}(b_{mi}-b_{si})p\^ir_f \end{array} (∑i=0namipi)(ymf−ysf)=∑i=0m(bmi−bsi)pirf+∑i=0n(asi−ami)piysf(∑i=0namipi)ef=∑i=0n(asi−ami)piysf+∑i=0m(bmi−bsi)pirf
线性前向回路:
( ∑ i = 0 n a m i p i ) e f = w 1 \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)e_f=w_1 \end{array} (∑i=0namipi)ef=w1
非线性反馈回路:
w = − w 1 = − ∑ i = 0 n ( a s i − a b i ) p i y s f + ∑ i = 0 m ( b s i − b m i ) p i r f \begin{array}{c} w=-w_1=-\\sum_{i=0}\^{n}(a_{si}-a_{bi})p\^iy_{sf}+\\sum_{i=0}\^{m}(b_{si}-b_{mi})p\^ir_f \end{array} w=−w1=−∑i=0n(asi−abi)piysf+∑i=0m(bsi−bmi)pirf
采用调节规律为:
a s i ( v , t ) = ∫ 0 t φ 1 i ( v , t , τ ) d τ + a s i ( 0 ) , i = 0 , 1 , ⋯ , n − 1 b s i ( v , t ) = ∫ 0 t ψ 1 i ( v , t , τ ) d τ + b s i ( 0 ) , i = 0 , 1 , ⋯ , m u a j = φ a j ( v , t , y s f ) , j = 0 , 1 , ⋯ , n − 2 u b j = ψ a j ( v , t , r f ) , j = 0 , 1 , ⋯ , n − 2 \begin{array}{c} a_{si}(v,t)=\int_{0}^{t}\varphi_{1i}(v,t,\tau)d\tau +a_{si}(0),\quad i=0,1,\cdots,n-1\\\\ b_{si}(v,t)=\int_{0}^{t}\psi_{1i}(v,t,\tau)d\tau+b_{si}(0),\quad i=0,1,\cdots,m\\\\ u_{aj}=\varphi_{aj}(v,t,y_{sf}),\quad j=0,1,\cdots,n-2\\\\ u_{bj}=\psi_{aj}(v,t,r_{f}),\quad j=0,1,\cdots,n-2 \end{array} asi(v,t)=∫0tφ1i(v,t,τ)dτ+asi(0),i=0,1,⋯,n−1bsi(v,t)=∫0tψ1i(v,t,τ)dτ+bsi(0),i=0,1,⋯,muaj=φaj(v,t,ysf),j=0,1,⋯,n−2ubj=ψaj(v,t,rf),j=0,1,⋯,n−2
其中 a s i ( v , t ) , b s i ( v , t ) a_{si}(v,t),b_{si}(v,t) asi(v,t),bsi(v,t)采用积分项, u a j , u b j u_{aj},u_{bj} uaj,ubj采用比例项。
为了更好的理解附加信号 u a ( v , t ) , u b ( v , t ) u_{a}(v,t),u_{b}(v,t) ua(v,t),ub(v,t)如何确定,下面先用一个二阶系统为例,然后推广到一般情况。
 注:题目中的情况一对应本文的情况二,情况二对应本文的情况三。
注:题目中的情况一对应本文的情况二,情况二对应本文的情况三。
对等式 y s = x s 1 y_s=x_{s1} ys=xs1左右两边求一阶和二阶导,可得
y ˙ s = x ˙ s 1 = − a s 1 x s 1 + x s 2 + b s 1 r y ¨ s = x ¨ s 1 = − a ˙ s 1 x s 1 − a s 1 x ˙ s 1 + x ˙ s 2 + b ˙ s 1 r + b s 1 r ˙ = − a ˙ s 1 x s 1 − a s 1 y ˙ s + ( − a s 0 x s 1 + b s 0 r + u a 0 + u b 0 ) + b ˙ s 1 r + b s 1 r ˙ = − a ˙ s 1 y s − a s 1 y ˙ s + ( − a s 0 y s + b s 0 r + u a 0 + u b 0 ) + b ˙ s 1 r + b s 1 r ˙ ⇒ y ¨ s + a s 1 y ˙ s + a s 0 y s = b s 1 r ˙ + b s 0 r − a ˙ s 1 y s + b ˙ s 1 r + u a 0 + u b 0 \dot y_s=\dot x_{s1}=-a_{s1}x_{s1}+x_{s2}+b_{s1}r \\ \ddot y_s=\ddot x_{s1}=-\dot a_{s1}x_{s1}-a_{s1}\dot x_{s1}+\dot x_{s2}+\dot b_{s1}r+b_{s1}\dot r\\ =-\dot a_{s1}x_{s1}-a_{s1}\dot y_s+(-a_{s0}x_{s1}+b_{s0}r+u_{a0}+u_{b0})+\dot b_{s1}r+b_{s1}\dot r\\ =-\dot a_{s1}y_s-a_{s1}\dot y_s+(-a_{s0}y_s+b_{s0}r+u_{a0}+u_{b0})+\dot b_{s1}r+b_{s1}\dot r \\ \Rightarrow \ddot y_s + a_{s1}\dot y_s+a_{s0}y_s=b_{s1}\\dot r+b_{s0}r-\dot a_{s1}y_s+\dot b_{s1}r+u_{a0}+u_{b0}\\ y˙s=x˙s1=−as1xs1+xs2+bs1ry¨s=x¨s1=−a˙s1xs1−as1x˙s1+x˙s2+b˙s1r+bs1r˙=−a˙s1xs1−as1y˙s+(−as0xs1+bs0r+ua0+ub0)+b˙s1r+bs1r˙=−a˙s1ys−as1y˙s+(−as0ys+bs0r+ua0+ub0)+b˙s1r+bs1r˙⇒y¨s+as1y˙s+as0ys=bs1r˙+bs0r−a˙s1ys+b˙s1r+ua0+ub0
可得
( p 2 + a s 1 p + a s 0 ) y s = ( b s 1 p + b s 0 ) r − a ˙ s 1 y s + b ˙ s 1 r + u a 0 + u b 0 (14) \begin{array}{c} (p^2+ a_{s1}p+a_{s0})y_s=(b_{s1}p+b_{s0})r-\dot a_{s1}y_s+\dot b_{s1}r+u_{a0}+u_{b0} \tag{14} \end{array} (p2+as1p+as0)ys=(bs1p+bs0)r−a˙s1ys+b˙s1r+ua0+ub0(14)
为了证明 y s f y_{sf} ysf和 y s f ′ y'{sf} ysf′是零状态等价的,只需要证明 ( p + c 0 ) y s f ′ (p+c_0)y'{sf} (p+c0)ysf′零状态等价于 y s y_s ys即可。
由情况二结构图可得
p 2 + a s 1 p + a s 0 y s f ′ = b s 1 p + b s 0 r f p\^2+ a_{s1}p+a_{s0}y_{sf}'=b_{s1}p+b_{s0}r_f p2+as1p+as0ysf′=bs1p+bs0rf
左右两边乘 ( p + c 0 ) (p+c_0) (p+c0)可得,
( p + c 0 ) p 2 + a s 1 p + a s 0 y s f ′ = ( p + c 0 ) b s 1 p + b s 0 r f ⇒ p 2 + a s 1 p + a s 0 ( p + c 0 ) y s f ′ + a ˙ s 1 ( v , t ) p y s f ′ + a ˙ s 0 y s f ′ = b s 1 p + b s 0 ( p + c 0 ) r f + b ˙ s 1 p r f + b ˙ s 0 r f (p+c_0)p\^2+ a_{s1}p+a_{s0}y_{sf}'=(p+c_0)b_{s1}p+b_{s0}r_f \\\\ \Rightarrow p\^2+ a_{s1}p+a_{s0}(p+c_0)y_{sf}' + \dot a_{s1}(v,t)py'{sf}+ \dot a{s0}y'{sf}\\\\=b_{s1}p+b_{s0}(p+c_0)r_f+ \dot b{s1}pr_f + \dot b_{s0}r_f \\ (p+c0)p2+as1p+as0ysf′=(p+c0)bs1p+bs0rf⇒p2+as1p+as0(p+c0)ysf′+a˙s1(v,t)pysf′+a˙s0ysf′=bs1p+bs0(p+c0)rf+b˙s1prf+b˙s0rf
由 ( p + c 0 ) r f = r (p+c_0)r_f=r (p+c0)rf=r可得
p 2 + a s 1 p + a s 0 ( p + c 0 ) y s f ′ = b s 1 p + b s 0 r − a ˙ s 1 p y s f ′ − a ˙ s 0 y s f ′ + b ˙ s 1 p r f + b ˙ s 0 r f (15) \begin{array}{c} p\^2+ a_{s1}p+a_{s0}(p+c_0)y_{sf}'=b_{s1}p+b_{s0}r- \dot a_{s1}py'{sf}- \dot a{s0}y'{sf} +\dot b{s1}pr_f + \dot b_{s0}r_f \tag{15} \end{array} p2+as1p+as0(p+c0)ysf′=bs1p+bs0r−a˙s1pysf′−a˙s0ysf′+b˙s1prf+b˙s0rf(15)
通过对比 e q ( 14 ) , e q ( 15 ) eq(14),eq(15) eq(14),eq(15),想要 ( p + c 0 ) y s f ′ (p+c_0)y'{sf} (p+c0)ysf′零状态等价于 y s y_s ys,则等式两边分别相等,即
− a ˙ s 1 y s + b ˙ s 1 r + u a 0 + u b 0 = − a ˙ s 1 p y s f ′ − a ˙ s 0 y s f ′ + b ˙ s 1 p r f + b ˙ s 0 r f -\dot a{s1}y_s+\dot b_{s1}r+u_{a0}+u_{b0}=- \dot a_{s1}py'{sf}- \dot a{s0}y'{sf} +\dot b{s1}pr_f + \dot b_{s0}r_f −a˙s1ys+b˙s1r+ua0+ub0=−a˙s1pysf′−a˙s0ysf′+b˙s1prf+b˙s0rf
可得
u a 0 + u b 0 = a ˙ s 1 y s − b ˙ s 1 r − a ˙ s 1 p y s f ′ − a ˙ s 0 y s f ′ + b ˙ s 1 p r f + b ˙ s 0 r f = a ˙ s 1 ( y s − p y s f ′ ) − a ˙ s 0 y s f ′ + b ˙ s 1 ( p r f − r ) + b ˙ s 0 r f u_{a0}+u_{b0}=\dot a_{s1}y_s-\dot b_{s1}r- \dot a_{s1}py'{sf}- \dot a{s0}y'{sf} +\dot b{s1}pr_f + \dot b_{s0}r_f\\ =\dot a_{s1}(y_s-py'{sf})- \dot a{s0}y'{sf}+\dot b{s1}(pr_f-r) + \dot b_{s0}r_f ua0+ub0=a˙s1ys−b˙s1r−a˙s1pysf′−a˙s0ysf′+b˙s1prf+b˙s0rf=a˙s1(ys−pysf′)−a˙s0ysf′+b˙s1(prf−r)+b˙s0rf
令
u a 0 = a ˙ s 1 ( y s − p y s f ′ ) − a ˙ s 0 y s f ′ u b 0 = b ˙ s 1 ( p r f − r ) + b ˙ s 0 r f (16) \begin{array}{c} u_{a0}=\dot a_{s1}(y_s-py'{sf})- \dot a{s0}y'{sf} \\ u{b0}=\dot b_{s1}(pr_f-r) + \dot b_{s0}r_f \tag{16} \end{array} ua0=a˙s1(ys−pysf′)−a˙s0ysf′ub0=b˙s1(prf−r)+b˙s0rf(16)
可以得到 ( p + c 0 ) y s f ′ (p+c_0)y'{sf} (p+c0)ysf′零状态等价于 y s y_s ys,利用 y s f y{sf} ysf代替 y s f ′ y_{sf}' ysf′可得
u a 0 = a ˙ s 1 c 0 p y s f − a ˙ s 0 y s f u b 0 = − b ˙ s 1 c 0 r f + b ˙ s 0 r f (17) \begin{array}{c} u_{a0}=\dot a_{s1}c_0py_{sf}- \dot a_{s0}y_{sf} \\ u_{b0}=-\dot b_{s1}c_0r_f + \dot b_{s0}r_f \tag{17} \end{array} ua0=a˙s1c0pysf−a˙s0ysfub0=−b˙s1c0rf+b˙s0rf(17)
由前面推导 e q ( 4 ) , e q ( 6 ) , e q ( 9 ) eq(4),eq(6),eq(9) eq(4),eq(6),eq(9)
( ∑ i = 0 n a m i p i ) e f = w 1 v = ( ∑ i = 0 n − 1 d i p i ) e f w = − w 1 = − ∑ i = 0 n − 1 ( ∫ 0 t φ 1 i ( v , t , τ ) d τ + φ 2 i ( v , t ) + a s i ( 0 ) − a m i ) p i y s f + ∑ i = 0 m ( ∫ 0 t ψ 1 i ( v , t , τ ) d τ + ψ 2 i ( v , t ) + b s i ( 0 ) − b m i ) p i r f \begin{array}{c} (\sum_{i=0}^{n}a_{mi}p^i)e_f=w_1 \\\\ v=(\sum_{i=0}^{n-1}d_{i}p^i)e_f \\\\ w=-w_1=-\\sum_{i=0}\^{n-1}(\\int_{0}\^{t}\\varphi_{1i}(v,t,\\tau)d\\tau + \\varphi_{2i}(v,t)+a_{si}(0)-a_{mi})p\^iy_{sf} \\+\\sum_{i=0}\^{m}(\\int_{0}\^{t}\\psi_{1i}(v,t,\\tau)d\\tau + \\psi_{2i}(v,t)+b_{si}(0)-b_{mi})p\^ir_f \end{array} (∑i=0namipi)ef=w1v=(∑i=0n−1dipi)efw=−w1=−∑i=0n−1(∫0tφ1i(v,t,τ)dτ+φ2i(v,t)+asi(0)−ami)piysf+∑i=0m(∫0tψ1i(v,t,τ)dτ+ψ2i(v,t)+bsi(0)−bmi)pirf
可得
( p 2 + a m 1 p + a m 0 ) e f = w 1 v = ( d 1 p + d 0 ) e f w = − w 1 = − ∑ i = 0 1 φ 1 i ( v , t , τ ) d τ + a s i ( 0 ) − a m i p i y s f + ∑ i = 0 1 ψ 1 i ( v , t , τ ) d τ + b s i ( 0 ) − b m i p i r f \begin{array}{c} (p^2+a_{m1}p+a_{m0})e_f=w_1\\\\ v=(d_1p+d_0)e_f \\\\ w=-w_1=-\sum_{i=0}^{1}\\varphi_{1i}(v,t,\\tau)d\\tau +a_{si}(0)-a_{mi}p^iy_{sf} \\ +\sum_{i=0}^{1}\\psi_{1i}(v,t,\\tau)d\\tau + b_{si}(0)-b_{mi}p^ir_f \end{array} (p2+am1p+am0)ef=w1v=(d1p+d0)efw=−w1=−∑i=01φ1i(v,t,τ)dτ+asi(0)−amipiysf+∑i=01ψ1i(v,t,τ)dτ+bsi(0)−bmipirf
注: a s i , b s i a_{si},b_{si} asi,bsi采用调节规律为积分项,因此 φ 2 i = ψ 2 i = 0 \varphi_{2i}=\psi_{2i}=0 φ2i=ψ2i=0。
前向回路传递函数为
h ( s ) = d 1 s + d 0 s 2 + a m 1 s + a m 0 h(s)=\frac{d_1s+d_0}{s^2+a_{m1}s+a_{m0}} h(s)=s2+am1s+am0d1s+d0
要求 h ( s ) h(s) h(s)严格正实。
由 e q ( 12 ) eq(12) eq(12)参数自适应律为
a s 1 ( t ) = − ∫ 0 t k a 1 v ( τ ) p y s f ( τ ) d τ + a s 1 ( 0 ) a s 0 ( t ) = − ∫ 0 t k a 0 v ( τ ) y s f ( τ ) d τ + a s 0 ( 0 ) b s 1 ( t ) = − ∫ 0 t k b 1 v ( τ ) p r f ( τ ) d τ + b s 1 ( 0 ) b s 0 ( t ) = − ∫ 0 t k b 0 v ( τ ) r f ( τ ) d τ + b s 0 ( 0 ) (18) \begin{array}{c} a_{s1}(t)=-\int_{0}^{t}k_{a1}v(\tau)py_{sf}(\\tau)d\tau +a_{s1}(0)\\\\ a_{s0}(t)=-\int_{0}^{t}k_{a0}v(\tau)y_{sf}(\tau)d\tau +a_{s0}(0)\\\\ b_{s1}(t)=-\int_{0}^{t}k_{b1}v(\tau)pr_{f}(\\tau)d\tau +b_{s1}(0)\\\\ b_{s0}(t)=-\int_{0}^{t}k_{b0}v(\tau)r_{f}(\tau)d\tau +b_{s0}(0)\\\\ \tag{18} \end{array} as1(t)=−∫0tka1v(τ)pysf(τ)dτ+as1(0)as0(t)=−∫0tka0v(τ)ysf(τ)dτ+as0(0)bs1(t)=−∫0tkb1v(τ)prf(τ)dτ+bs1(0)bs0(t)=−∫0tkb0v(τ)rf(τ)dτ+bs0(0)(18)
其中 k a 1 , k a 0 , k b 1 , k b 0 k_{a1},k_{a0},k_{b1},k_{b0} ka1,ka0,kb1,kb0为正实数。由 e q ( 17 ) eq(17) eq(17)可得
u a 0 = k a 0 v ( t ) y s f 2 − k a 1 v ( t ) p y s f c 0 p y s f u b 0 = k b 0 v ( t ) r f 2 − k b 1 v ( t ) p r f c 0 r f (19) \begin{array}{c} u_{a0}=k_{a0}v(t)y^2_{sf} - k_{a1}v(t)py_{sf}c_0py_{sf} \\\\ u_{b0}=k_{b0}v(t)r^2_{f} - k_{b1}v(t)pr_{f}c_0r_{f} \tag{19} \end{array} ua0=ka0v(t)ysf2−ka1v(t)pysfc0pysfub0=kb0v(t)rf2−kb1v(t)prfc0rf(19)
至此,通过该例题知道了如何确定 u a , u b u_{a},u_{b} ua,ub。
下面,通过 e q ( 18 ) , e q ( 19 ) eq(18),eq(19) eq(18),eq(19)来确定一般情况下的自适应律选择。
a s i ( t ) = − ∫ 0 t k a i ( t − τ ) v ( τ ) p i y s f ( τ ) d τ + a s i ( 0 ) , i = 0 , 1 , ⋯ , n − 1 b s i ( t ) = − ∫ 0 t k b i ( t − τ ) v ( τ ) p i r f ( τ ) d τ + b s i ( 0 ) , i = 0 , 1 , ⋯ , m (20) \begin{array}{c} a_{si}(t)=-\int_{0}^{t}k_{ai}(t-\tau)v(\tau)p^iy_{sf}(\tau)d\tau +a_{si}(0),\quad i=0,1,\cdots,n-1\\\\ b_{si}(t)=-\int_{0}^{t}k_{bi}(t-\tau)v(\tau)p^ir_{f}(\tau)d\tau +b_{si}(0),\quad i=0,1,\cdots,m\\\\ \tag{20} \end{array} asi(t)=−∫0tkai(t−τ)v(τ)piysf(τ)dτ+asi(0),i=0,1,⋯,n−1bsi(t)=−∫0tkbi(t−τ)v(τ)pirf(τ)dτ+bsi(0),i=0,1,⋯,m(20)
其中 k a i ( t − τ ) , k b i ( t − τ ) k_{ai}(t-\tau),k_{bi}(t-\tau) kai(t−τ),kbi(t−τ)为正定积分核,它们的拉普拉斯变换在 s = 0 s=0 s=0处有一极点的正实传递函数。特殊地,可以选取
k a i ( t − τ ) = k a i > 0 , t ≥ τ k b i ( t − τ ) = k b i > 0 , t ≥ τ k_{ai}(t-\tau)=k_{ai} >0,\quad t\ge \tau \\ k_{bi}(t-\tau)=k_{bi} >0,\quad t\ge \tau kai(t−τ)=kai>0,t≥τkbi(t−τ)=kbi>0,t≥τ
自适应信号为
u a j ( v , t ) = − ∑ i = 0 j a ˙ s i ( v , t ) ( p n − j − 2 + ∑ l = 0 n − 3 − j c l + 1 + j p l ) p i y s f + ∑ i = j + 1 n − 1 a ˙ s i ( v , t ) ( ∑ l = 0 j c l p l ) p i − j − 1 y s f , j = 0 , 1 , ⋯ , n − 2 u b j ( v , t ) = − ∑ i = 0 j b ˙ s i ( v , t ) ( p n − j − 2 + ∑ l = 0 n − 3 − j c l + 1 + j p l ) p i r f − ∑ i = j + 1 m b ˙ s i ( v , t ) ( ∑ l = 0 j c l p l ) p i − j − 1 r f , j = 0 , 1 , ⋯ , n − 2 (21) \begin{array}{c} u_{aj}(v,t) = -\sum_{i=0}^{j} \dot{a}{si}(v,t) (p^{n-j-2}+\sum{l=0}^{n-3-j}c_{l+1+j}p^l)p^iy_{sf}\\\\+ \sum_{i=j+1}^{n-1} \dot{a}{si}(v,t)(\sum{l=0}^{j} c_l p^{l})p^{i-j-1}y_{sf}, \quad j=0,1,\cdots,n-2 \\\\ u_{bj}(v,t) = -\sum_{i=0}^{j} \dot{b}{si}(v,t) (p^{n-j-2}+\sum{l=0}^{n-3-j}c_{l+1+j}p^l)p^ir_{f}\\\\- \sum_{i=j+1}^{m} \dot{b}{si}(v,t)(\sum{l=0}^{j} c_l p^{l})p^{i-j-1}r_{f}, \quad j=0,1,\cdots,n-2 \\ \tag{21} \end{array} uaj(v,t)=−∑i=0ja˙si(v,t)(pn−j−2+∑l=0n−3−jcl+1+jpl)piysf+∑i=j+1n−1a˙si(v,t)(∑l=0jclpl)pi−j−1ysf,j=0,1,⋯,n−2ubj(v,t)=−∑i=0jb˙si(v,t)(pn−j−2+∑l=0n−3−jcl+1+jpl)pirf−∑i=j+1mb˙si(v,t)(∑l=0jclpl)pi−j−1rf,j=0,1,⋯,n−2(21)
3、例题
此题采用情况二来设计:
通过参考模型的传递函数写出对应的微分方程为
( 0.0 8 2 p 2 + 2 × 0.08 × 0.75 p + 1 ) y m = r \begin{array}{c} (0.08^2p^2+2\times 0.08 \times 0.75 p + 1)y_m=r \end{array} (0.082p2+2×0.08×0.75p+1)ym=r
将其转为首一形式为
( p 2 + 18.75 p + 156.25 ) y m = r 0.0 8 2 \begin{array}{c} (p^2+18.75 p + 156.25)y_m=\frac{r}{0.08^2} \end{array} (p2+18.75p+156.25)ym=0.082r
参考模型输出端的状态变量滤波器方程为
( p + c 0 ) y m f = y m \begin{array}{c} (p+c_0)y_{mf}=y_m \end{array} (p+c0)ymf=ym
同理,可得控制对象的首一形式的微分方程为
( p 2 + 2 ξ 1 T 1 p + 1 T 1 2 ) y s f = k 1 T 1 2 r f \begin{array}{c} (p^2+\frac{2\xi_1}{T_1} p + \frac{1}{T_1^2})y_{sf}=\frac{k_1}{T_1^2}r_f \end{array} (p2+T12ξ1p+T121)ysf=T12k1rf
可调系统输入端的状态变量滤波器方程为
( p + c 0 ) r f = r \begin{array}{c} (p+c_0)r_{f}=r \end{array} (p+c0)rf=r
交换参考模型和状态变量滤波器位置,可得
参考模型输入端的状态变量滤波器方程为
( p + c 0 ) r f = r \begin{array}{c} (p+c_0)r_{f}=r \end{array} (p+c0)rf=r
参考模型的微分方程为
( p 2 + 18.75 p + 156.25 ) y m f = r f 0.0 8 2 \begin{array}{c} (p^2+18.75 p + 156.25)y_{mf}=\frac{r_f}{0.08^2} \end{array} (p2+18.75p+156.25)ymf=0.082rf
串联补偿器方程为
v = D ( p ) e f = ( d 1 p + d 0 ) e f \begin{array}{c} v=D(p)e_f=(d_1p+d_0)e_f \end{array} v=D(p)ef=(d1p+d0)ef
定义广义误差方程为
e f = y m f − y s f \begin{array}{c} e_f=y_{mf}-y_{sf} \end{array} ef=ymf−ysf
由 e q ( 5 ) eq(5) eq(5)可得
( p 2 + a m 1 p + a m 0 ) e f = w 1 v = ( d 1 p + d 0 ) e f w = − w 1 = − ( a s 1 − a m 1 ) p + ( a s 0 − a m 0 ) y s f + ( b s 0 − b m 0 ) ] r f \begin{array}{c} (p^2+a_{m1}p+a_{m0})e_f=w_1 \\ v=(d_1p+d_0)e_f \\ w=-w_1=-(a_{s1}-a_{m1})p+(a_{s0}-a_{m0})y_{sf}+(b_{s0}-b_{m0})]r_f \end{array} (p2+am1p+am0)ef=w1v=(d1p+d0)efw=−w1=−(as1−am1)p+(as0−am0)ysf+(bs0−bm0)]rf
可得,线性前向传递函数为
h ( s ) = d 1 s + d 0 s 2 + a m 1 s + a m 0 h(s)=\frac{d_1s+d_0}{s^2+a_{m1}s+a_{m0}} h(s)=s2+am1s+am0d1s+d0
代入 a m 1 = 18.75 , a m 0 = 156.75 a_{m1}=18.75,a_{m0}=156.75 am1=18.75,am0=156.75得
h ( s ) = d 1 s + d 0 s 2 + 18.75 s + 156.75 h(s)=\frac{d_1s+d_0}{s^2+18.75s+156.75} h(s)=s2+18.75s+156.75d1s+d0
由介绍超稳定性理论一篇中的例题可得,当 a m 1 d 1 ≥ a m 0 d 0 a_{m1}d_1 \ge a_{m0}d_0 am1d1≥am0d0时,函数 h ( s ) h(s) h(s)严格正实。因此,有
18.75 d 1 ≥ 156.75 d 0 ⇒ d 1 d 0 ≥ 8.36 18.75d_1\ge 156.75d_0 \Rightarrow \frac{d_1}{d_0}\ge 8.36 18.75d1≥156.75d0⇒d0d1≥8.36
选取自适应律为
a s i ( v , t ) = ∫ 0 t φ 1 i ( v , t , τ ) d τ + φ 2 i ( v , t ) + a s i ( 0 ) , i = 0 , 1 b s 0 ( v , t ) = ∫ 0 t ψ 10 ( v , t , τ ) d τ + ψ 20 ( v , t ) + b s 0 ( 0 ) a_{si}(v,t)=\int_{0}^{t}\varphi_{1i}(v,t,\tau)d\tau+\varphi_{2i}(v,t)+a_{si}(0),\quad i=0,1 \\ b_{s0}(v,t)=\int_{0}^{t}\psi_{10}(v,t,\tau)d\tau+\psi_{20}(v,t)+b_{s0}(0) asi(v,t)=∫0tφ1i(v,t,τ)dτ+φ2i(v,t)+asi(0),i=0,1bs0(v,t)=∫0tψ10(v,t,τ)dτ+ψ20(v,t)+bs0(0)
根据超稳定性理论可得,
φ 11 = − k a 1 ( t − τ ) v ( τ ) p y s f ( τ ) , τ ≤ t φ 10 = − k a 0 ( t − τ ) v ( τ ) y s f ( τ ) , τ ≤ t φ 21 = − k a 1 ′ ( t ) v ( t ) p y s f ( t ) φ 20 = − k a 0 ′ ( t ) v ( t ) y s f ( t ) ψ 10 = k b 0 ( t − τ ) v ( τ ) r f ( τ ) , τ ≤ t ψ 20 = k b 0 ′ ( t ) v ( t ) r f ( t ) \varphi_{11}=-k_{a1}(t-\tau)v(\tau)py_{sf}(\tau),\tau \le t \\ \varphi_{10}=-k_{a0}(t-\tau)v(\tau)y_{sf}(\tau),\tau \le t \\ \varphi_{21}=-k_{a1}'(t)v(t)py_{sf}(t) \\ \varphi_{20}=-k_{a0}'(t)v(t)y_{sf}(t) \\ \psi_{10}=k_{b0}(t-\tau)v(\tau)r_{f}(\tau),\tau \le t \\ \psi_{20}=k_{b0}'(t)v(t)r_{f}(t) \\ φ11=−ka1(t−τ)v(τ)pysf(τ),τ≤tφ10=−ka0(t−τ)v(τ)ysf(τ),τ≤tφ21=−ka1′(t)v(t)pysf(t)φ20=−ka0′(t)v(t)ysf(t)ψ10=kb0(t−τ)v(τ)rf(τ),τ≤tψ20=kb0′(t)v(t)rf(t)
其中, k a 1 ( t − τ ) , k a 0 ( t − τ ) , k b 0 ( t − τ ) k_{a1}(t-\tau),k_{a0}(t-\tau),k_{b0}(t-\tau) ka1(t−τ),ka0(t−τ),kb0(t−τ)为正定积分核,它们的拉普拉斯变换在 s = 0 s=0 s=0处有一极点的正实传递函数; k a 1 ′ ( t ) , k a 0 ′ ( t ) , k b 0 ′ ( t ) k_{a1}'(t),k_{a0}'(t),k_{b0}'(t) ka1′(t),ka0′(t),kb0′(t)对于任意 t ≥ 0 t\ge 0 t≥0均有非负标量增益。
参数设置: k a 1 ( t − τ ) = k a 0 ( t − τ ) = 2 , k b 0 ( t − τ ) = 1 k_{a1}(t-\tau)=k_{a0}(t-\tau)=2,k_{b0}(t-\tau)=1 ka1(t−τ)=ka0(t−τ)=2,kb0(t−τ)=1; k a 1 ′ ( t ) = k a 0 ′ ( t ) = k b 0 ′ ( t ) = 1 k_{a1}'(t)=k_{a0}'(t)=k_{b0}'(t)=1 ka1′(t)=ka0′(t)=kb0′(t)=1; d 0 = 1 , d 1 = 8.36 d_0=1,d_1=8.36 d0=1,d1=8.36
搭建simulink仿真为:
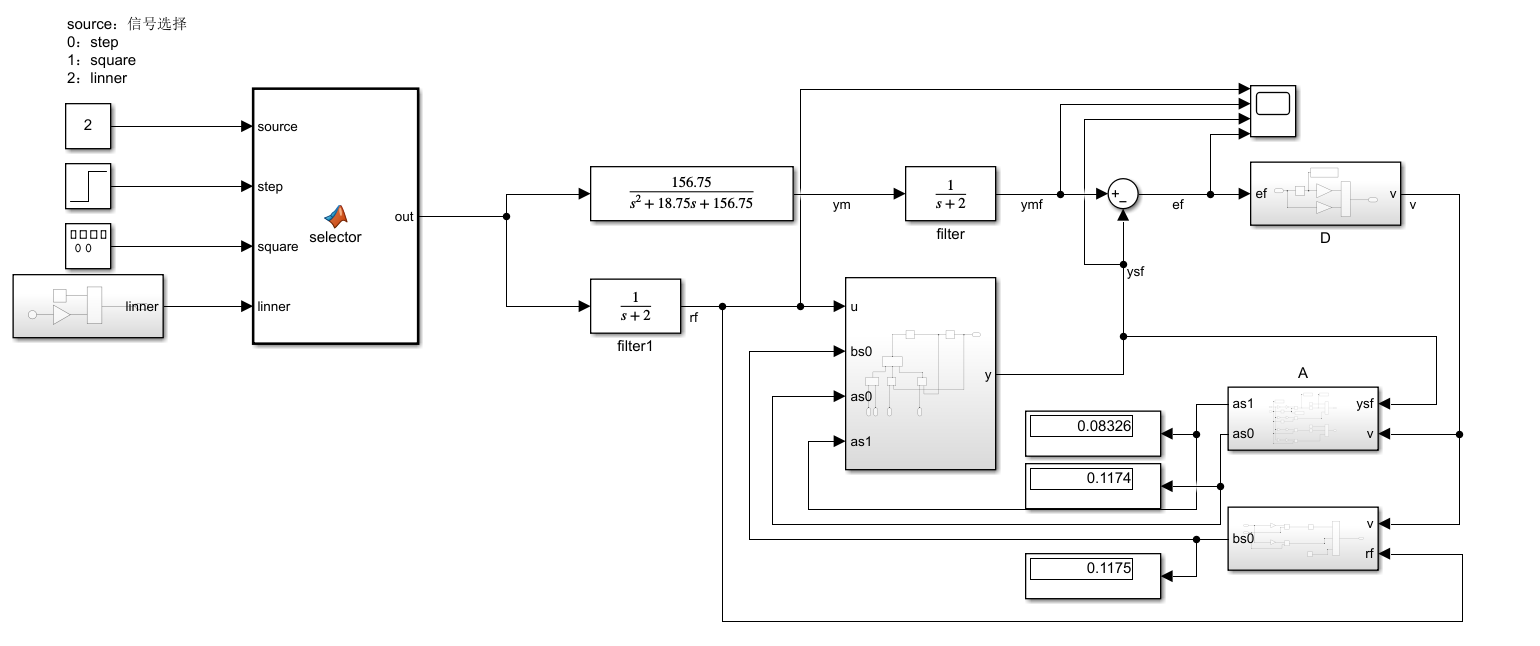
其中 D D D为补偿器
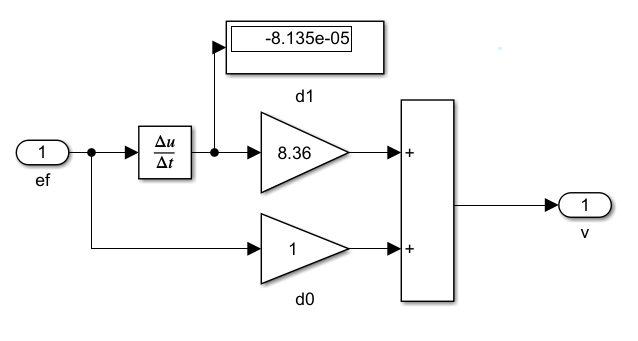
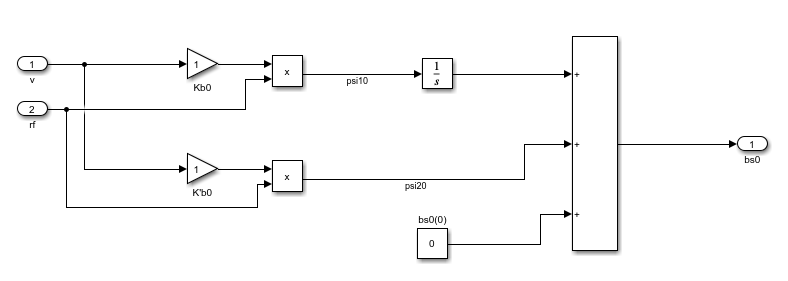
A A A模块为根据自适应律计算 a s 0 , a s 1 a_{s0},a_{s1} as0,as1
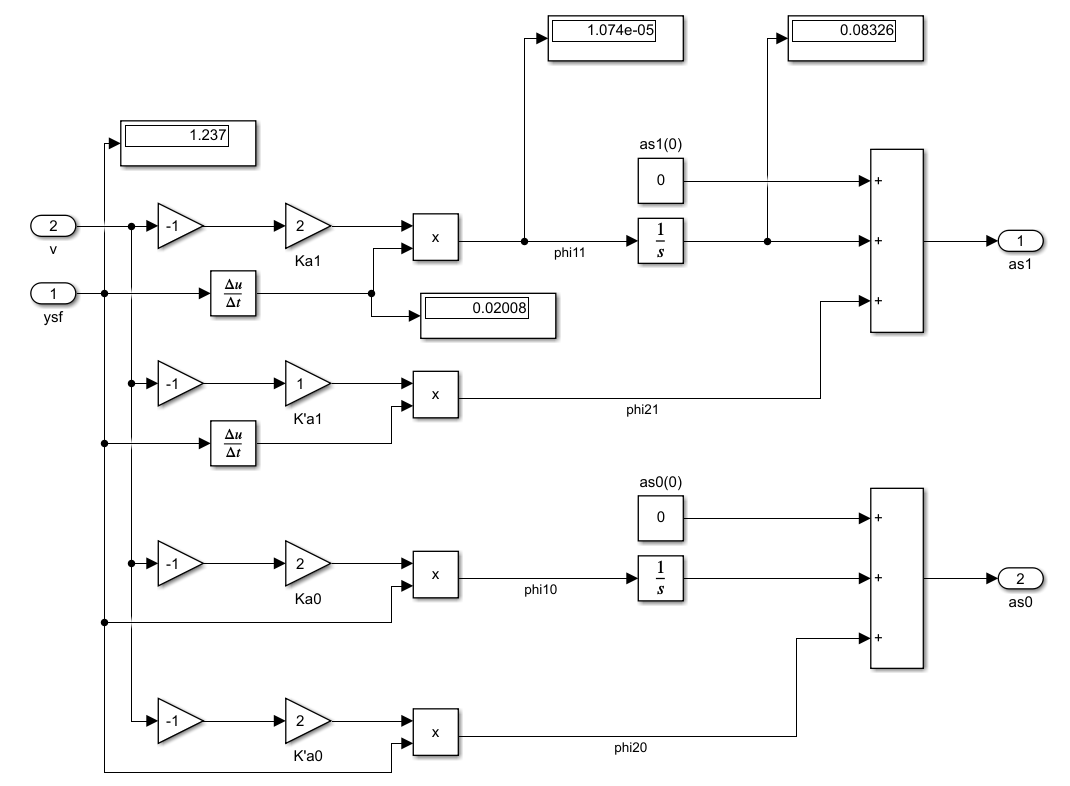
B B B模块同理
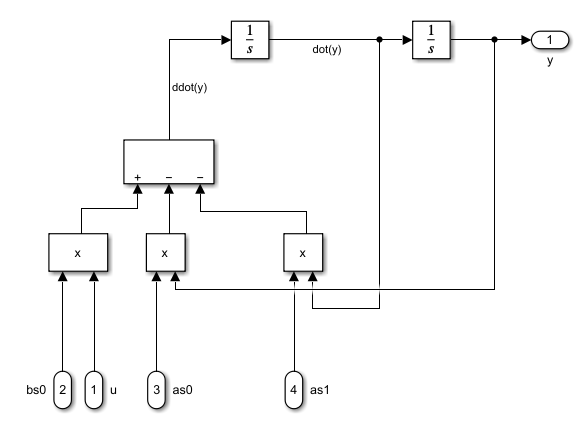
控制对象模块为
这里需要进行一个简单推导
y s = b s 0 r s 2 + a s 1 s + a s 0 y ¨ = − a s 1 y ˙ − a s 0 y + b s 0 r y_s=\frac{b_{s0}r}{s^2+a_{s1}s+a_{s0}}\\ \ddot y=-a_{s1}\dot y-a_{s0}y+b_{s0}r ys=s2+as1s+as0bs0ry¨=−as1y˙−as0y+bs0r
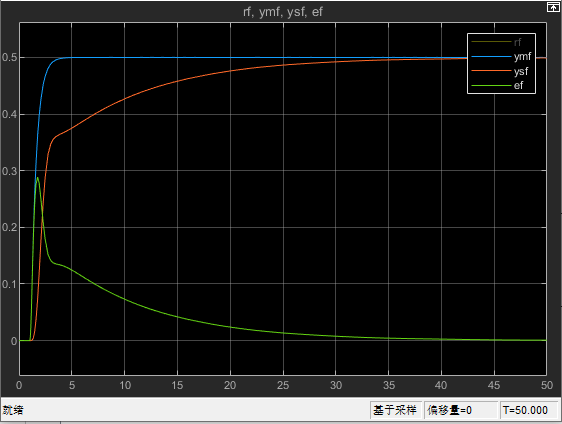
当输入 s t e p step step信号时,
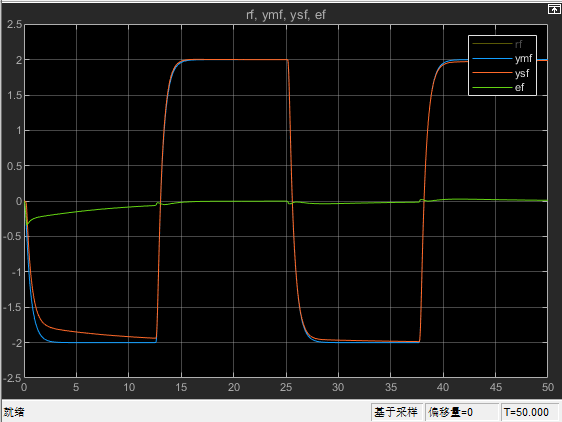
输入 s q u a r e square square信号时,
输入 l i n n e r linner linner信号时,
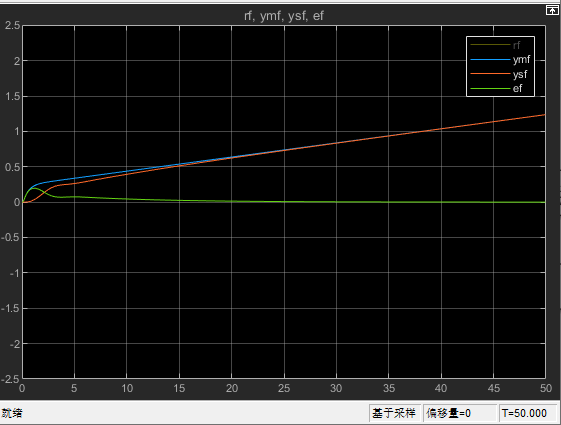
可以看到在自适应律的调节下被控对象可以完全跟上参考模型。
4、总结
结合上一篇用状态变量根据超稳定性理论设计模型参考自适应系统和本文用输入输出变量根据超稳定性理论设计模型参考自适应系统,可以看到都是直接从 A s , B s A_s,B_s As,Bs或者 a s i , b s i a_{si},b_{si} asi,bsi出发,调节这几个参数使其输出跟上参考模型的输出(可以看作重新设计一个新系统,使其输出与参考模型输出一致),并没有从控制对象的 A p , B p A_p,B_p Ap,Bp或者 a p i , b p i a_{pi},b_{pi} api,bpi出发。也就是说,我们可以在原来的被控对象基础上,通过添加前馈+反馈使其输出和构造的新系统输出一致即可(具体实现可以参考上一篇用状态变量根据超稳定性理论设计模型参考自适应系统最后的总结部分)。
至此,模型参考自适应控制这一版块就全部介绍完毕,下一篇开始将会介绍一个新的板块自校正控制。