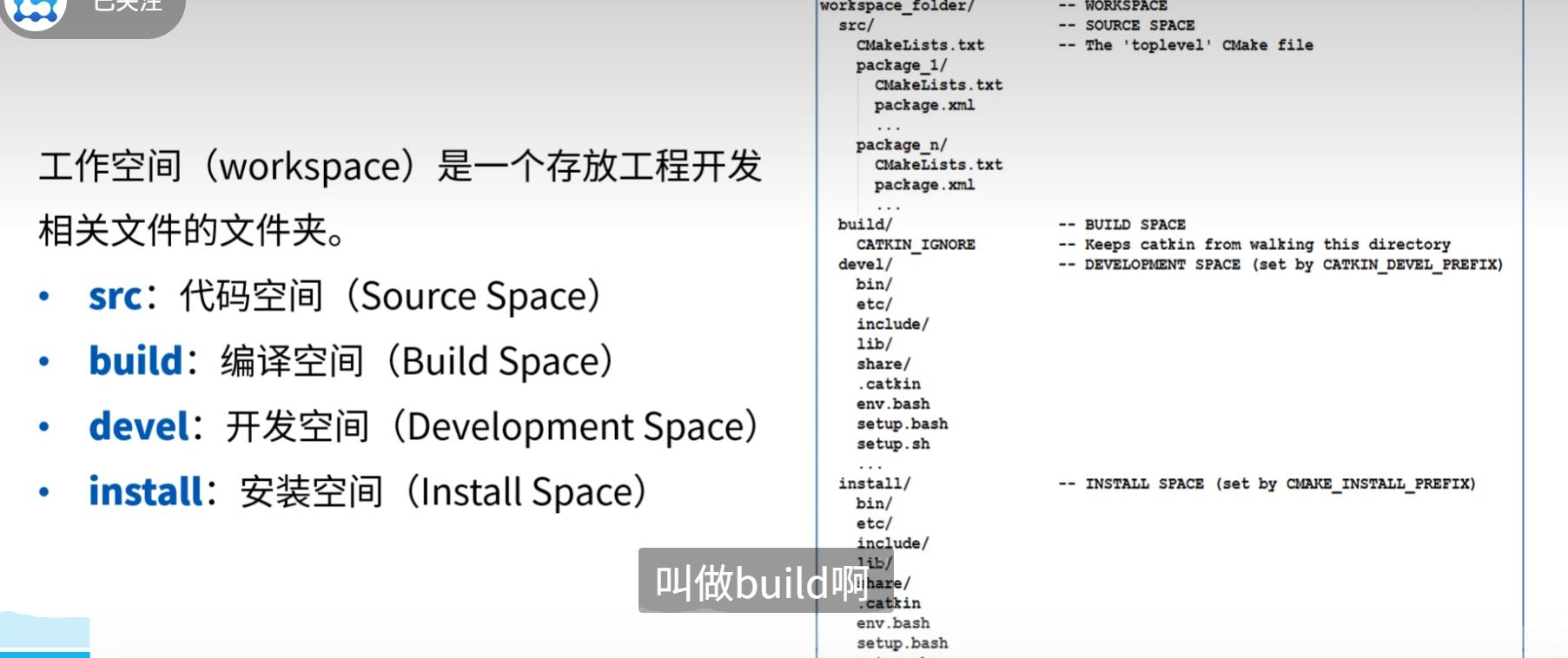
工作空间其实放到嵌入式里就是相关的编程包
 d第一个Init 就是类型的初始化
d第一个Init 就是类型的初始化
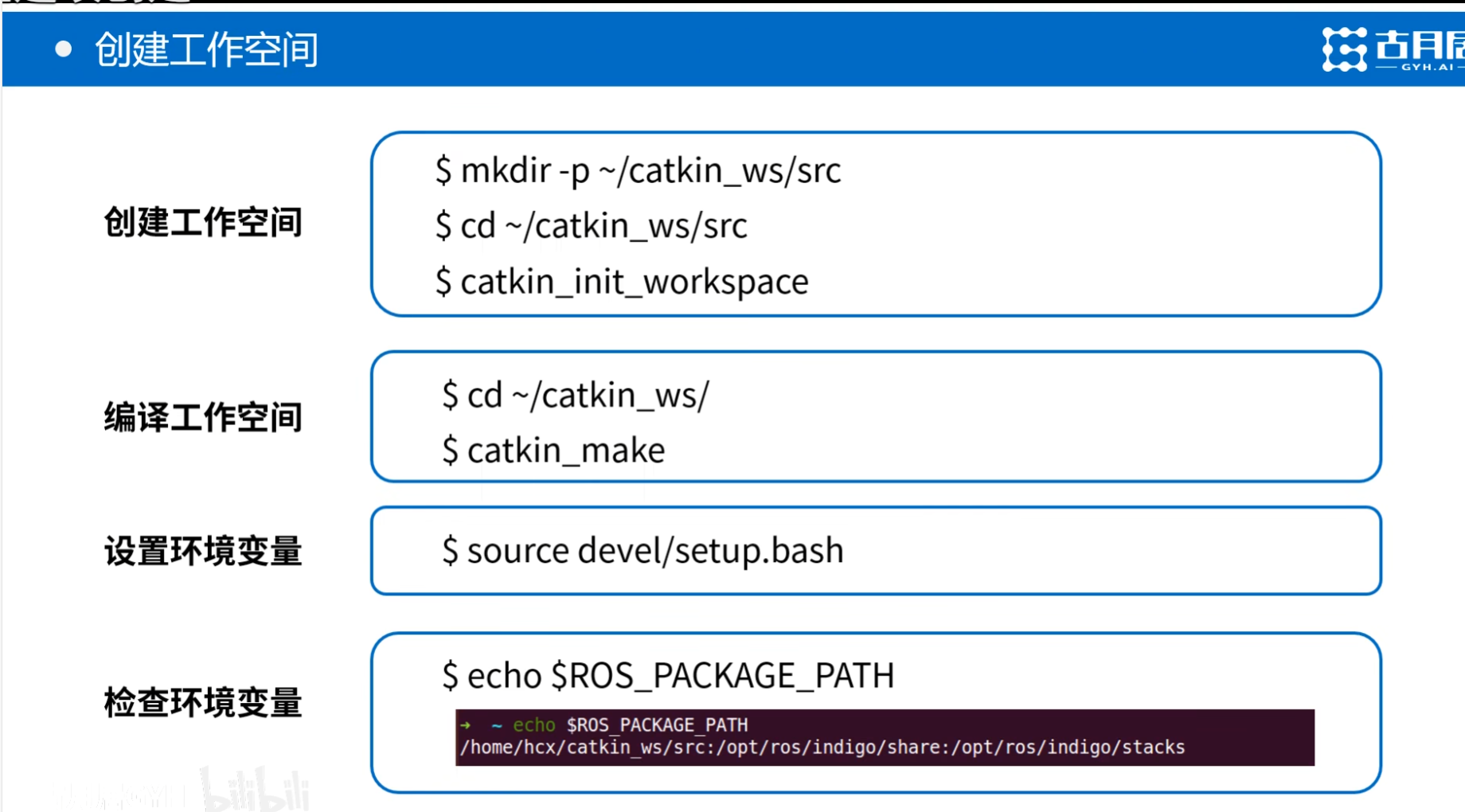
然后正常一个catkin_make 后 就会产生如devil之类的文件, 你需要再自己 终端 一个catkin_make install 一下 。这样对应install也会产生(再设置环境变量之前)
创建功能包 (源码都是要放在功能包之下的)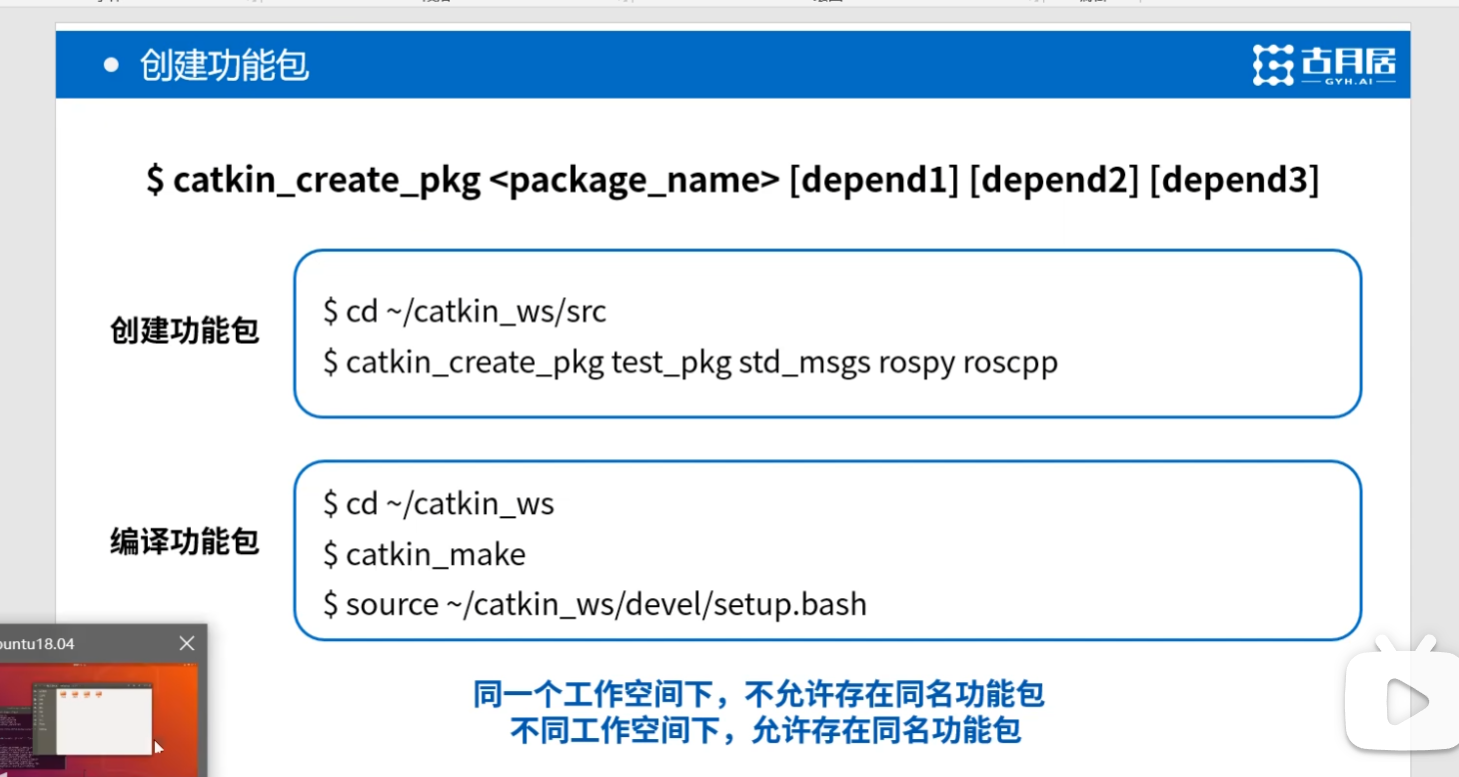
功能包放置在SRC之下
例子: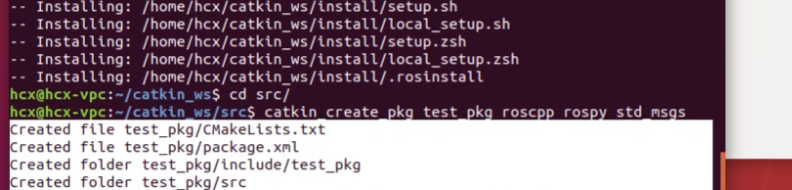
cd到src后。 我们建立的这个 名为test_pkg的功能包 后期包括 roscpp rospy std_msgs 有关依赖的有的功能包 就是 c++ python 以及有关消息的功能包
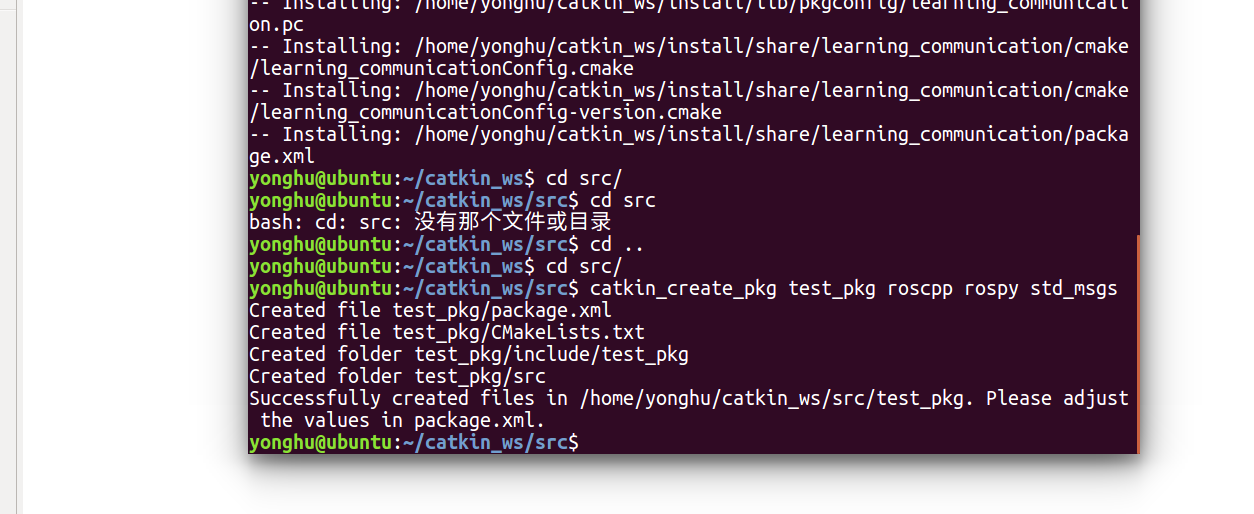
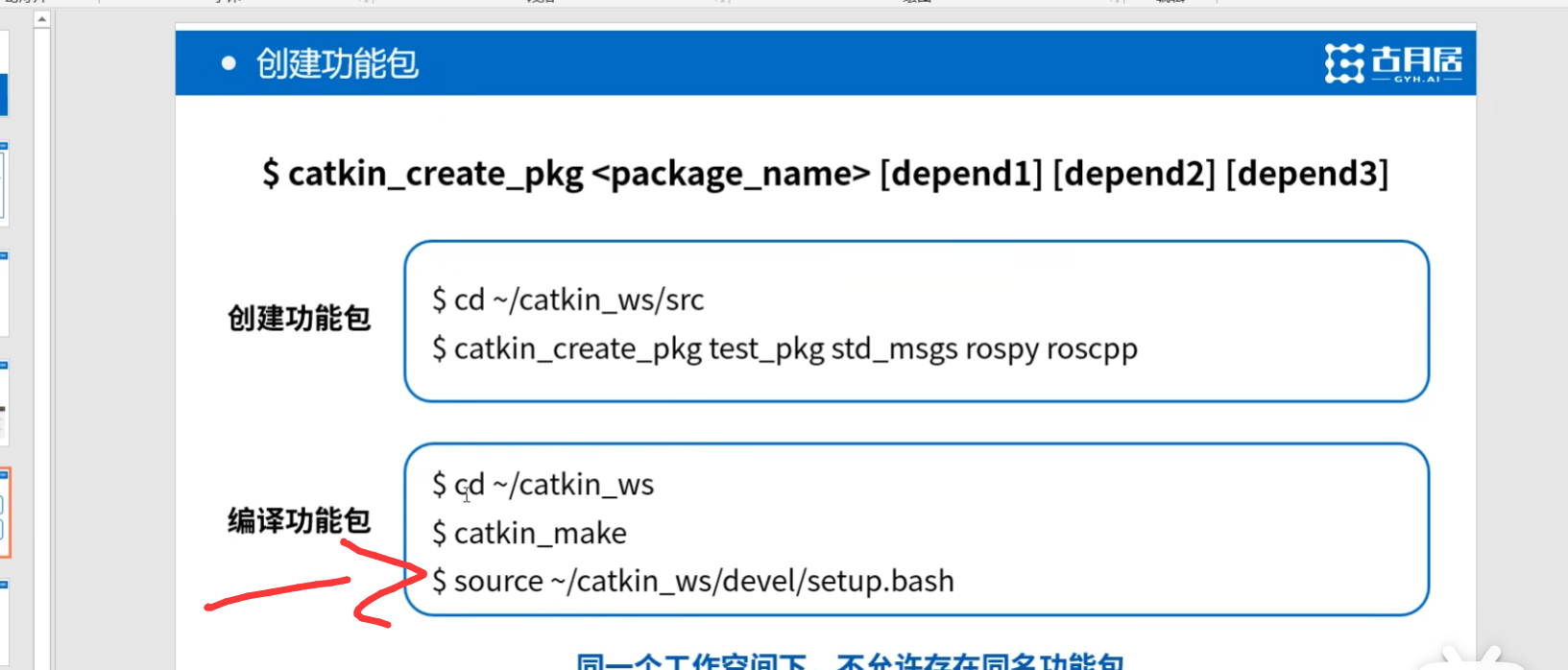
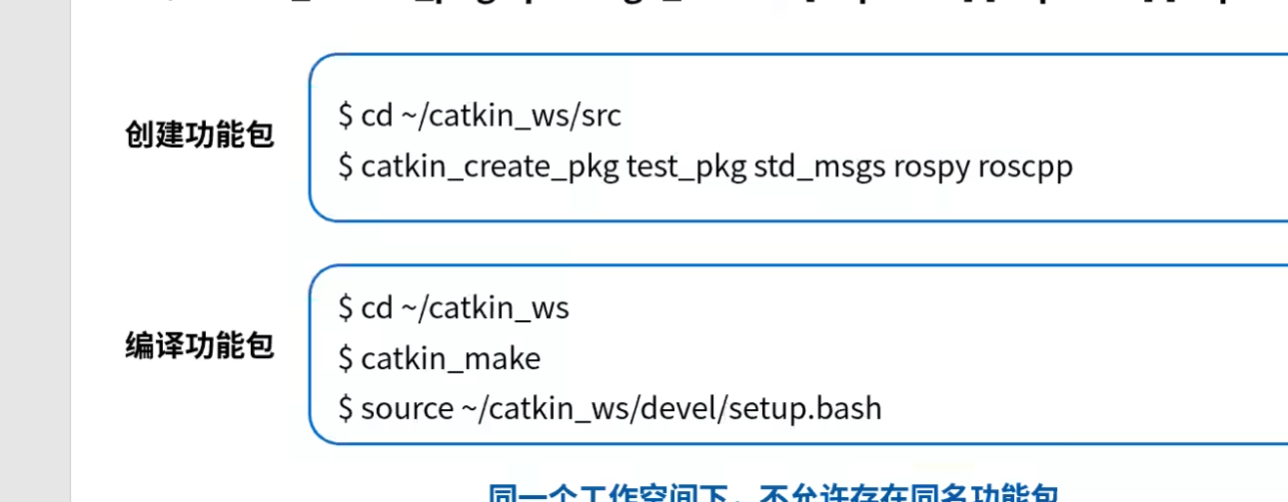
其实创建完 功能包 我们就可以 回到最大的那个工作空间下 进行编译功能包。 使用catkin_make 但是一般没写代码的话 也编译不出来啥
---____________________
那我们弄完大的工作空间, 以及内部src的内部的功能包 (有关catkin_make可以统一最后一块进行编译) 。 下一步就是弄 环境变量 , 环境变量和make一样直接在大工作空间目录下进行即可。 但是他是用于辅助电脑去找到我们设立的功能包的。
所以 环境变量的戏份 就是设置 以及 检测一下对应的环境变量。
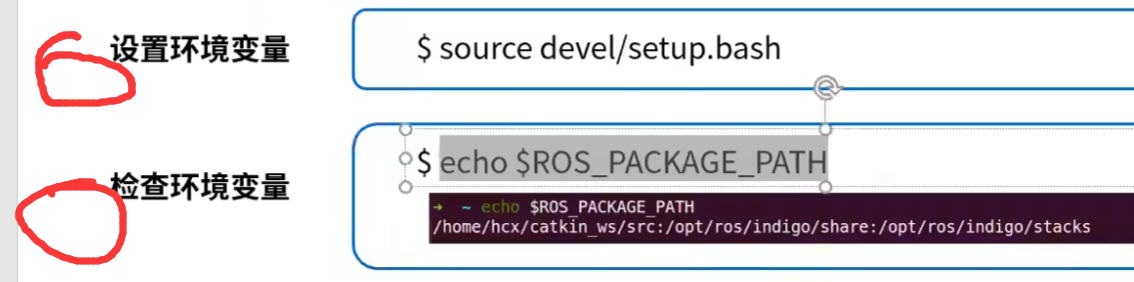
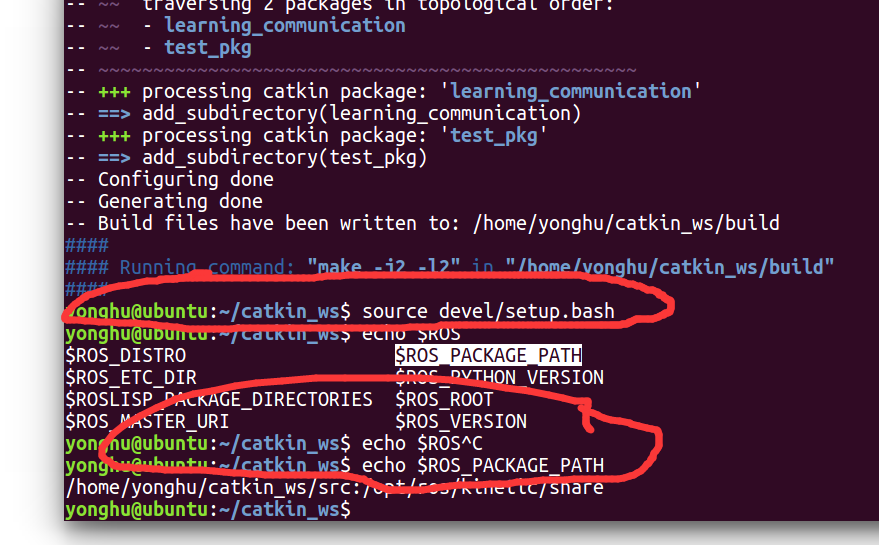
这俩就是设置对应环境变量 以及检测的反应。
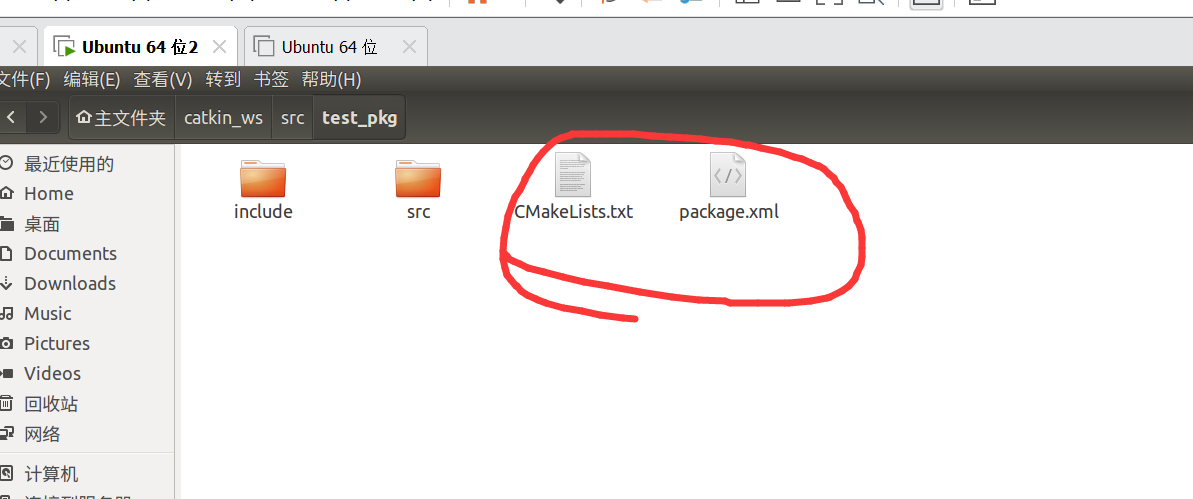
任何一个功能包都是需要这两个txt的文件的。(藏坑了)
总结: 建立 工作空间, 然后 对应的 功能包 pkg相关的指令建立 , 然后大目录下catkin_make进行编译。 然后记得要设立一个环境变量以及检测环境变量。