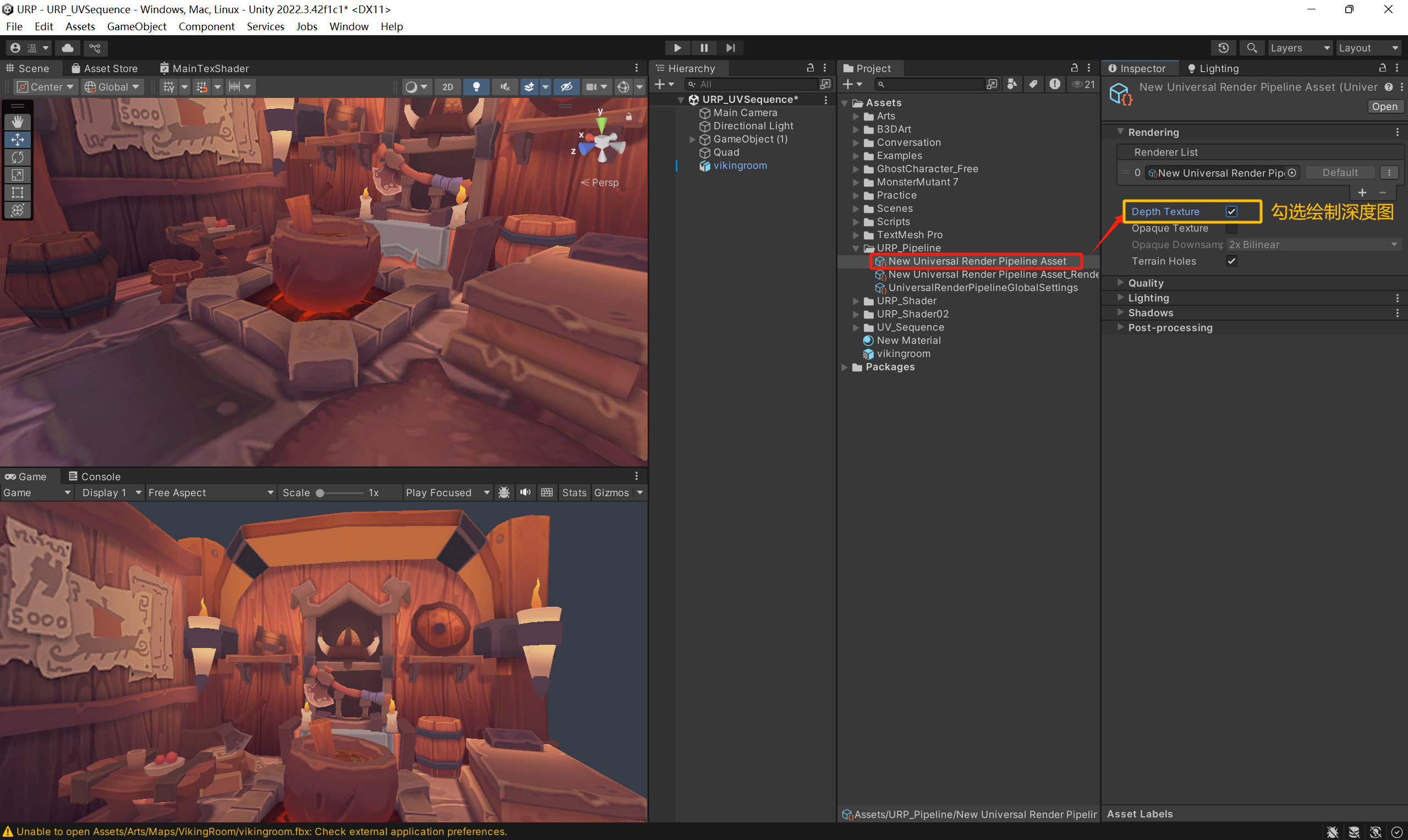
在unity中开启深度图,这样才能在Shader中引用_CameraDepthTexture
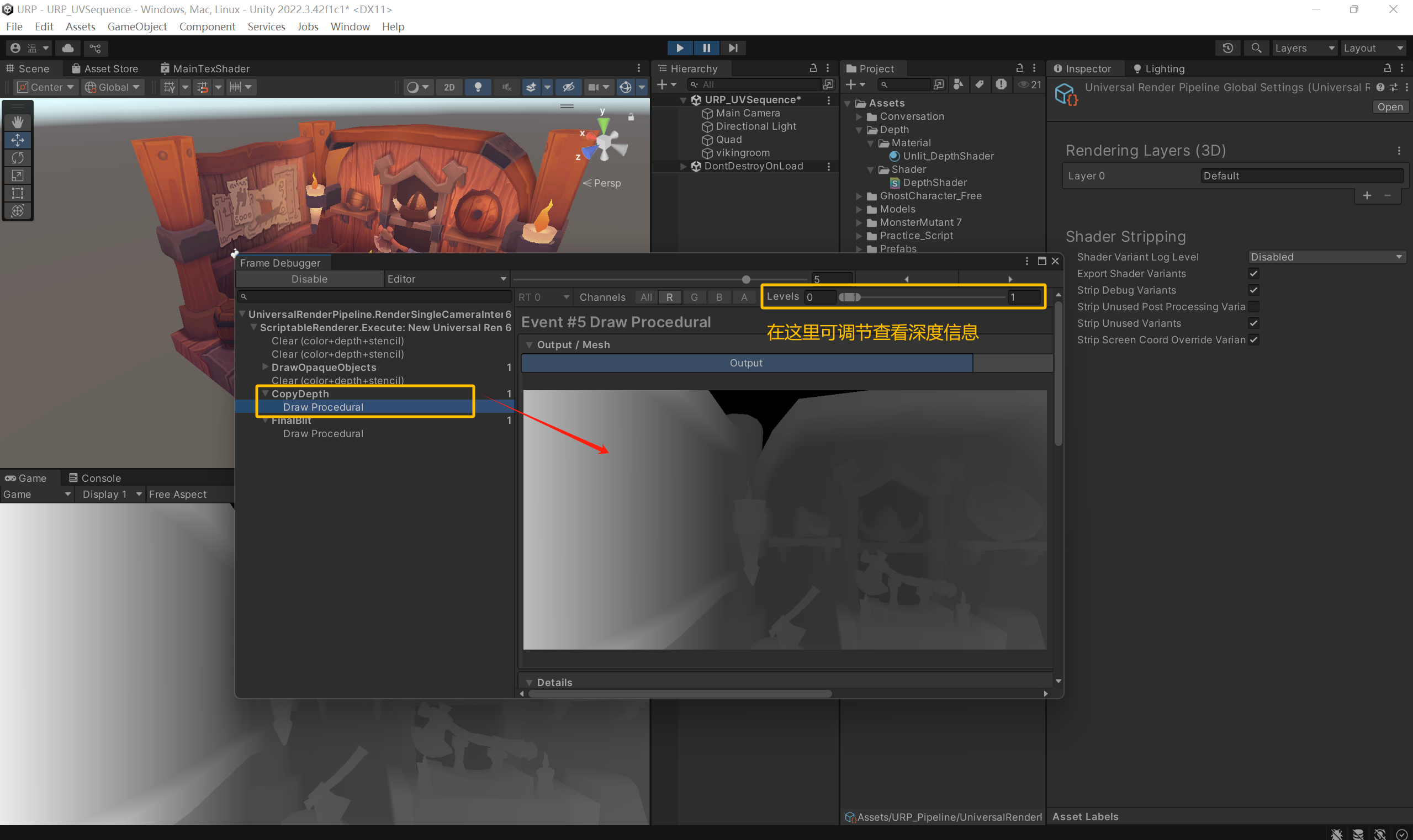
如何查看画面中的深度信息?
半透明物体不会渲染深度信息,数值小于2500的为不透明渲染队列,数值大于2500为半透明渲染队列
所以想要一个物体的深度信息不出现在深度图中,就可以将该物体的Shader的渲染队列改为 "Queue" = "Transparent"
如何在Shader中应用深度图?
在Pass中声明深度图:
TEXTURE2D(_CameraDepthTexture);
SAMPLER(sampler_CameraDepthTexture);
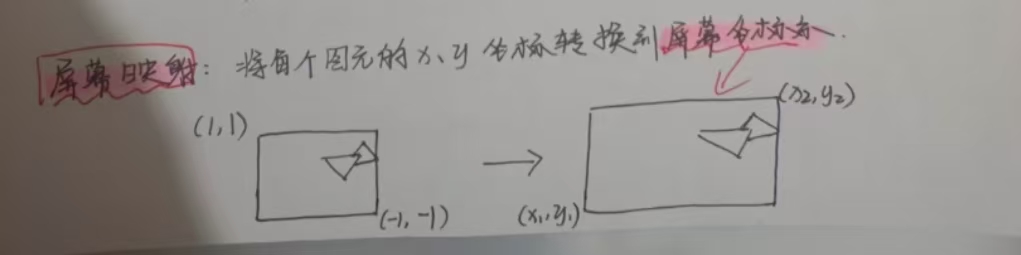
使用面片模型在屏幕空间中的坐标来采样深度图(因为深度图生成是基于屏幕)
//i.positionCS为屏幕映射后的值(也就是屏幕空间下的坐标),_ScreenParams.xy分别代表屏幕的宽高
//i.positionCS/_ScreenParams.xy的作用就是将模型的坐标转换到屏幕坐标系下并映射到0-1的范围内
float2 uv = i.positionCS/_ScreenParams.xy;
//此时uv代表模型在屏幕空间下的坐标值,用此值来采样深度图(此时为非线性的深度图)
float4 depthTex = SAMPLE_TEXTURE2D(_CameraDepthTexture,sampler_CameraDepthTexture,uv);
//因为深度是一个非线性的值域,所以需要将此深度图转换到一个线性的空间(并将值映射到0-1的范围内)
float depth = Linear01Depth(depthTex,_ZBufferParams);
Shader"unity/DepthShader"
{
Properties
{
_MainTex("MainTex",2D)="white"{}
}
SubShader
{
Tags
{
"RenderPipeline"="UniversialPipeline"
"RenderType"="Transparent"
"Queue"="Transparent"
}
ZWrite Off
Pass
{
HLSLPROGRAM
#include "Packages/com.unity.render-pipelines.core/ShaderLibrary/Common.hlsl"
#include "Packages/com.unity.render-pipelines.core/ShaderLibrary/Color.hlsl"
#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Input.hlsl"
#pragma vertex vert
#pragma fragment frag
TEXTURE2D(_MainTex);
#define sampler_MainTex samplerState_Linear_Repeat
SAMPLER(sampler_MainTex);
TEXTURE2D(_CameraDepthTexture);
SAMPLER(sampler_CameraDepthTexture);
struct Attributes
{
float4 positionOS : POSITION;
float2 uv : TEXCOORD;
};
struct Varyings
{
float4 positionCS : SV_POSITION;
float2 uv : TEXCOORD;
float4 screenPos : TEXCOORD1;
};
Varyings vert(Attributes v)
{
Varyings o = (Varyings)0;
o.positionCS = TransformObjectToHClip(v.positionOS);
o.uv = v.uv;
// o.screenPos = ComputeScreenPos(o.positionCS);
return o;
}
float4 frag(Varyings i):SV_Target
{
// float2 uv = i.screenPos.xy/i.screenPos.w;
//i.positionCS为屏幕映射后的值(也就是屏幕空间下的坐标),_ScreenParams.xy分别代表屏幕的宽高
//i.positionCS/_ScreenParams.xy的作用就是将模型的坐标转换到屏幕坐标系下并映射到0-1的范围内
float2 uv = i.positionCS/_ScreenParams.xy;
float4 mainTex = SAMPLE_TEXTURE2D(_MainTex,sampler_MainTex,i.uv);
//此时uv代表模型在屏幕空间下的坐标值,用此值来采样深度图(此时为非线性的深度图)
float4 depthTex = SAMPLE_TEXTURE2D(_CameraDepthTexture,sampler_CameraDepthTexture,uv);
//因为深度是一个非线性的值域,所以需要将此深度图转换到一个线性的空间(并将值映射到0-1的范围内)
float depth = Linear01Depth(depthTex,_ZBufferParams);
return depth;
}
ENDHLSL
}
}
}