飞书文档![]() https://x509p6c8to.feishu.cn/wiki/TcUlwkSVci30jrkdIEqcqlZLnPe
https://x509p6c8to.feishu.cn/wiki/TcUlwkSVci30jrkdIEqcqlZLnPe
原理图原理说明
|----------------------------------------------------------------------------|----------------------------------------------------------------------------|
|  |
|  |
|
新建工程
复制打开工程模板ProjectTemplates
在右侧的PinOut View中找到PA6
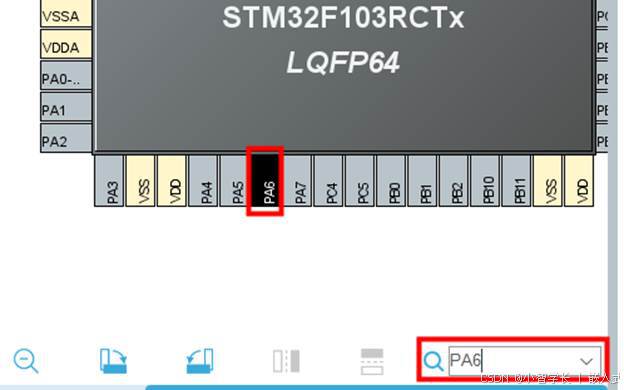
设置PA6为输出模式(这里我们可以看到PA6这个IO是支持多种功能的)
例如ADC、SPI、TIM、GPIO这些功能,与芯片手册是一一对应的
GPIO****输出参数说明
然后设置硬件对应的参数
先了解原理部分:在芯片手册中,可以看到GPIO部分的结构图:
|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| 保护二极管: IO引脚上下两边两个二极管用于防止引脚外部过高、过低的电压输入,当引脚电压高于VDD_FT时,上方的二极管导通,当引脚电压低于VSS时,下方的二极管导通,防止不正常电压引入芯片导致芯片烧毁 上拉、下拉电阻: 控制引脚默认状态的电压,开启上拉的时候引脚默认电压为高电平,开启下拉的时候引脚默认电压为低电平 输出模式: 推挽输出模式下,P-MOS和N-MOS都正常工作,开漏输出模式下,只有下面的N-MOS工作,上面的P-MOS不工作。 推挽输出模式: 输出寄存器为0时,经过输出控制模块,转为1,此时N-MOS打开,P-MOS关闭,IO输出低 输出寄存器为1时,经过输出控制模块,转为0,此时N-MOS关闭,P-MOS打开,IO为VDD 开漏输出模式: 输出寄存器为0时,经过输出控制模块,转为1,此时N-MOS打开,IO输出低 输出寄存器为1时,经过输出控制模块,转为0,此时N-MOS关闭,IO为高阻态 |
再了解如何使用:
|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| GPIO output level:上电后的默认输出电平,有low和high两种选择 因为LED灯的阴极连接的单片机引脚,这里设置为高电平,上电时LED灯熄灭. GPIO mode: 推挽输出和开漏输出选择 两者模式的区别在于推挽输出中1代表VCC,0表示GND;开漏输出中1代表高阻态,0代表GND。 简单总结是,如果需要不等同于VCC的输出电压,或者是线与功能(I2C、SMBUS类总线占用原理),则选择开漏输出,其它一律选择推挽输出。 1、当开漏输出为1,IO处于高阻态,IO电压由外部上拉决定,我们可以在外部接一个上拉电阻,上拉电源为5V,实现IO控制5V输出的效果。 2、若有很多个开漏模式引脚连接到一起时,只有当所有引脚都输出高阻态,才由上拉电阻提供高电平。若其中一个引脚为低电平,那线路就相当于都接地,使得整条线路都为低电平。这也是I2C,SMBus等总线判断总线占用状态的原理。 所以,这里设置为推挽输出模式. GPIO Pull-up/Pull-down:GPIO上下拉设置 当GPIO被配置为推挽输出时,上下拉可以控制输出电平的稳定性。 当GPIO被配置为开漏输出时,上下拉可以控制输出电平的状态。在没有上下拉的情况下,开漏输出的GPIO会处于高阻态,输出电平由外部上下拉决定。通过配置上拉电阻可以使GPIO处于高电平状态,通过配置下拉电阻可以使GPIO处于低电平状态。 这里设置为上拉. Maxinum output speed:最大的输出速度,一般选择low就可以了。 配置高速:输出频率高,噪音大,功耗高; (如 配置SPI、CAN引脚,要求通信稳定,速度过低会造成输出失真、通信异常。 配置低速:输出频率低,噪音小,功耗低,提高系统EMI(电磁干扰)性能;(低功耗产品会选择低)实际应用中,满足要求的情况下就低不就高。 这里设置为低速即可。 User Label: 用户标签 给引脚设置名称,如果遇到标签未生成,可以关闭所有软件重新生成 这里我设置为LED1,可以让后续编写代码时更清晰 |
代码生成**&** 理解:
然后点击生成代码,重新打开工程,打开main.c,这里就是整个工程的入口了。
HAL_Init();用于初始化HAL库相关配置
SystemClock_Config();用于初始化芯片时钟配置
MX_GPIO_Init();用于初始化GPIO配置
跳转MX_GPIO_Init(),在这里,我们可以看到里面的配置是由CUBEMX中的配置生成的,
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = LED1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LED1_GPIO_Port, &GPIO_InitStruct);
}接口讲解:
/**
* @brief Sets or clears the selected data port bit.
*
* @note This function uses GPIOx_BSRR register to allow atomic read/modify
* accesses. In this way, there is no risk of an IRQ occurring between
* the read and the modify access.
*
* @param GPIOx: where x can be (A..G depending on device used) to select the GPIO peripheral
* @param GPIO_Pin: specifies the port bit to be written.
* This parameter can be one of GPIO_PIN_x where x can be (0..15).
* @param PinState: specifies the value to be written to the selected bit.
* This parameter can be one of the GPIO_PinState enum values:
* @arg GPIO_PIN_RESET: to clear the port pin
* @arg GPIO_PIN_SET: to set the port pin
* @retval None
*/
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
GPIOx=GPIOA
GPIO_Pin=GPIO_PIN_6
PinState=GPIO_PIN_SET
对应初始化时,设置GPIOA6输出高电平
/**
* @brief GPIO Init structure definition
*/
typedef struct
{
uint32_t Pin; /*!< Specifies the GPIO pins to be configured.
This parameter can be any value of @ref GPIO_pins_define */
uint32_t Mode; /*!< Specifies the operating mode for the selected pins.
This parameter can be a value of @ref GPIO_mode_define */
uint32_t Pull; /*!< Specifies the Pull-up or Pull-Down activation for the selected pins.
This parameter can be a value of @ref GPIO_pull_define */
uint32_t Speed; /*!< Specifies the speed for the selected pins.
This parameter can be a value of @ref GPIO_speed_define */
} GPIO_InitTypeDef;
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = LED1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
初始化结构体变量
设置GPIO_PIN_6为推挽输出,上拉,速度为低速
/**
* @brief Initializes the GPIOx peripheral according to the specified parameters in the GPIO_Init.
* @param GPIOx: where x can be (A..G depending on device used) to select the GPIO peripheral
* @param GPIO_Init: pointer to a GPIO_InitTypeDef structure that contains
* the configuration information for the specified GPIO peripheral.
* @retval None
*/
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
最后初始化GPIOA GPIO_PIN_6为推挽输出,上拉,速度为低速控制GPIO输出
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_RESET);
HAL_Delay(500);
HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_SET);
HAL_Delay(500);
}
/* USER CODE END 3 */
设置Pin输出高低电平
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);当然,也可以使用HAL_GPIO_TogglePin控制输出电平翻转
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
HAL_Delay(500);
}
/* USER CODE END 3 */
}
设置Pin电平翻转
void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);烧录、运行
多个****LED 控制
如果希望所有灯同时闪烁,则同时添加多个IO

while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin);
HAL_GPIO_TogglePin(LED3_GPIO_Port,LED3_Pin);
HAL_Delay(500);
}
/* USER CODE END 3 */补充:复用输出功能
|--------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| 复用输出功能:可以理解为GPIO口被用作第二功能时的配置情况(即并非作为通用IO口使用) 复用开漏输出和开漏输出原理一样,区别在于输出控制源不同,前者是通过外设后者是通过CPU写寄存器。 复用推挽输出和推挽输出原理一样,区别在于输出控制源不同,前者是通过外设后者是通过CPU写寄存器。 例如I2C、SPI、CAN、UART等 |