视频讲解:
复刻低成本机械臂 SO-ARM100 上位机控制调试
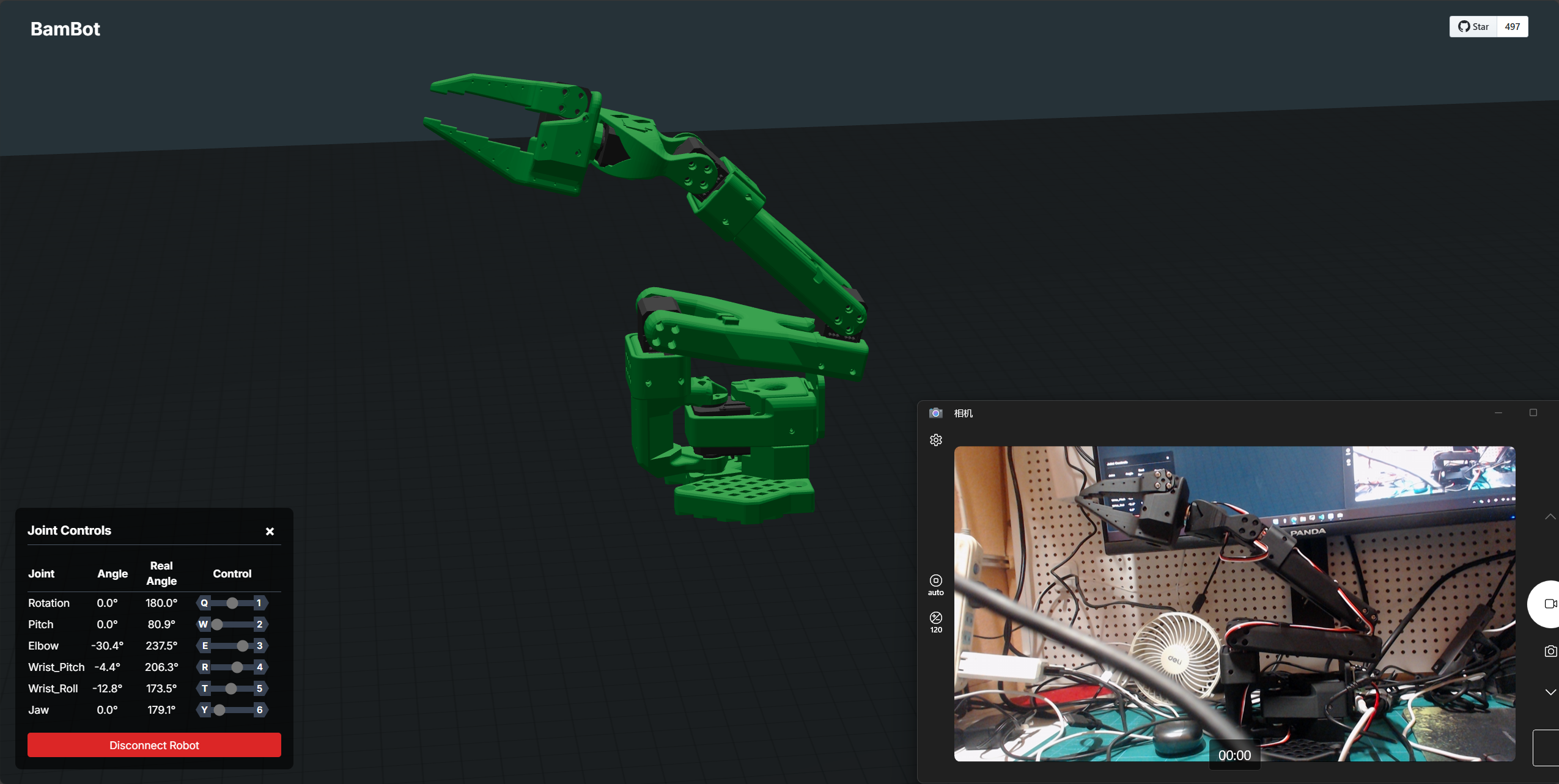
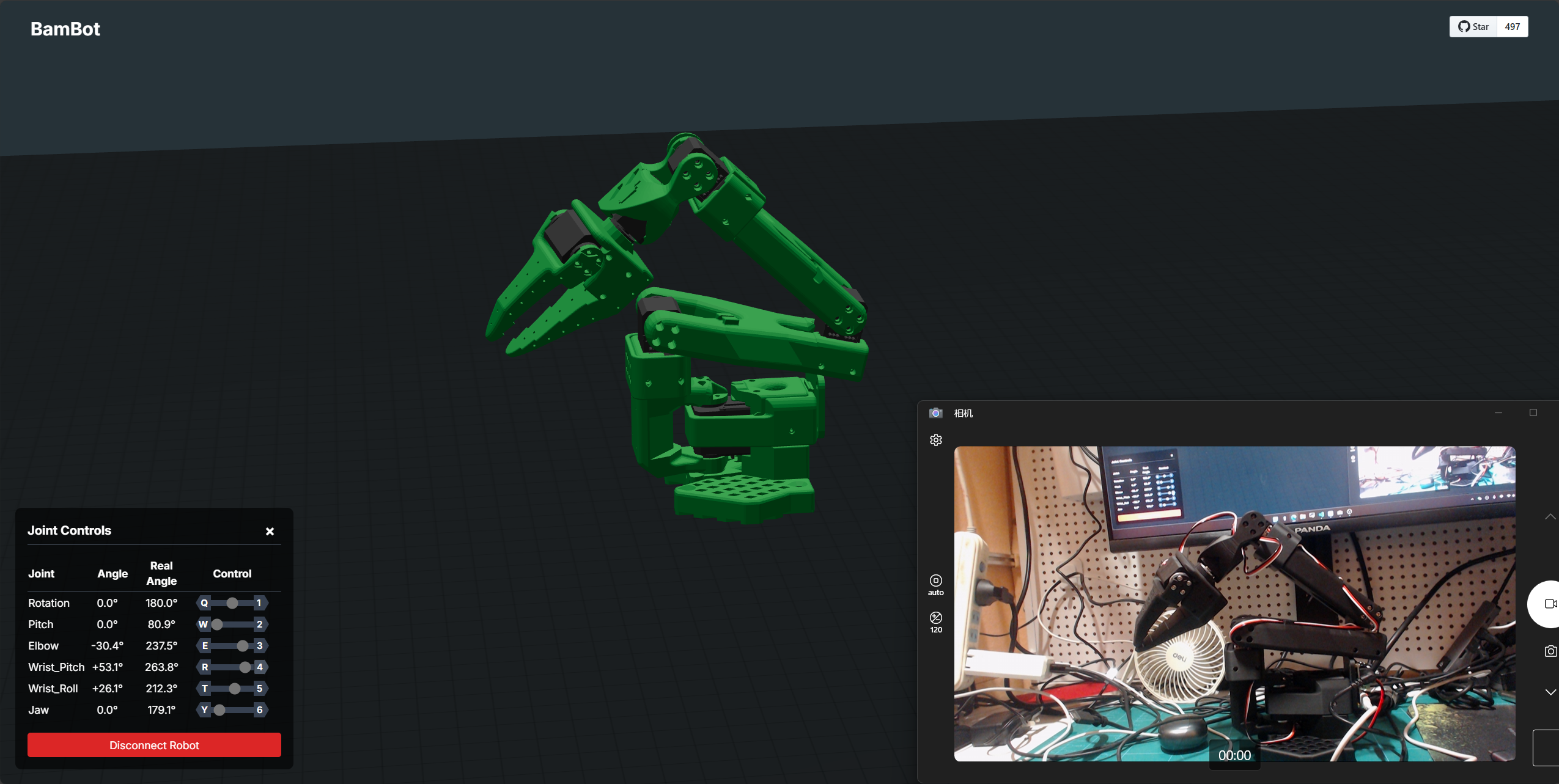
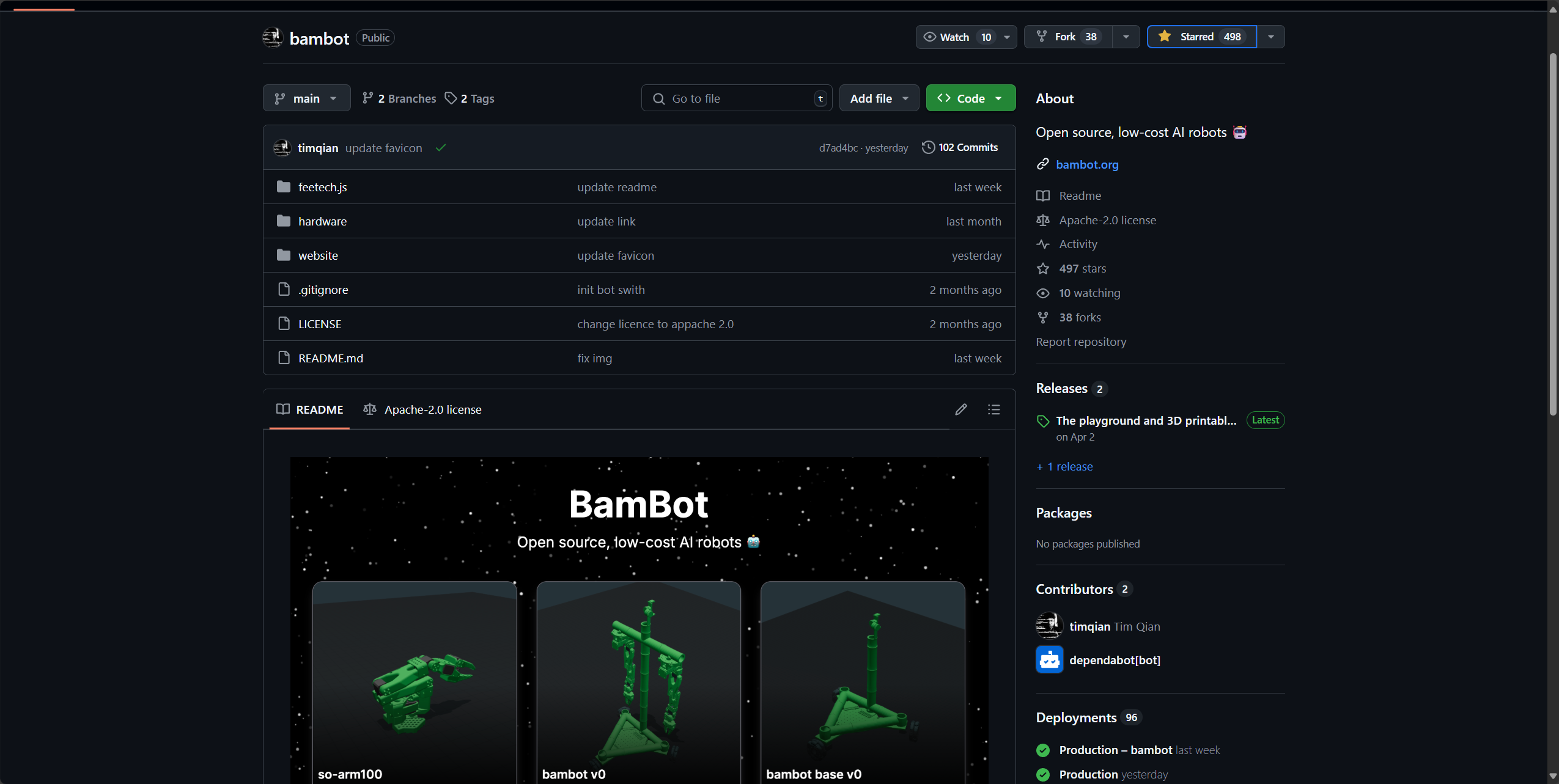
SO-ARM100机械臂组装并且标定完成后,下一步就是整臂的调试,由于只做了follower这个从臂,所以要使用lerobot仓库中遥操作控制的方式就不行了,这里发现了bambot这个开源仓库,感谢大佬,通过web的形式可以可视化控制so-arm100这个机械臂,没有其他的依赖,赶紧点个星!
可以在windows或其他有浏览器访问的地方均可,只需要调用串口设备,
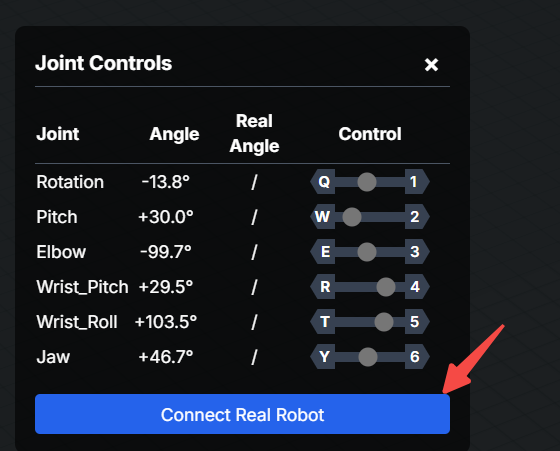
在启动的时候选择对应串口就可以连接
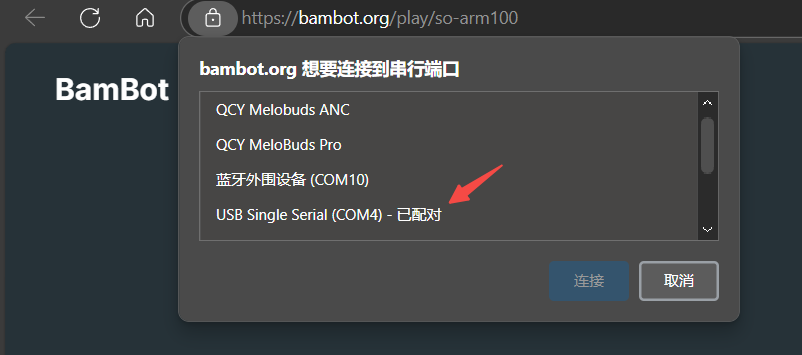
这里应该是增量式的控制,注意上电控制前的位置要和这个页面中的保持一致,拖动joint的控制即可