OpenCV_Position 项目深度解析:基于 OpenCV 的相机定位技术
在计算机视觉领域,相机定位是一个极具挑战性且应用广泛的任务。通过从视频流中提取已知尺寸的符号并计算单应性矩阵(Homography),可以推断出相机的位置和姿态。GitHub 上的 OpenCV_Position 项目正是基于这一原理,提供了一个简单易懂的入门级解决方案,帮助开发者快速掌握相机定位技术。本文将详细介绍该项目的技术原理、实战运行方式、常见问题及解决方法,以及相关研究背景。
一、项目概述
OpenCV_Position 是由 RaubCamaioni 开发的一个开源项目,旨在通过已知尺寸的符号图像和视频流,计算相机的位置和姿态。该项目最初是为了跟踪一个着陆垫而设计的,经过多年的发展和优化,代码更加清晰易懂,适合初学者学习和实践。
项目的核心是单应性矩阵的计算和分解。通过从视频中提取符号的轮廓,计算符号与已知参考图像之间的单应性矩阵,进而分解出旋转矩阵和平移矩阵,从而推断出相机的相对位置和姿态。
二、技术原理
(一)单应性矩阵(Homography)
单应性矩阵是一个 3×3 的矩阵,用于描述两个平面之间的几何变换关系。在相机定位中,单应性矩阵可以将图像平面上的点映射到另一个平面上的点。通过计算符号图像与参考图像之间的单应性矩阵,可以推断出相机的旋转和平移信息。
(二)算法步骤
OpenCV_Position 的算法流程如下:
- 获取视频帧:从视频流中逐帧读取图像。
- 图像预处理 :
- 对图像进行高斯模糊,以减少噪声。
- 将图像转换为灰度图。
- 边缘检测:使用 Canny 算法检测图像中的边缘。
- 轮廓检测 :使用 OpenCV 的
findContours函数检测图像中的轮廓。 - 轮廓筛选 :
- 筛选出具有特定边数(如 12 边)的轮廓。
- 检查轮廓的周长是否在设定的阈值范围内。
- 检查轮廓的内角是否符合符号的几何特征。
- 将轮廓点按顺时针方向重新排序。
- 将轮廓的起始点调整为最接近参考点的位置。
- 计算单应性矩阵 :使用 OpenCV 的
findHomography函数,计算符号轮廓与参考图像之间的单应性矩阵。 - 去除相机矩阵:通过相机的内参矩阵,将单应性矩阵转换为相对于相机坐标系的变换矩阵。
- 分解单应性矩阵:使用 Fast Homography Decomposition 方法,将单应性矩阵分解为旋转矩阵和平移矩阵。
(三)相机内参矩阵
相机内参矩阵是一个 3×3 的矩阵,描述了相机的内部参数,包括焦距、光心位置等。在实际应用中,如果使用不同的相机,需要先通过 OpenCV 提供的标定工具计算相机的内参矩阵。
三、项目实战运行
(一)环境搭建
OpenCV_Position 使用了 Python 和 OpenCV 库。以下是搭建环境的基本步骤:
-
安装 Python:确保已安装 Python 3.x。
-
安装依赖库 :
- OpenCV:
pip install opencv-python - NumPy:
pip install numpy - 其他依赖库可以通过
pyproject.toml文件手动安装。
- OpenCV:
-
安装 uv (可选):项目推荐使用 uv 来管理 Python 环境。如果使用 uv,可以通过以下命令运行项目:
uv run tracker.py -f square_motion.mp4
(二)运行步骤
-
下载项目代码 :
- 从 GitHub 仓库 下载代码。
- 下载项目中提供的示例视频文件(如
square_motion.mp4)。
-
运行脚本 :
-
如果安装了 uv,直接运行:
uv run tracker.py -f square_motion.mp4 -
如果未安装 uv,可以通过以下命令运行:
python tracker.py -f square_motion.mp4
-
-
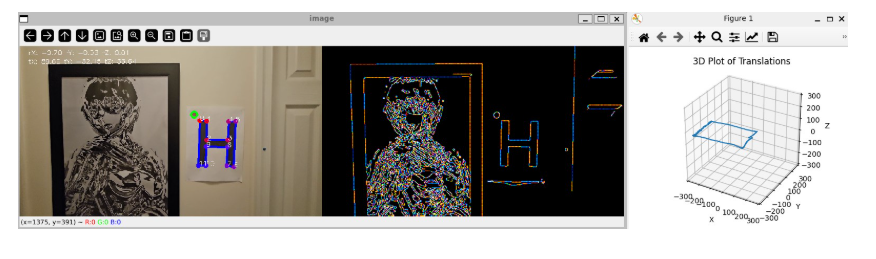
观察输出结果 :
- 程序会实时显示视频帧,并绘制符号的轮廓和定位结果。
- 输出的旋转矩阵和平移矩阵将显示在终端中。
(三)常见问题及解决方法
- 相机内参矩阵问题 :
- 如果使用不同的相机,需要重新标定相机内参矩阵。可以参考 OpenCV 的 相机标定教程。
- 轮廓检测失败 :
- 如果轮廓检测失败,可能是由于符号的边缘不够清晰。可以尝试调整高斯模糊的参数或 Canny 边缘检测的阈值。
- 单应性矩阵计算失败 :
- 如果
findHomography函数返回错误,可能是由于输入的轮廓点数量不足或质量不佳。可以检查轮廓筛选条件是否过于严格。
- 如果
- 运行速度慢 :
- 如果程序运行速度较慢,可以尝试降低视频帧率或分辨率,或者优化代码中的计算步骤。
四、相关研究背景
OpenCV_Position 的核心算法基于单应性矩阵的计算和分解,这一技术在计算机视觉领域有着广泛的研究背景。以下是一些相关的研究方向和经典论文:
(一)单应性矩阵的计算
单应性矩阵的计算通常基于特征点匹配。经典的算法包括 RANSAC(随机抽样一致性)算法,用于鲁棒地估计单应性矩阵。相关论文可以参考:
- Fischler, M. A., & Bolles, R. C. (1981). Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM, 24(6), 381-395.
(二)单应性矩阵的分解
单应性矩阵的分解是将单应性矩阵分解为旋转矩阵和平移矩阵的过程。这一技术在机器人视觉和增强现实领域有着重要应用。相关论文可以参考:
- Zhang, Z. (2000). A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(11), 1330-1334.
(三)相机标定
相机标定是计算相机内参矩阵的过程,是计算机视觉中的基础任务。OpenCV 提供了完整的标定工具,其算法基于 Zhang 的标定方法。相关论文可以参考:
- Zhang, Z. (2000). A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(11), 1330-1334.
五、总结
OpenCV_Position 是一个简单而实用的相机定位项目,通过单应性矩阵的计算和分解,实现了从视频流中推断相机位置的功能。该项目代码清晰易懂,适合初学者学习和实践。通过本文的介绍,你已经了解了 OpenCV_Position 的技术原理、实战运行方式、常见问题及解决方法,以及相关研究背景。希望本文能够帮助你更好地理解和使用 OpenCV_Position,开启你的计算机视觉之旅。