基于Python的相机标定项目Camera-Calibration深度解析
-
- [1. 项目概述](#1. 项目概述)
- [2. 技术原理与数学模型](#2. 技术原理与数学模型)
-
- [2.1 相机模型](#2.1 相机模型)
- [2.2 畸变模型](#2.2 畸变模型)
- [3. 实战指南:项目运行与标定流程](#3. 实战指南:项目运行与标定流程)
-
- [3.1 环境配置](#3.1 环境配置)
- [3.2 数据准备](#3.2 数据准备)
- [3.3 执行步骤](#3.3 执行步骤)
- [3.4 结果验证](#3.4 结果验证)
- [4. 常见问题与解决方案](#4. 常见问题与解决方案)
-
- [4.1 角点检测失败](#4.1 角点检测失败)
- [4.2 标定结果异常](#4.2 标定结果异常)
- [4.3 运行时错误](#4.3 运行时错误)
- [5. 相关论文与技术演进](#5. 相关论文与技术演进)
-
- [5.1 经典论文](#5.1 经典论文)
- [5.2 前沿方向](#5.2 前沿方向)
- [6. 项目扩展建议](#6. 项目扩展建议)
-
- [6.1 功能增强](#6.1 功能增强)
- [6.2 性能优化](#6.2 性能优化)
1. 项目概述
Camera-Calibration是一个基于Python和OpenCV实现的相机标定工具,旨在通过张正友标定法(Zhang's Method)计算相机的内参矩阵、畸变系数和外参参数。该项目适用于计算机视觉、机器人导航、增强现实(AR)等领域,能够有效校正镜头畸变并建立图像像素坐标与真实世界坐标的映射关系。
技术核心
- 张正友标定法:通过多视角棋盘格图像计算相机参数,具有高精度和低实现复杂度的特点。
- OpenCV集成 :利用
findChessboardCorners检测棋盘格角点,通过calibrateCamera进行参数优化。 - 非线性优化:采用Levenberg-Marquardt算法最小化重投影误差,确保标定结果的准确性。
2. 技术原理与数学模型
2.1 相机模型
相机的成像模型基于小孔成像原理,数学表达为:
s u v 1 = f x 0 c x 0 f y c y 0 0 1 r 11 r 12 r 13 t x r 21 r 22 r 23 t y r 31 r 32 r 33 t z X w Y w Z w 1 s \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_x \\ r_{21} & r_{22} & r_{23} & t_y \\ r_{31} & r_{32} & r_{33} & t_z \end{bmatrix} \begin{bmatrix} X_w \\ Y_w \\ Z_w \\ 1 \end{bmatrix} s uv1 = fx000fy0cxcy1 r11r21r31r12r22r32r13r23r33txtytz XwYwZw1
其中:
- ( u , v ) (u, v) (u,v)为像素坐标, ( X w , Y w , Z w ) (X_w, Y_w, Z_w) (Xw,Yw,Zw)为世界坐标
- f x , f y f_x, f_y fx,fy为焦距, ( c x , c y ) (c_x, c_y) (cx,cy)为主点坐标
- r i j r_{ij} rij和 t i t_i ti构成旋转矩阵和平移向量(外参)
2.2 畸变模型
径向畸变和切向畸变的校正公式:
x c o r r e c t e d = x ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) + 2 p 1 x y + p 2 ( r 2 + 2 x 2 ) y c o r r e c t e d = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) + p 1 ( r 2 + 2 y 2 ) + 2 p 2 x y \begin{aligned} x_{corrected} &= x(1 + k_1 r^2 + k_2 r^4 + k_3 r^6) + 2p_1 xy + p_2(r^2 + 2x^2) \\ y_{corrected} &= y(1 + k_1 r^2 + k_2 r^4 + k_3 r^6) + p_1(r^2 + 2y^2) + 2p_2 xy \end{aligned} xcorrectedycorrected=x(1+k1r2+k2r4+k3r6)+2p1xy+p2(r2+2x2)=y(1+k1r2+k2r4+k3r6)+p1(r2+2y2)+2p2xy
其中 k 1 , k 2 , k 3 k_1, k_2, k_3 k1,k2,k3为径向畸变系数, p 1 , p 2 p_1, p_2 p1,p2为切向畸变系数。
3. 实战指南:项目运行与标定流程
3.1 环境配置
bash
# 依赖安装
pip install opencv-python numpy matplotlib3.2 数据准备
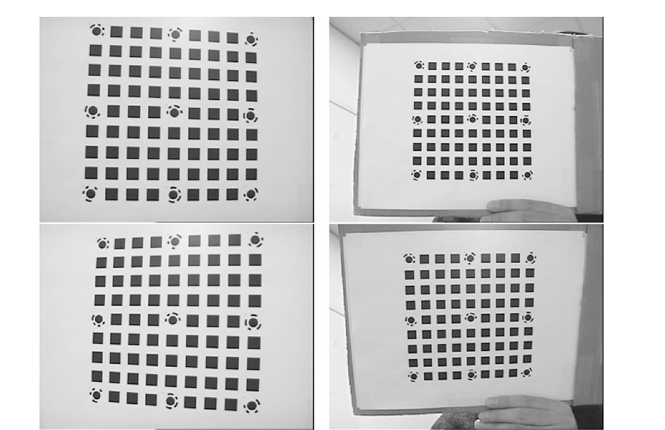
- 标定板要求 :
- 使用棋盘格(如9×6内角点),打印时需保证1:1比例且平整
- 每个方格的物理尺寸需精确测量(例如25mm×25mm)
- 图像采集 :
-
在不同角度、距离下拍摄15-20张图像(覆盖画面中心与边缘)
-
示例代码自动检测有效图像:
pythonimages = glob.glob('calib_images/*.jpg')
-
3.3 执行步骤
python
import cv2
import numpy as np
# 初始化参数
CHECKERBOARD = (9, 6) # 内角点行列数
objpoints = [] # 3D点
imgpoints = [] # 2D点
# 生成世界坐标系点
objp = np.zeros((CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[:, :2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, None)
if ret:
objpoints.append(objp)
corners_refined = cv2.cornerSubPix(gray, corners, (11,11), (-1,-1),
(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001))
imgpoints.append(corners_refined)
# 标定相机
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)3.4 结果验证
python
# 校正测试图像
img = cv2.imread('test.jpg')
h, w = img.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w,h), 1, (w,h))
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
# 计算重投影误差
mean_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2)/len(imgpoints2)
mean_error += error
print(f"重投影误差: {mean_error/len(objpoints):.2f} 像素")合格标准:误差应小于1.0像素,理想值在0.5像素以下。
4. 常见问题与解决方案
4.1 角点检测失败
- 现象 :
findChessboardCorners返回False - 原因与解决 :
- 棋盘格尺寸错误 :确认
CHECKERBOARD设置为内角点数(实际方格数-1) - 图像模糊/反光:调整光照,确保棋盘格清晰可见
- 边缘未完全显示:至少需完整显示全部内角点
- 棋盘格尺寸错误 :确认
4.2 标定结果异常
- 焦距值过大 (如fx=42880):
- 检查物理尺寸单位是否错误(例如将毫米误设为米)
- 增加图像多样性,覆盖不同视角
- 畸变校正无效 :
- 确认
dist系数已正确应用 - 尝试启用
CALIB_RATIONAL_MODEL以支持高阶畸变模型
- 确认
4.3 运行时错误
python
# 错误:Assertion failed (dims == 2 && ...)
# 解决:检查objpoints和imgpoints维度一致性
assert len(objpoints) == len(imgpoints), "数据对数量不匹配"5. 相关论文与技术演进
5.1 经典论文
-
张正友标定法(2000):
- 提出基于平面模板的灵活标定方法,成为OpenCV实现的基础
- 论文标题:A Flexible New Technique for Camera Calibration
-
多传感器标定(2019):
- 悉尼大学ACFR实验室改进VOQ策略,提升标定鲁棒性
5.2 前沿方向
- 在线标定:通过SLAM实时更新相机参数
- 深度学习标定:使用CNN直接估计畸变参数(如DeepCalib)
- 多相机协同标定:适用于自动驾驶多视角系统
6. 项目扩展建议
6.1 功能增强
- 自动化数据筛选:根据角点检测质量自动过滤低质量图像
- GUI交互界面:集成PyQt实现参数可视化调整
- ROS支持 :与
camera_calibration包对接,实现标定结果实时发布
6.2 性能优化
- GPU加速:使用CUDA加速角点检测与图像校正
- 多线程处理:并行处理图像加载与角点细化
通过本项目实践,开发者不仅能掌握相机标定的核心算法,还能深入理解计算机视觉系统的几何建模原理。结合重投影误差分析与参数优化策略,可进一步提升视觉应用的精度与鲁棒性。