环境部署
首先是环境创建,创建虚拟环境,名字叫 pengxiang
python
python -m venv pengxiang随后激活环境
python
source pengxiang/bin/activate接下来便是依赖包安装过程了:
python
pip install onnxruntime #推理框架
pip install fastapi uvicorn[standard] #网络请求与响应
pip install tensorflow #由于使用的是tflite推理,所以需要安装
pip install opencv-python #安装opencv的图像包
pip install python-multipart #解析 multipart 编码的请求体至此环境就基本安装完成了,我们启动服务:
请求处理
python
uvicorn app:app --host 0.0.0.0 --port 16566使用python发送请求
python
import cv2
import requests
# 配置服务器地址
server_url = "http://10.13.14.68:16566/api/detect/"#
# 打开摄像头
cap = cv2.VideoCapture(0) # 参数 0 表示默认摄像头
i=0
while True:
# 读取一帧图像
ret, frame = cap.read()
if not ret:
print("无法读取摄像头数据!")
break
# 将图像编码为 JPEG 格式
_, img_encoded = cv2.imencode(".jpg", frame)
files = {"file": ("frame.jpg", img_encoded.tobytes(), "image/jpeg")}
# 设置 distance 参数
params = {"distance": 6} # 这里可以动态设置 distance 的值
try:
# 发送 POST 请求
response = requests.post(server_url, files=files, params=params,verify=False) # 忽略 SSL 验证
result = response.json()
i=i+1
print("检测次数:", i)
# 处理返回结果
print("检测结果:", result)
except Exception as e:
print(f"请求失败: {e}")
# 释放资源
cap.release()
cv2.destroyAllWindows()请求结果,可以看到基本稳定在350毫秒作用,足够满足我的要求

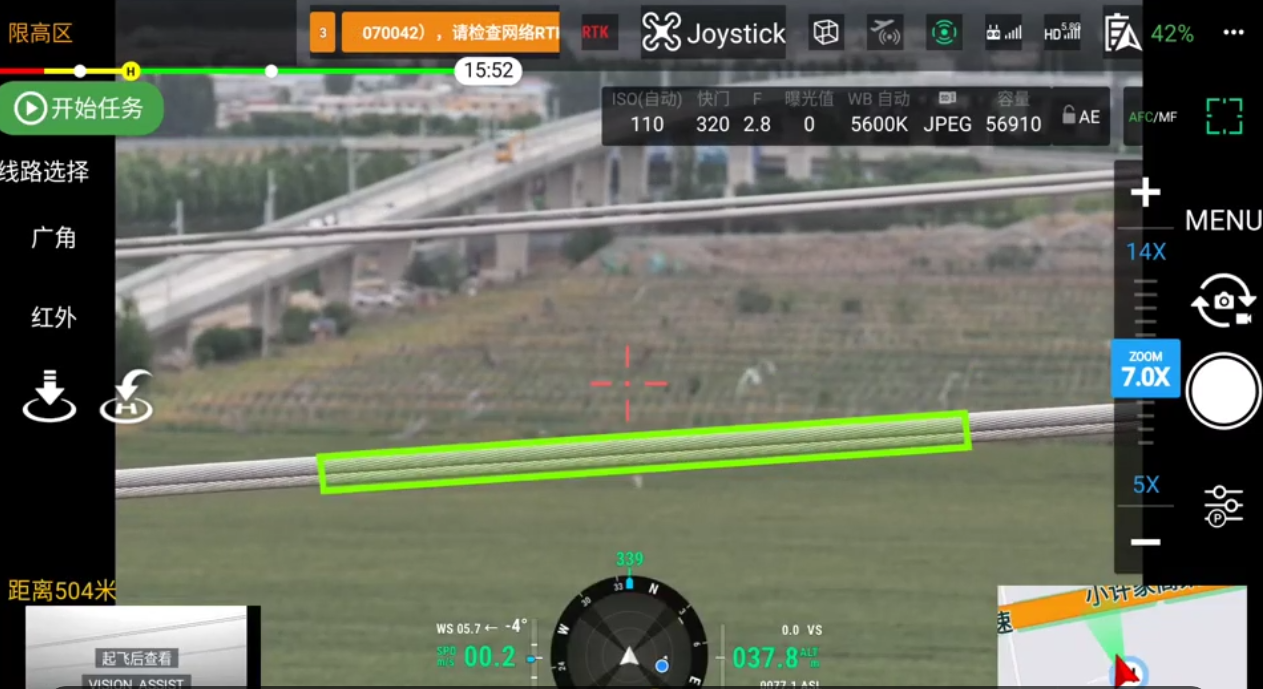
我们看一下最终的实现效果: