目录
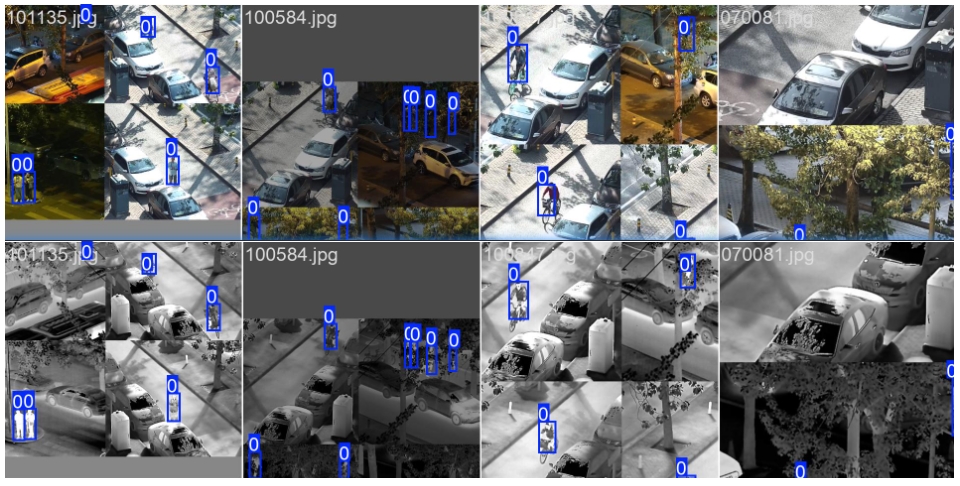
YOLOFuse 是基于 Ultralytics YOLO 框架构建的增强型目标检测系统,专为多模态 感知任务设计。本框架创新性地引入双流处理架构,支持RGB与红外(IR)图像 的协同分析与特征融合,显著提升复杂环境(低照度、烟雾遮挡、极端天气等)下的检测鲁棒性。适用于安防监控、灾害救援、工业巡检等关键场景。
github代码: https://github.com/WangQvQ/YOLOFuse
■ 技术特性
异构数据融合:实现RGB与IR图像(可扩展至RGB-D等模态)的端到端联合处理
兼容YOLOv8 API:保留原生接口规范,确保用户迁移成本最小化
可扩展融合模块:提供多层次融合策略,支持:
✅ 数据级融合(Data-level Fusion)
✅ 决策级融合(Decision-level Fusion)
✅ 早期特征融合(Early-level Feature Fusion)
✅ 中期特征融合(Mid-level Feature Fusion)
✅ 极简融合(Easy-level Feature Fusion)
✅ DEYOLO(arxiv)
■ LLVIP基准测试结果
|----------------------------|------------|----------------|-----------------|----------------|-------------------|-------------------|----------------------|
| 模型架构 | 模态 | 精度 (P) | 召回率 (R) | mAP@50 | mAP@50:95 | 模型大小 (MB) | 计算量 (GFLOPs) |
| YOLOv8n (baseline) | RGB | 0.888 | 0.829 | 0.891 | 0.500 | 6.20 | 8.1 |
| YOLO-Fuse-中期特征融合 | RGB+IR | 0.951 | 0.881 | 0.947 | 0.601 | 2.61 | 3.2 |
| YOLO-Fuse-早期特征融合 | RGB+IR | 0.950 | 0.896 | 0.955 | 0.623 | 5.20 | 6.7 |
| YOLO-Fuse-决策级融合 | RGB+IR | 0.956 | 0.905 | 0.955 | 0.612 | 8.80 | 10.7 |
| YOLO-Fuse-极简融合 | RGB+IR | 0.899 | 0.865 | 0.939 | 0.620 | 7.83 | 8.5 |
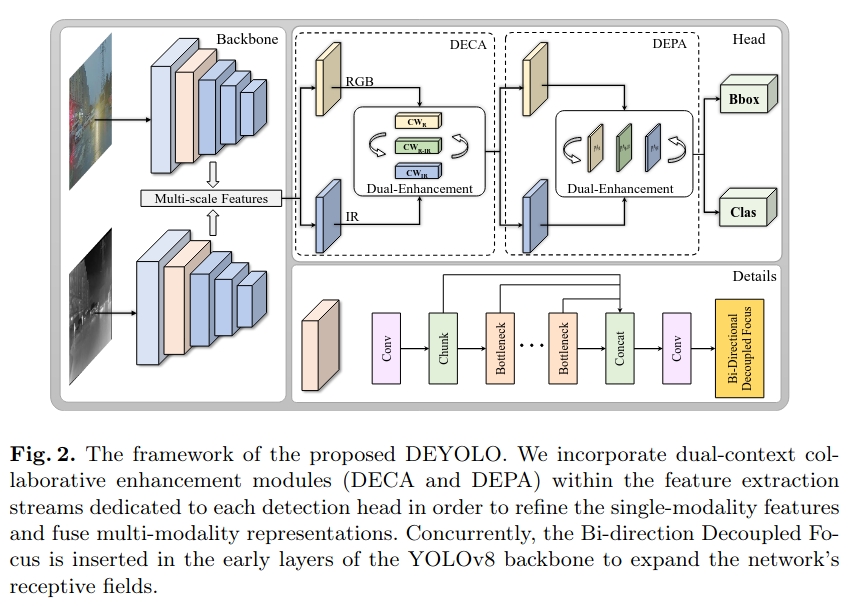
| DEYOLO | RGB+IR | 0.943 | 0.895 | 0.952 | 0.615 | 11.85 | 16.6 |
■ 数据输入规范
系统通过文件名自动关联异构数据源,需**++++确保文件命名一致性++++**.
数据集目录/
├── images/ # RGB图像
│ └── 120270.jpg
└── imagesIR/ # 红外图像(同级目录)
└── 120270.jpg # 同名IR文件
标注文件仅需基于RGB图像生成,系统自动复用至IR模态.
■ 快速部署指南
① 环境初始化
bash
git clone https://github.com/WangQvQ/YOLOFuse.git
cd YOLOFuse
pip install -e . # 可编辑模式安装② 模型训练
融合配置文件:ultralytics/cfg/models/fuse/
bash
python train_dual.py # 启动双流训练③ 推理验证
bash
python infer_dual.py # 执行融合推理预训练权重下载
链接:https://pan.quark.cn/s/ec13c6e17b8d 提取码:HETx
④代码
- infer_dual.py
python
from ultralytics import YOLO
if __name__ == "__main__":
model = YOLO("runs/train/RGB-IR/weights/best.pt")
model.predict(
source="ultralytics/assets/LLVIP/images",
save=True, # 保存预测结果
imgsz=640, # 输入图像的大小,可以是整数或w,h
conf=0.25, # 用于检测的目标置信度阈值(默认为0.25,用于预测,0.001用于验证)
iou=0.45, # 非极大值抑制 (NMS) 的交并比 (IoU) 阈值
show=False, # 如果可能的话,显示结果
project="runs/predict", # 项目名称(可选)
name="exp", # 实验名称,结果保存在'project/name'目录下(可选)
save_txt=False, # 保存结果为 .txt 文件
save_conf=True, # 保存结果和置信度分数
save_crop=False, # 保存裁剪后的图像和结果
show_labels=True, # 在图中显示目标标签
show_conf=True, # 在图中显示目标置信度分数
vid_stride=1, # 视频帧率步长
line_width=3, # 边界框线条粗细(像素)
visualize=False, # 可视化模型特征
augment=False, # 对预测源应用图像增强
agnostic_nms=False, # 类别无关的NMS
retina_masks=False, # 使用高分辨率的分割掩码
)- train_dual.py
python
from ultralytics import YOLO
if __name__ == "__main__":
model = YOLO("ultralytics/cfg/models/fuse/easy-fuse.yaml")
model.train(
data="ultralytics/cfg/datasets/LLVIP.yaml",
ch=6, # 多模态时设置为 6 ,单模态时设置为 3
imgsz=640,
epochs=100,
batch=64,
close_mosaic=0,
workers=16,
device="0",
optimizer="SGD",
patience=0,
amp=False,
cache=True, # disk 硬盘,速度稍快精度可复现;ram/True 内存,速度快但精度不可复现
project="runs/train",
name="easy-fuse",
resume=False,
fraction=1, # 只用全部数据的 ?% 进行训练 (0.1-1)
)- val_dual.py
python
from ultralytics import YOLO
model = YOLO("runs/train/easy-fuse/weights/best.pt")
model.val(
data="ultralytics/cfg/datasets/LLVIP.yaml",
ch=6, # 多模态时设置为 6 ,单模态时设置为 3
)■ 数据集结构
采用标准YOLO格式,目录结构示例如下:
python
datasets/
├── images/
│ ├── train/ # RGB训练集
│ └── val/ # RGB验证集
├── imagesIR/ # IR图像集(与images目录同级)
│ ├── train/
│ └── val/
└── labels/ # 统一标注文件
├── train/
└── val/■扩展
▲常见模态组合与应用场景
- 可见光图像:擅长捕捉颜色和细节,但在夜间、低光或复杂天气(如雾霾)环境下性能显著下降。
- 红外热成像:不受光照影响,能感知温度差异,适用于夜间监控、安防等场景,但缺乏颜色信息。
- 激光雷达(LiDAR):提供精准的三维位置和深度信息,解决遮挡和距离感知问题,广泛应用于自动驾驶和机器人领域。
- 毫米波雷达:在恶劣天气(如暴雨、大雾)中穿透性强,可与相机融合提升检测可靠性。
常见模态组合:
- RGB+红外热成像(IR):适用于夜间监控、安防等场景。例如,监控系统白天用RGB摄像头捕捉彩色图像,夜间通过红外热像仪检测人体热辐射,融合后检测精度较单模态有很大提升。
- RGB+深度(LiDAR):在自动驾驶和机器人领域应用广泛。摄像头识别物体类别,激光雷达提供三维位置和深度信息,解决遮挡和距离感知问题。
- 其他组合:如毫米波雷达+相机(恶劣天气检测)。
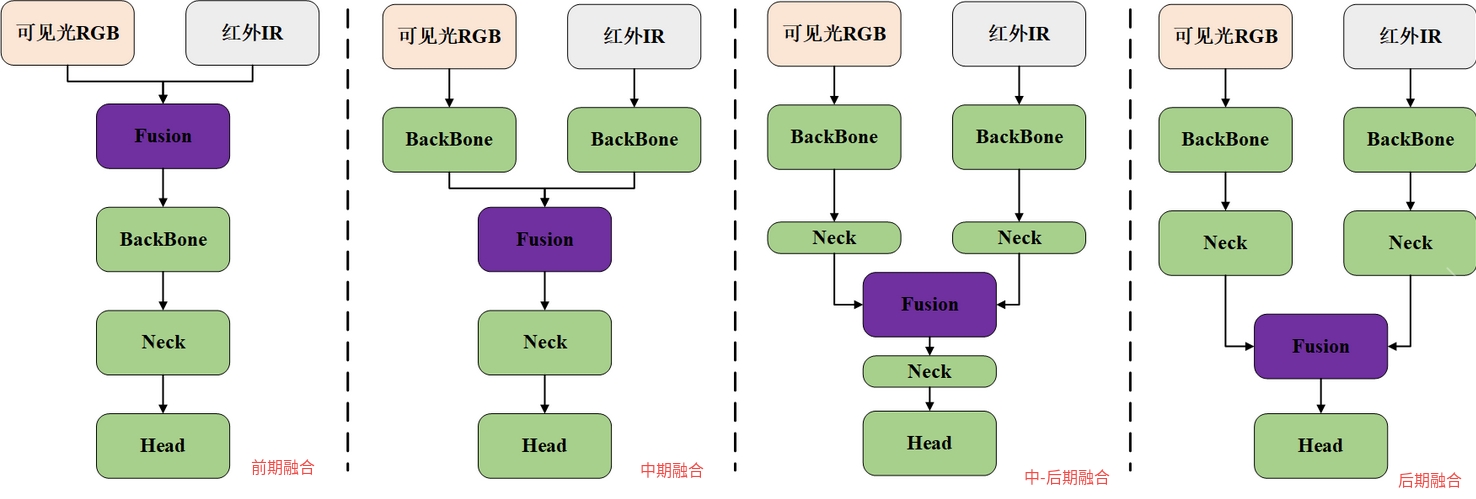
▲融合方式
- 数据级融合:直接拼接原始数据(如像素级叠加),保留全部细节,需严格空间对齐,适用于硬件配准良好的场景,为下图中的(a)前期融合。
- 特征级融合:提取各模态特征后整合(如级联、注意力机制),计算效率与精度平衡,是主流方法。早期融合(b)、中-后期融合(c)、后期融合(d)均属于此范畴。
- 决策级融合:独立检测后合并结果(如加权平均、投票),实时性强且容错性高,适合快速集成现有模型。
至此,本文的内容就结束了。