
-
作者: Sebastien Boiteau, Fernando Vanegas, Felipe Gonzalez
-
单位:昆士兰科技大学电气工程与机器人学院,昆士兰科技大学机器人中心
-
论文标题:Framework for Autonomous UAV Navigation and Target Detection in Global-Navigation-Satellite-System-Denied and Visually Degraded Environments
-
论文链接:https://www.mdpi.com/2072-4292/16/3/471/pdf?version=1706191544
-
出版信息:Remote Sens. 2024, 16(3), 471; https://doi.org/10.3390/rs16030471
主要贡献
-
提出了适用于GNSS拒止和低能见度环境下的自主无人机导航和目标检测框架:该框架将问题建模为部分可观测马尔可夫决策过程(POMDP),并成功应用于搜索和救援(SAR)任务中,展示了在复杂环境下的自主探索和目标检测能力。
-
在真实环境中验证了框架的有效性:通过软件在环(SITL)仿真和真实飞行测试,证明了该框架在资源受限的硬件平台上运行的可行性和高效性,特别是在低能见度条件下使用热成像进行目标检测的能力。
-
将深度学习检测模型与POMDP框架集成:利用热成像相机和YOLOv5目标检测模型,实现了在无人机上实时检测目标,并将其与POMDP框架相结合,提高了系统在复杂环境下的适应性和鲁棒性。
研究背景
-
无人机在应急救援中的重要性 :
-
随着气候变化和极端天气事件的增加,自然灾害的频率和严重性也在上升。
-
无人机(UAV)因其能够快速覆盖大面积区域、执行危险任务以及在复杂环境中自主导航的能力,已成为搜索和救援(SAR)任务中的重要工具。
-
-
现有技术的局限性 :
-
传统的无人机自主导航和目标检测技术通常依赖于全球导航卫星系统(GNSS)和良好的视觉条件。
-
然而,在许多实际的SAR任务中,如地下环境、浓烟或低光照条件下,GNSS信号可能不可用,视觉信息也可能受到严重干扰,这限制了无人机的应用范围。
-
-
研究动机 :
-
为了解决上述问题,本文提出了一种能够在GNSS拒止和低能见度环境下自主导航和检测目标的无人机框架。
-
该框架旨在提高无人机在复杂环境中的自主性和可靠性,使其能够更有效地执行SAR任务。
-
研究方法
问题建模
-
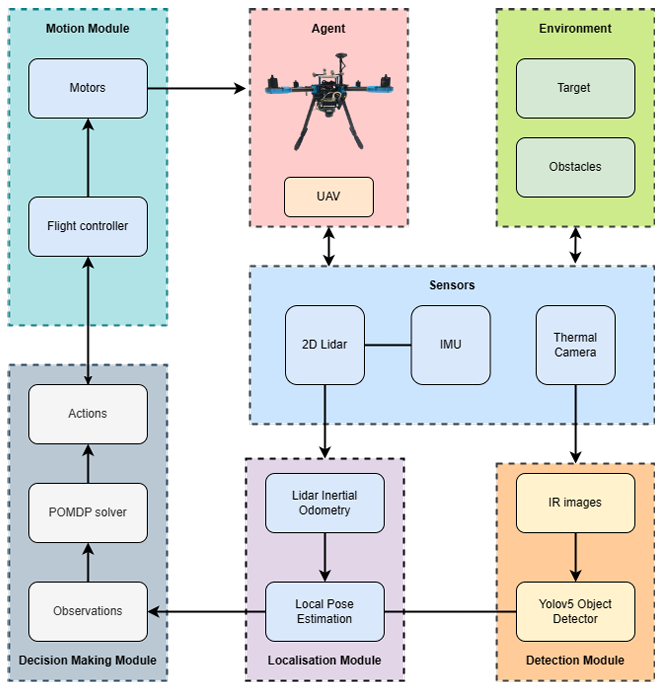
部分可观测马尔可夫决策过程(POMDP):本文将无人机的导航和目标检测问题建模为POMDP,以处理由于缺乏GNSS信号和低能见度带来的不确定性。POMDP通过状态空间、动作空间、观测空间、转移函数、观测函数和奖励函数等元素来描述问题。
-
状态空间:包括无人机的位置和姿态、目标的位置以及是否检测到目标等状态。
-
动作空间:定义了无人机可以执行的动作,如前进、后退、左移、右移、上升和下降。
-
观测空间:包括无人机的当前位置估计、目标的观测信息以及是否接近障碍物等。
-
奖励函数:设计了奖励函数来引导无人机的行为,例如,当无人机检测到目标时给予正奖励,当无人机碰撞障碍物或离开指定区域时给予负奖励。
决策模块
- ABT算法:本文使用了自适应信念树(ABT)算法来求解POMDP模型。ABT算法能够在任务执行过程中实时更新策略,以适应环境的变化。
目标检测模块
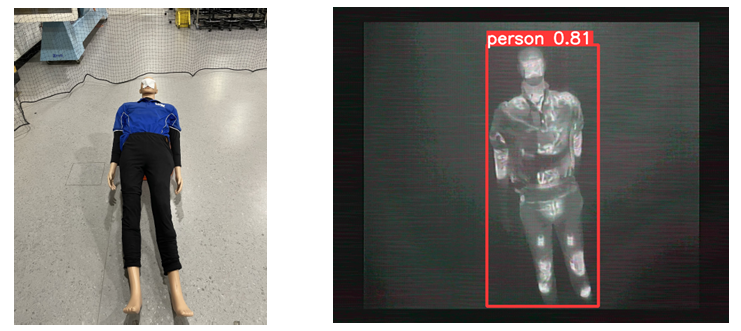
- 热成像相机与YOLOv5模型:利用FLIR TAU2热成像相机获取环境的热图像,并使用YOLOv5目标检测模型来识别目标(如人体的热信号)。YOLOv5模型因其检测速度快、精度高且模型较小,适合在无人机上实时运行。
系统架构
-
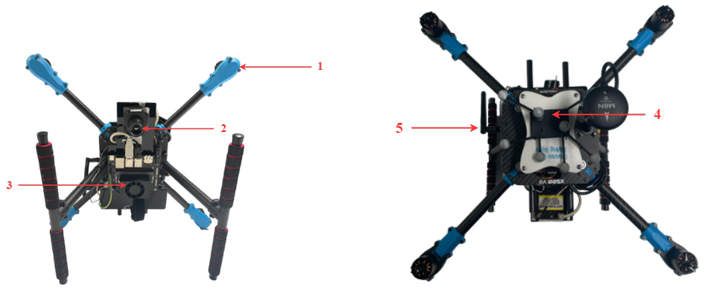
硬件平台:采用了一款重量为5kg的小型无人机,搭载了NVIDIA Jetson Orin Nano开发套件作为机载计算机,以及热成像相机、IMU等传感器。
-
软件平台:基于Ubuntu操作系统和ROS(机器人操作系统)Noetic版本进行开发,使用PX4飞控软件控制无人机的飞行。
实验
实验环境
-
仿真环境:使用Gazebo仿真软件搭建了一个9m×5m×3.7m的室内环境,模拟了正常能见度和低能见度(如烟雾)条件下的SAR任务场景。
-
真实环境:在澳大利亚昆士兰科技大学(QUT)的O块飞行区域进行了真实飞行测试,同样模拟了正常光照和低光照条件下的SAR任务场景。
实验设置
-
地图设置:设计了两种不同的地图布局(M1和M2),分别包含不同高度的障碍物,以测试无人机在不同环境下的导航和目标检测能力。
-
目标设置:使用一个能够模拟人体热信号的假人作为目标,分别在仿真和真实环境中进行了测试。
实验结果
-
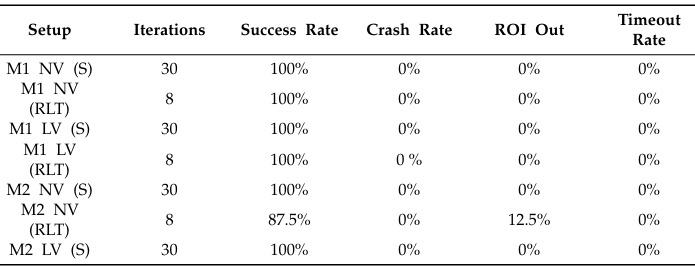
成功率:在仿真环境中,无人机在所有测试场景下均成功完成了任务,成功率为100%;在真实环境中,成功率为96.87%。
-
碰撞率和区域外率:在所有测试中,无人机均未发生碰撞,且在真实环境的M2正常能见度场景中,仅有一次因系统限制导致无人机短暂离开指定区域。
-
目标检测能力:无人机在不同能见度条件下均能准确检测到目标,展示了热成像相机和YOLOv5模型在低能见度环境下的优势。
-
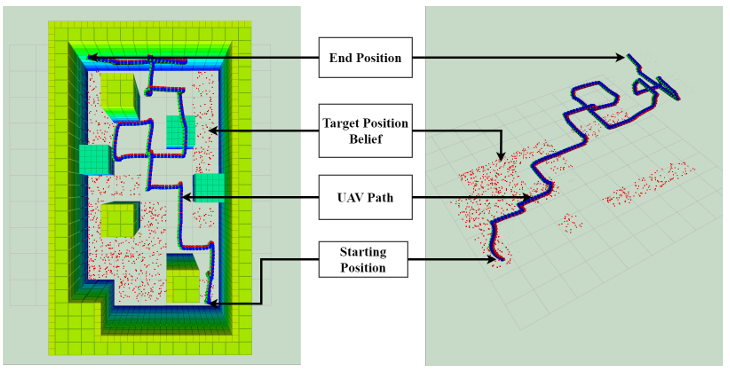
路径规划和探索能力:通过分析无人机的飞行轨迹,发现无人机能够根据POMDP策略有效地探索环境,并在检测到目标后及时调整路径。
结论与未来工作
-
结论
-
本文提出的无人机框架能够在GNSS拒止和低能见度环境下自主导航和检测目标,展示了在复杂环境下的高效性和鲁棒性。
-
通过POMDP建模和ABT算法,无人机能够实时做出最优决策,同时利用热成像技术和YOLOv5模型提高了目标检测的准确性。
-
实验结果表明,该框架在仿真和真实环境中均表现出色,为无人机在SAR任务中的应用提供了新的解决方案。
-
-
未来工作
-
改进定位模块:计划集成LIDAR或深度相机等传感器,以实现更可靠的定位和环境感知能力,减少对外部定位系统的依赖。
-
动态环境适应性:研究如何使无人机在动态环境中(如障碍物移动或环境变化)进行自主导航和目标检测。
-
优化目标检测模型:探索使用更先进的目标检测模型(如YOLOv8)以进一步提高检测性能。
-
与其他POMDP求解器的比较:通过与其他POMDP求解器的对比,评估ABT算法在该框架中的优势和局限性。
-
