鼠标坏掉了,大抵是修不好了。(全剧终---)
但是爱动手的小明不会浪费这个鼠标,确认外观没有明显烧毁痕迹后,尝试从电路板上利用光电传感器进行位移的测量,光电传感器(型号:FCT3065)找不到datasheet,但查到内核仿的是PAW3205, 因此只需要参考后者的datasheet即可。
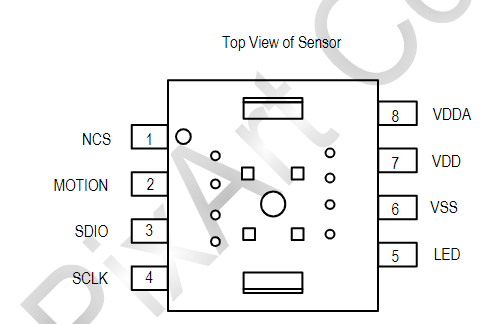
通过电路板的led找到LED引脚,确定引脚信息,开始操作
首先去掉鼠标主控芯片,然后飞线将vdd连接到电源正极,注意供电不能高于3.6v,再焊接4根杜邦线,引出SDIO、SCLK、电源正负极即可,盖上盖子,测试!
/*
Program to interface FCT3065-XY Optical Mouse
Sensor with Arduino.
This code detects when mouse is moved and also
prints the change in x direction and change in y
direction in the serial monitor.
Author: Vineet Sukhthanker
Date: 6 October 2020
*/
//Register Addresses from datasheet
#define PROD_ID1 0x00
#define PROD_ID2 0x01
#define MOTION_STATUS 0X02
#define DEL_X 0x03
#define DEL_Y 0x04
#define OP_MODE 0x05
#define CONF 0x06
#define IMG_QUALITY 0x07
#define OP_STATE 0x08
#define W_PROTECT 0x09
#define SLEEP1_SET 0x0A
#define ENTER_TIME 0x0B
#define SLEEP2_SET 0x0C
#define IMG_THRESHOLD 0x0D
#define IMG_RECOG 0x0E
const int SCLK = 13;
const int SDIO = 12;
byte noSleep = 0xA0;
int i = 0;
void setup() {
Serial.begin(115200);
pinMode (SCLK, OUTPUT);
mouseInit();
byte prodId1 = readRegister(PROD_ID1);
Serial.print((prodId1 == 0x31) ? "\nDevice OK" : "\nUnknown Device"); // checks for product ID
Serial.print(prodId1);
}
void loop() {
int motion = readRegister(MOTION_STATUS); // read motion status register
// if(motion==0x81){
Serial.print("\nMoved!");
Serial.print(motion);
int8_t delta_x = readRegister(DEL_X); // read delta x register
int8_t delta_y = readRegister(DEL_Y); // read delta y register
Serial.print("\nX:");
Serial.print(delta_x);
Serial.print(" Y:");
Serial.print(delta_y);
//}
delay(1000);
}
void mouseInit(void) // function to initialize optical sensor.
{
digitalWrite(SCLK, HIGH);
digitalWrite(SCLK, LOW);
delayMicroseconds(1); // tRESYNC = 1us (mentioned in datasheet)
digitalWrite(SCLK, HIGH);
delay(320); // tSIWTT = 320ms (mentioned in datasheet)
digitalWrite(SCLK, LOW);
writeRegister(OP_MODE, noSleep); // disable sleep mode
}
byte readRegister(byte address) {
pinMode (SDIO, OUTPUT);
for (byte i = 128; i > 0 ; i >>= 1) {
digitalWrite (SCLK, LOW);
digitalWrite (SDIO, (address & i) != 0 ? HIGH : LOW);
digitalWrite (SCLK, HIGH);
}
pinMode (SDIO, INPUT);
delayMicroseconds(3); // tHOLD = 3us (mentioned in datasheet)
byte res = 0;
for (byte i = 128; i > 0 ; i >>= 1) {
digitalWrite (SCLK, LOW);
digitalWrite (SCLK, HIGH);
if ( digitalRead (SDIO) == HIGH )
res |= i;
}
delayMicroseconds(3); // tHOLD = 3us min. (mentioned in datasheet)
return res;
}
void writeRegister(byte address, byte data) {
address |= 0x80; // MSB indicates write mode.
pinMode (SDIO, OUTPUT);
for (byte i = 128; i > 0 ; i >>= 1) {
digitalWrite (SCLK, LOW);
digitalWrite (SDIO, (address & i) != 0 ? HIGH : LOW);
digitalWrite (SCLK, HIGH);
}
for (byte i = 128; i > 0 ; i >>= 1) {
digitalWrite (SCLK, LOW);
digitalWrite (SDIO, (data & i) != 0 ? HIGH : LOW);
digitalWrite (SCLK, HIGH);
}
delayMicroseconds(100);
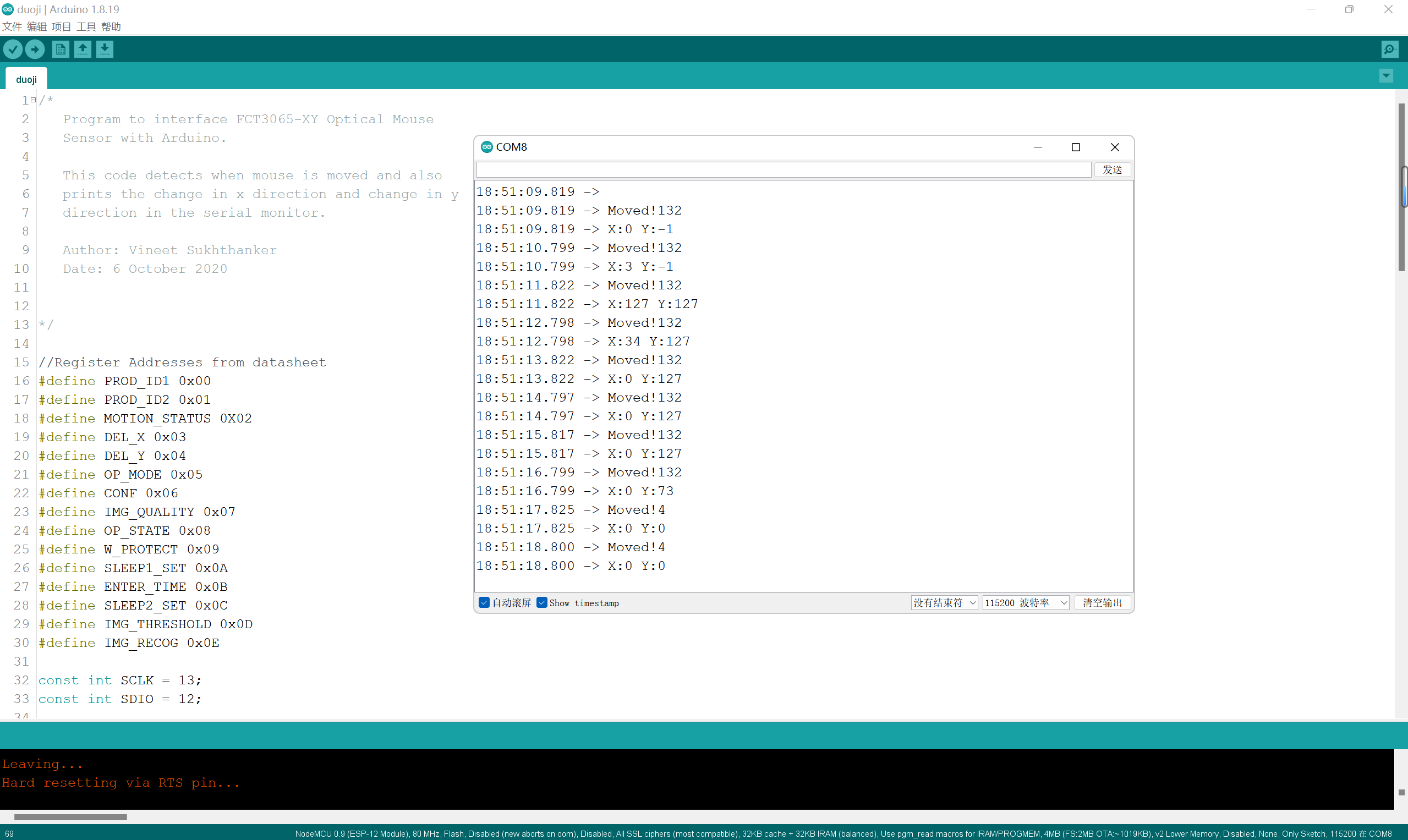
}效果如图,x和y坐标分别向下向右为正,寄存器补码形式存储8位位移量
大合照(或许旋转编码器还再可以玩一玩)

参考