在之前的文章中,我们介绍了如何登录机器人,如何实现上位机与下位机之间的互通,还介绍了机器人的topic和message,以及如何通过命令行对topic、message进行对应的操作。
接下来,我们就要运用前面所学的所有知识进行综合操作:运行机器人实现建图。
通过Gmapping能力进行建图,使用RVIZ可视化工具(ROS专用可视化工具)将数据进行可视化。
因为RVIZ可视化工具只能运行在Linux系统上,所以需要分别考虑具备了Linux系统条件和仅有Windows系统的情况。
考虑到Windows系统上建图的准备工作较多,所以我们首先介绍Windows系统上的情况。
1.Windows系统建图
1.1 构建包含Linux操作系统的容器
1.1.1 构建原因
为了实现上位机(Windows电脑)对下位机(机器人上的树莓派)的操控,需要在上位机上安装ROS系统。
又因为ROS系统是基于Linux系统开发和测试的,所以我们需要在Windows电脑中构建Linux系统,阿克曼-幻宇机器人是基于Linux系统中的Ubuntu系统进行开发和测试,所以我们构建的是Ubuntu系统环境
1.1.2 构建过程
为了简化构建过程,我们借助Docker进行环境构建。
在本地电脑中创建文件,命名为Dockerfile,文档内容:
docker pull tiryoh/ros-kinetic-desktop(直接使用包含RVIZ等全功能的容器)1.2 运行容器并与树莓派联通
1.2.1 运行容器
运行命令
docker run -it --rm tiryoh/ros-kinetic-desktop:latest在这种模式下,容器与宿主机共享网络,容器将使用宿主机的IP地址,并直接访问宿主机的网络资源。
使用宿主机网络命令
docker run -it --rm --network host tiryoh/ros-kinetic-desktop:latest1.2.2 实现容器与树莓派联通
1.2.2.1 确保容器的宿主机和机器人树莓派处于同一局域网
-
将机器人作为热点,宿主机连接机器人网络
-
声明树莓派上的ROS服务地址
export ROS_MASTER_URI=http://192.168.12.1:11311/ # 树莓派上的 URI
-
声明容器的IP地址
export ROS_HOSTNAME=192.168.12.170 # docker 内机器的 ip
-
执行命令验证是否联通
rostopic list
1.3 为Docker Ubuntu赋予GUI能力
1.3.1 把宿主机的图像权限赋予给Docker
xhost +local:docker说明:当不需要时,取消权限命令为:
xhost -local:docker1.3.2 启动带有GUI能力的容器并启动RVIZ
docker run -it --rm \
--network host \ 将宿主机网络赋予给容器
--env="DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \ 和上一行代码共同作用,把宿主机的显示能力赋予给容器
--env="ROS_MASTER_URI=http://192.168.12.1:11311" \
--env="ROS_HOSTNAME=192.168.12.78" \
--env="LIBGL_ALWAYS_SOFTWARE=1" \ 对于某些独立显卡的,采用强制软解码
--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \
tiryoh/ros-kinetic-desktop:latest
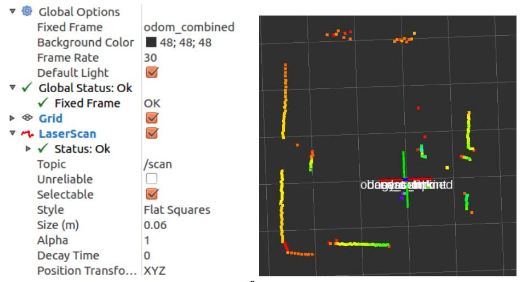
rviz即可看到 RVIZ 可视化工具已经启动,通过添加话题和选择话题名称就可以查看相应话题数据。
1.4 Gmapping建图
通过上述步骤完成环境准备、上下位机之间的联通和可视化准备后,就可以开始准备Gmapping建图。
还差在宿主机中执行的最后三个操作以实现对机器人的操控:运行机器人、打开机器人键盘控制节点和运行Gmapping建图包。
1.4.1 运行机器人
终端 1
ssh huike@192.168.12.1 # 登陆树莓派
roslaunch huanyu_robot_start Huanyu_robot_start.launch # 运行机器人1.4.2 打开机器人键盘控制节点
终端 2
ssh huike@192.168.12.1 # 登陆树莓派
roslaunch turtlebot_teleop keyboard_teleop.launch # 打开机器人键盘控制节点打开机器人键盘控制节点返回的信息我们主要关注以下信息
Control Your Turtlebot!
Moving around:
u i o
j k l
m , .
这一信息提供了机器人操作说明
1.4.3 运行Gmapping建图包
终端 3
ssh huike@192.168.12.1 # 登陆树莓派
roslaunch huanyu_robot_start gmapping_slam.launch # 运行 Gmapping 建图包说明:SSH是为了访问树莓派,并为在机器人里执行操作做准备。
在数据窗口内查看地图和机器人姿态数据。RVIZ中的消息和话题选择如下:即可看到地图、激光点、机器人的 tf 位姿数据:

完成上述三步准备工作后,按照第二部返回的操作说明移动机器人,尽量走一个闭合的曲线,使显示地图能满足整体建图需要。
2. Linux系统建图
学习了Windows系统建图后,Linux系统建图因为省去了很多环境准备、可视化等准备工作就相对容易得多了。
2.1 环境准备
-
确保Linux系统是Ubuntu系统,如果不是手动换成此系统。
-
执行命令安装包含kinetic版本、RVIZ可视化工具包:
apt install -y ros-kinetic-desktop-full
2.2 Gmapping建图
将Linux系统电脑连上机器人热点,然后打开三个终端Launch三个相关包,打开RVIZ,完成话题和消息选择。
通过键盘指令移动机器人,尽量走一个闭合的曲线,使显示地图能满足整体建图需要。
3. 扩展知识
我们详细介绍下Dockerfile命令行的确认过程,并以全功能和仅含有kinetic版本的ROS系统的拉取容器对象不同分别说明容器制作命令行的不同。
Dockerfile命令行的确认过程
-
确认机器人树莓派中运行的ROS系统版本
-
在Docker找到与之匹配的容器,然后在页面上找到对应的拉取命令
以我所使用的阿克曼-幻宇机器人ROS系统为例:
当拉取的是包含了RVIZ全功能的容器
版本为kinetic,我在Docker中找到对应的包含RVIZ可视化工具、kinetic版本ROS系统的全功能容器,找到容器构建命令。
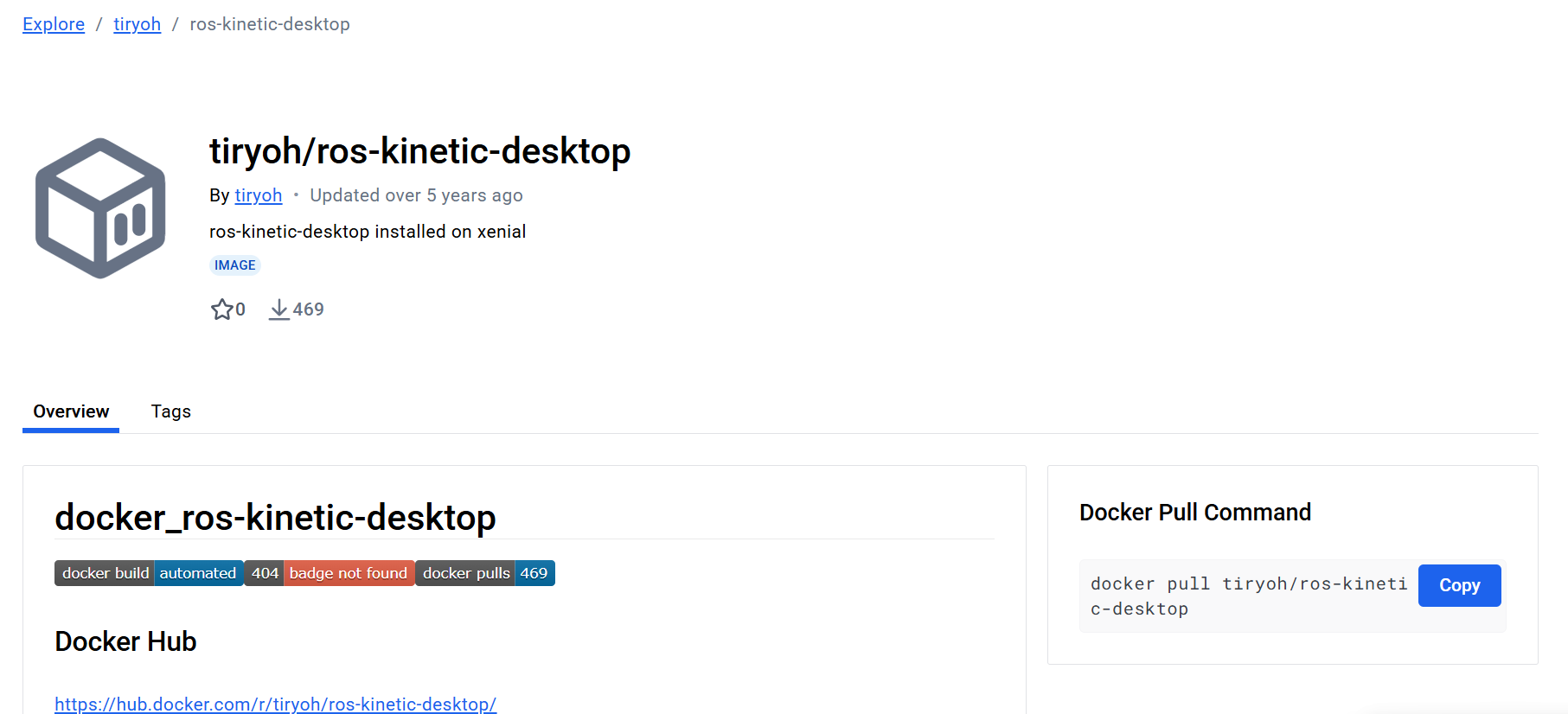
容器地址:
https://hub.docker.com/r/tiryoh/ros-kinetic-desktop/
构建语句
docker pull tiryoh/ros-kinetic-desktop(直接使用包含RVIZ等全功能的容器)当拉取的是仅包含kinetic版本ROS系统的的容器
拉取容器之后,需要执行定制化操作,比如安装RVIZ可视化工具
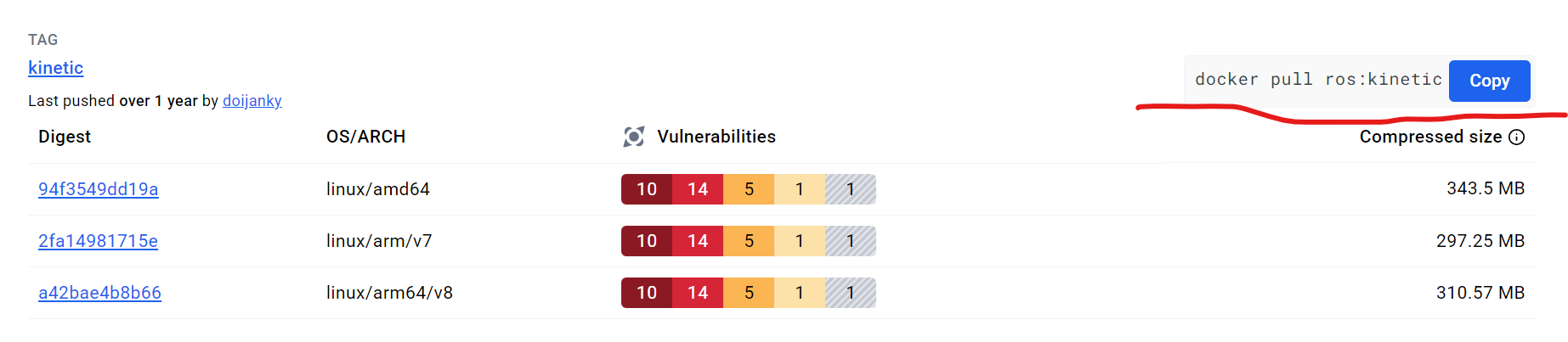
容器地址:
https://hub.docker.com/_/ros/tags?name=kine
拉取语句:
docker pull ros:kinetic执行上述命令构建的是不包含RVIZ可视化工具的容器,所以我们还需要下载对应的应用
RUN apt update && apt install -y iputils-ping net-tools && apt install -y ros-kinetic-desktop-full 更新软件包索引,安装一些网络调试工具和完整的 ROS Kinetic 桌面版本。
docker build -t my/ros_kinetic:app 构建Docker镜像这样就可以在Linux系统中运行RVIZ工具了。