1.概念
图像边缘检测是计算机视觉和图像处理中的基础任务,用于识别图像中像素值发生剧烈变化的区域,这些区域通常对应物体的边界、纹理变化或噪声。
1.1原理
图像中的边缘通常表现为灰度值的突变(如从亮到暗或从暗到亮的急剧变化)。
1.2方法
Canny 边缘检测算法是一种非常流行的边缘检测算法,是 John F. Canny 于 1986年提出的,被认为是最优的边缘检测算法。
2.滤波器选择
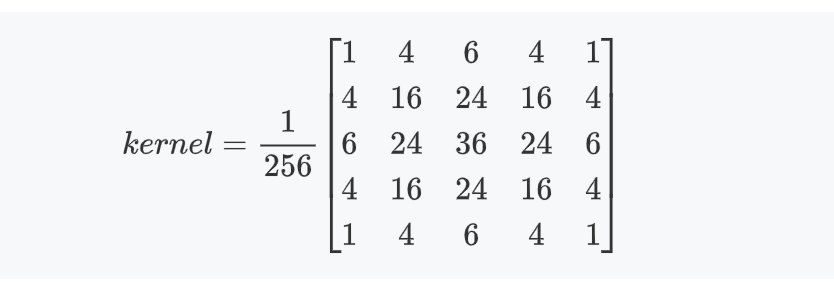
上述概念中提到边缘检测主要用于识别图像的色差变化大的区域,通常为噪声。边缘检测本省就是一种锐化操作,对噪点比较敏感,所以需要进行噪点消除。我们选择的滤波为高斯滤波。kernel=(5,5):
3.计算图像梯度与方向
计算图像的梯度和方向会用到sobel算子,sobel算子就是核值固定的卷积核,一般为(3,3):
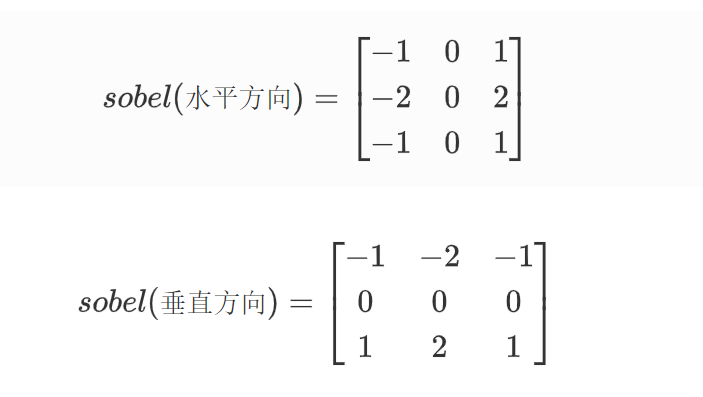
这里要注意Gx,Gy 并不只是sobel不同方向的核值,而是sobel算子与原图通过计算后得到Gx,Gy。
3.1图像梯度
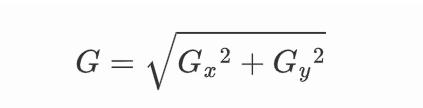
梯度其实就有点像色差变换率,导数的感觉。梯度值计算公式有两个,一个是欧氏距离计算
一个是曼哈顿街区距离:
在OpenCV中默认使用曼哈顿街区距离。
3.2图像方向
在求梯度之前,我们就已经得把Gx,Gy算出来,此时利用三角函数:
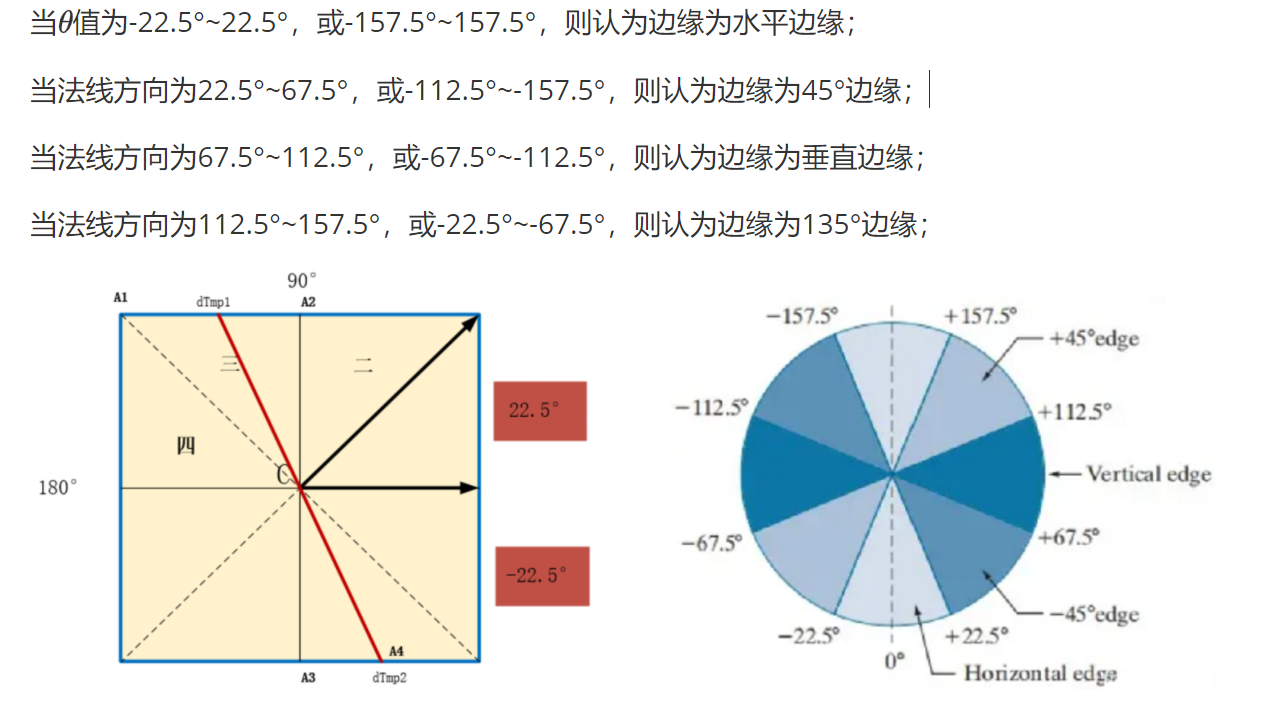
这个角度值θ就是当前边缘的梯度的方向。得到θ的值之后,就可以对边缘方向进行分类,为了简化计算过程,一般将其归为四个方向:水平方向、垂直方向、45°方向、135°方向。
4.非极大值抑制
出现原因:因为高斯滤波的原因,边缘会变得模糊,导致经过第二步后得到的边缘像素点非常多,因此我们需要对其进行一些过滤操作。
4.1作用
对得到的边缘像素进行一个排除,使边缘尽可能细一点。
4.2原理
比较G(x,y)与两个相邻像素的梯度值:G(x-1,y)和G(x+1,y)。如果G(x,y)是三个值里面最大的,就保留该像素值,否则将其抑制为零。
4.3总结
经过再一次过滤后,有些噪点被改成0,边缘就更细致,更准确。非极大值抑制的目的 是在已经计算出图像梯度幅度图像的基础上,进一步细化边缘位置,减少假响应并确保边缘轮廓的一致性和单像素宽度。
5.双阈值筛选
5.1原因
经过非极大值抑制之后,我们还需要设置阈值来进行筛选,当阈值设的太低,就会出现假边缘,而阈值设的太高,一些较弱的边缘就会被丢掉,因此使用了双阈值来进行筛选。
5.2原理
当某一像素位置的幅值超过最高阈值时,该像素必是边缘像素 ;当幅值低于最低像素时,该像素必不是边缘像素;幅值处于最高像素与最低像素之间时,如果它能**连接到一个高于阈值的边缘时,则被认为是边缘像素,**否则就不会被认为是边缘。
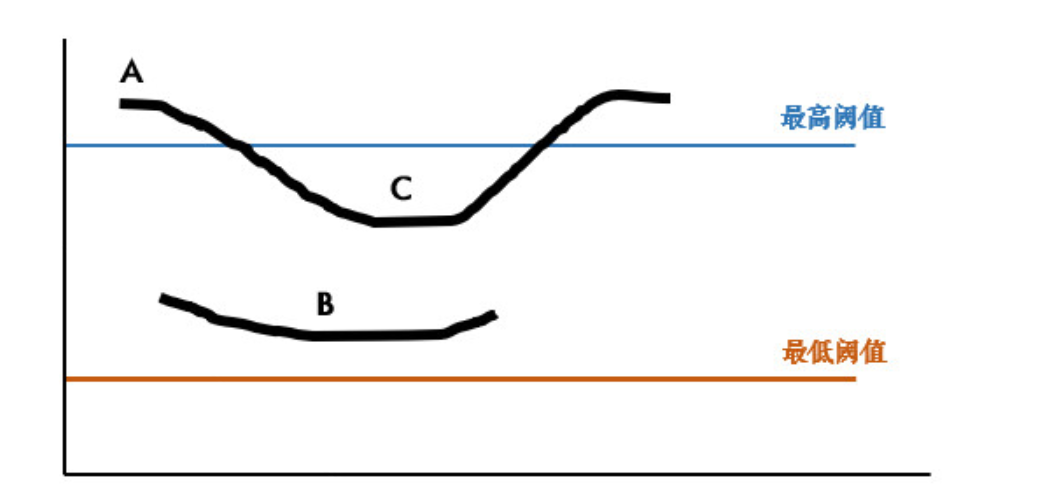
上图中的A和C是边缘,B不是边缘。因为C虽然不超过最高阈值,但其与A相连,所以C就是边缘。
5.3总结
双阈值检测的目的是基于非极大值抑制后的梯度幅值图像,通过设定高低两个阈值来区分强边和弱边,并有效连接这些边缘点构成完整的边缘线。
6.API
cv2.Canny(img,threshold1,threshold2)
img:灰度化(二值化)后的图像;
threshold1:低阈值
threshold2:高阈值
7.原理上的Canny边缘检测步骤
(1)读图
(2)二值化图像
(3)高斯滤波
(4)计算梯度和方向
(5)非极大值抑制
(6)双阈值筛选
8.代码实现
代码就简单了,因为这个API已经设定好了所有的内容,直接调用就行。
python
import cv2
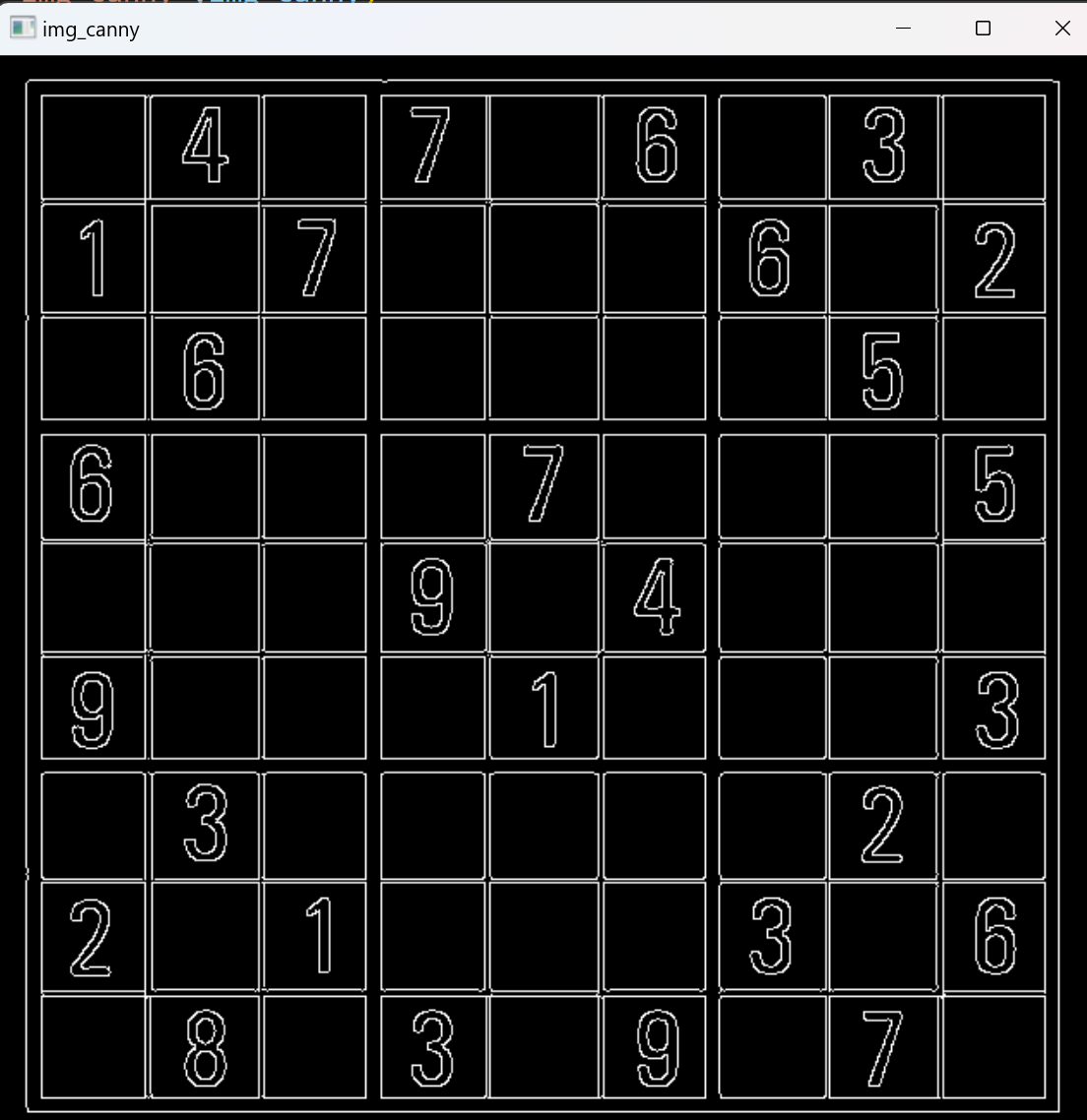
img = cv2.imread('./src/shudu.png')
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
img_canny = cv2.Canny(img_gray,threshold1=30,threshold2=170)
cv2.imshow('img_canny',img_canny)
cv2.waitKey(0)
cv2.destroyAllWindows()结果: