摘要:本文主要介绍重建大师常见空三问题,包含:POS错位、相机内参、阴影变化。
POS错位
查看自由网结果的空三报告和三维视图,若为以下表现,判定为POS错位的情况。
(1)查看空三报告
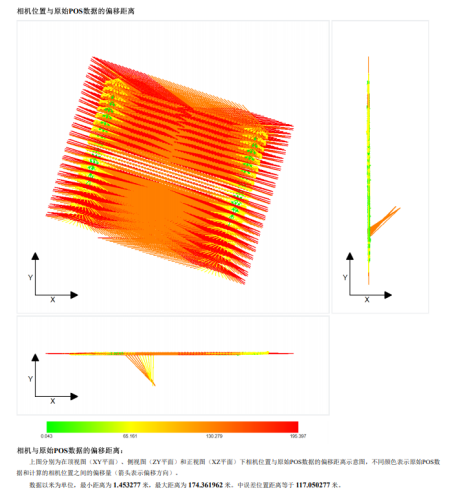
查看空三报告中,相机与原始POS数据的偏移距离。下图中红色表示偏移大,绿色表示偏移小。
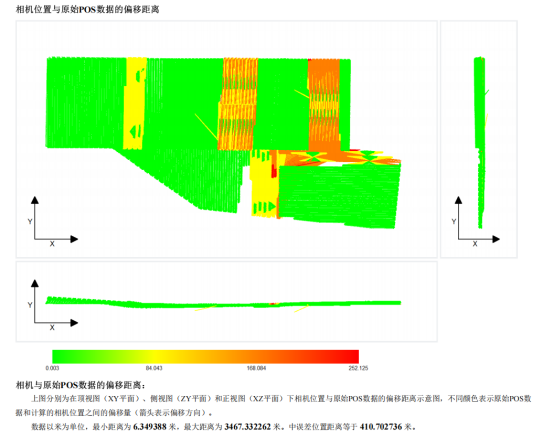
(2)查看空三三维视图
功能列表中的" "显示POS功能,即为原始导入POS,鼠标放置在照片三角锥上,原始POS会高亮,按航线移动检查原始POS是否也按航线移动,若出现原始POS多航线跳动的情况,即为原始输入POS有错位问题。
"显示POS功能,即为原始导入POS,鼠标放置在照片三角锥上,原始POS会高亮,按航线移动检查原始POS是否也按航线移动,若出现原始POS多航线跳动的情况,即为原始输入POS有错位问题。
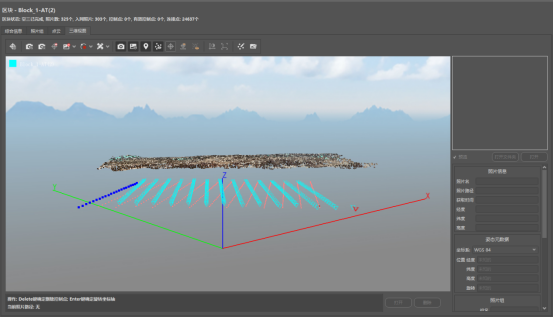
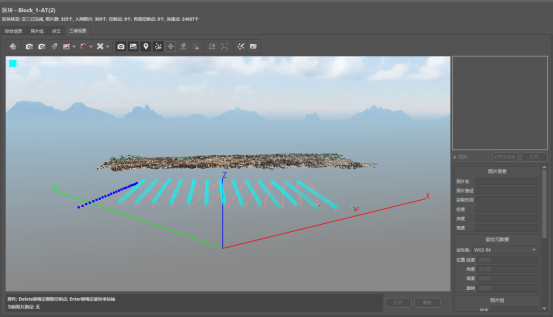
1.1情况一:全部POS错位
红色点为原始导入的每张照片的POS信息,深蓝色点为未入网照片,蓝色三角锥为入网照片。图中显示空三结果和原始导入的POS结果完全不对应,实际情况为导入POS信息时未使用照片名称对应。
解决方法:
①有未入网影像,删除所有POS,重做自由网空三,空三结果有错误的位置尺度,通过控制点做定位。
②提交空三时,更多设置中,影像对生成选择穷举,空三结果有错误的位置尺度,通过控制点做定位。
③删除错误的POS,重做自由网空三,空三结果有正确的位置和尺度。(具体操作更困难)
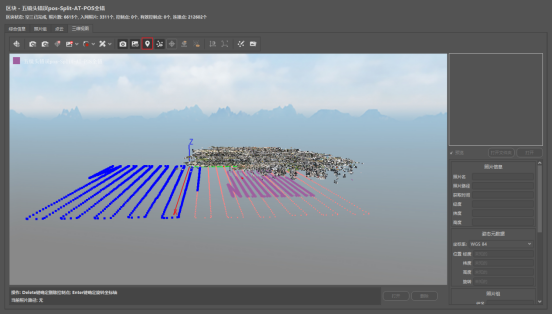
1.2情况二:部分POS错位
空三结果计算出的照片位置与输入POS位置不一致,航飞数据有大量照片不入网。
图中红色点为原始导入的每张照片的POS信息,蓝色点为未入网照片,紫色三角锥为入网照片。图中显示空三结果和原始导入的POS结果完全不对应,且空三尺度异常,POS文件中照片名称与位置对应有误。
解决方法:
全部照片POS错误的情况:照片对生成"穷举"再次提交可解决空三不入网问题。
部分架次POS错误的情况:删除错误POS架次的位置信息(无POS信息的数据匹配过程中使用的匹配策略为穷举),提交空三。

①有未入网影像,删除所有POS,重做自由网空三,空三结果有错误的位置尺度,通过控制点做定位。
②提交空三时,更多设置中,影像对生成选择穷举,空三结果有错误的位置尺度,通过控制点做定位。
③删除错误的POS,重做自由网空三,空三结果有正确的位置和尺度。(具体操作更困难)
注:大面积空三出现POS错位问题时,请使用手动分块,并确保手动分块时,错误POS均被删除。
2.相机内参
2.1内参不一致
软件界面提示"相机内参不一致",提示的照片和软件获取到的照片组内参不一致,有以下两种解决方式。
解决方式一:按照片分辨率整理照片;
解决方式二:重新导入照片,导入时选择地面导入的方式。
2.2焦距不一致
重建大师中,一个照片组下的所有照片,使用一套相机内存,导入照片时按文件夹拆分照片组,在采集过程中,使用不同设备、不同焦距、照片自动旋转等情况,应人工将不同参数的照片存放在不同的文件夹下。
3.阴影变化
航拍区域光照变化导致的阴影变化大,相邻航线分别为上午和下午分开拍摄的情况,空三大量丢片。在两个架次交接处出现某一个架次全部丢片的情况,可复制自由网空三结果,只保留下视影像,查看两个架次间接边处下视影像情况。
案例:粉红色与高亮绿色分别为两个架次。两张截图中红框内,从下往上数第十条航线处照片全部不入网。
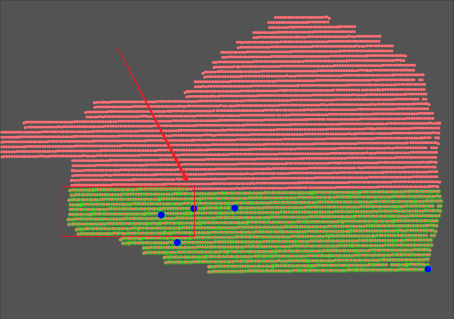
图 2 数据管理界面截图
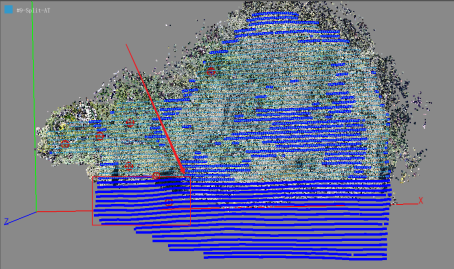
图 2 自由网空三截图
下图为相邻原始照片,照片阴影变化太大,重叠区域在照片上的表现完全不同。
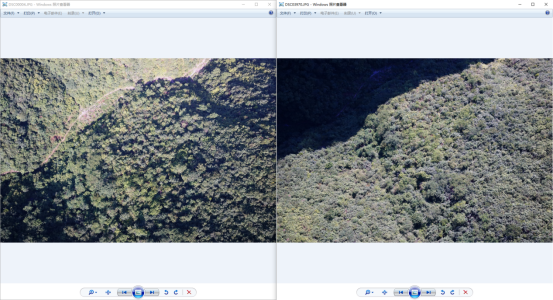
图 3 架次相邻处下视影像对比图
解决方法:
内业解决:将上下分开空三,通过空三取点,刺控制点的方式将两个空三合并。
外业解决:通过外业重新航飞重新采集解决。
外业建议:
空三丢片是影像采集问题导致的,外业航飞采集数据时,尽量避开晴天上午下午分开采集相邻架次数据。
山区阴影导致的问题比较严重,推荐航飞时间为9:00~15:00。
对城市数据,本身纹理丰富,阴影变化的影响较小,推荐航飞时间为9:00~17:00。