Occupancy Grid Map & Euclidean Signed Distance Field:
【注意】:目的是为了将有噪声的传感器收集起来,用于实时的建图。
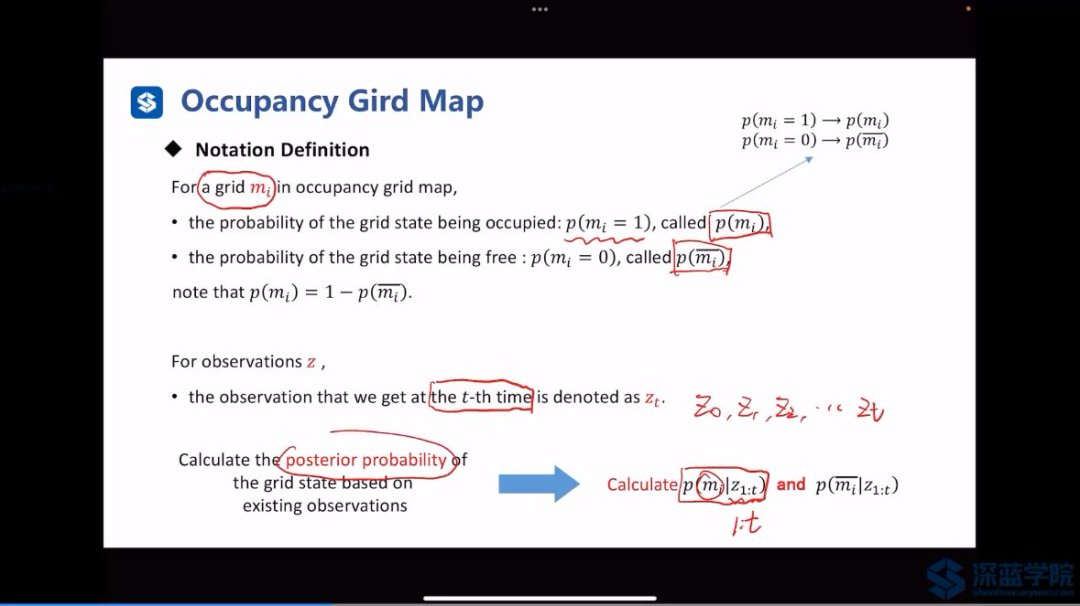
Occupancy Grid Map:
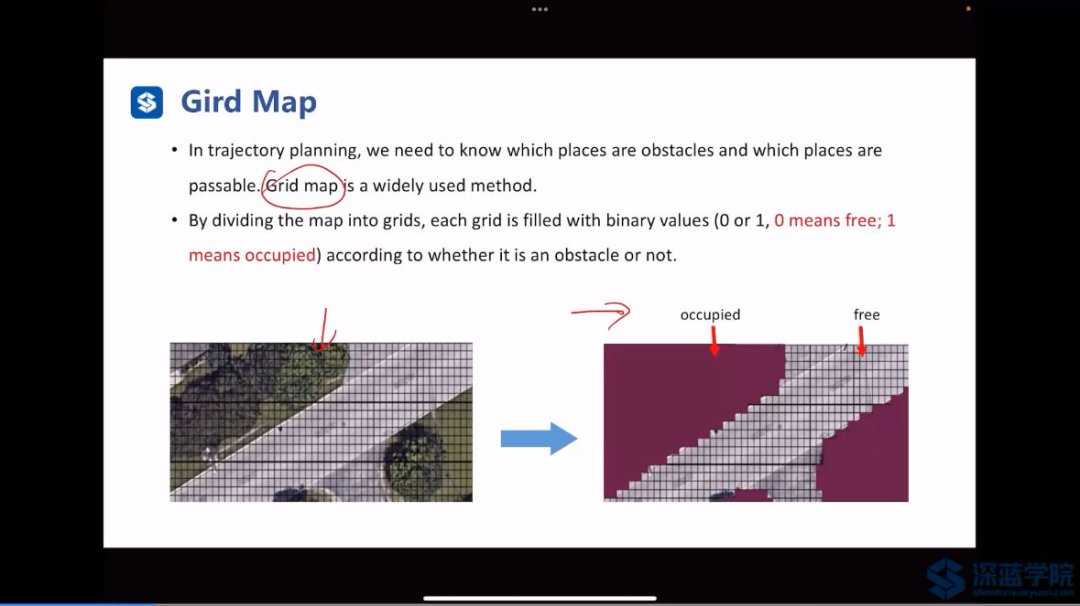
概率栅格:
【注意】:由于传感器带有噪声,在实际中基于所有观测到这个栅格的情况,来计算这个栅格的是否有障碍物的后验概率。
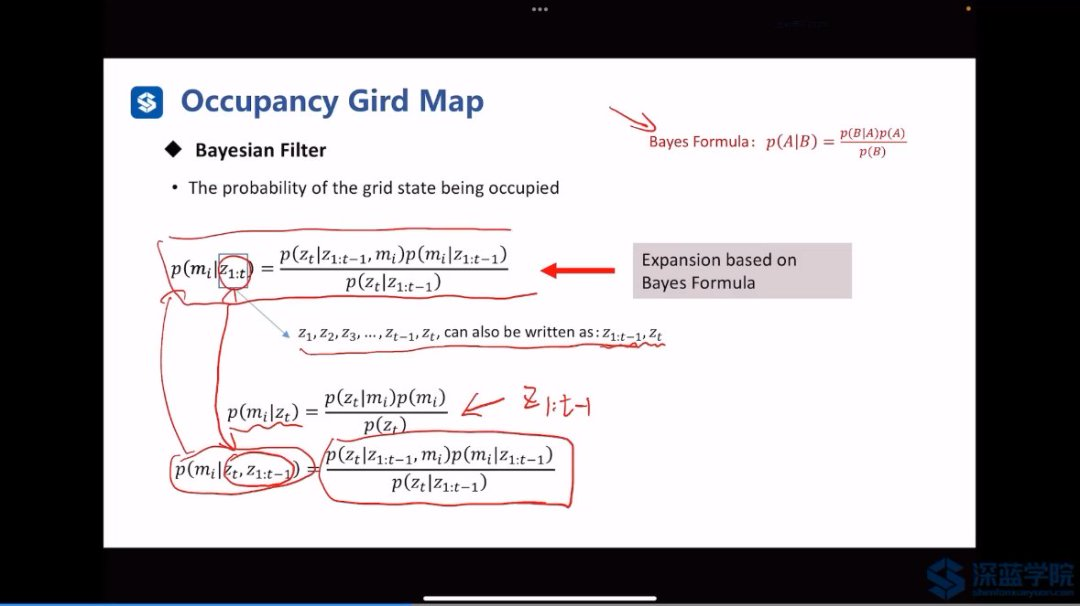
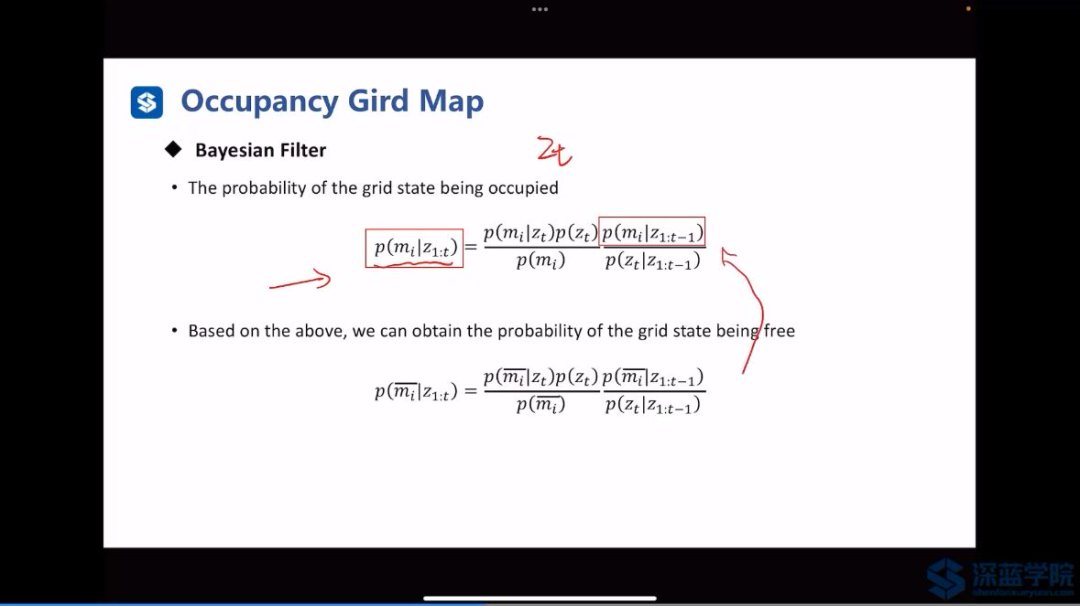
公式化后验概率部分:
贝叶斯概率公式:
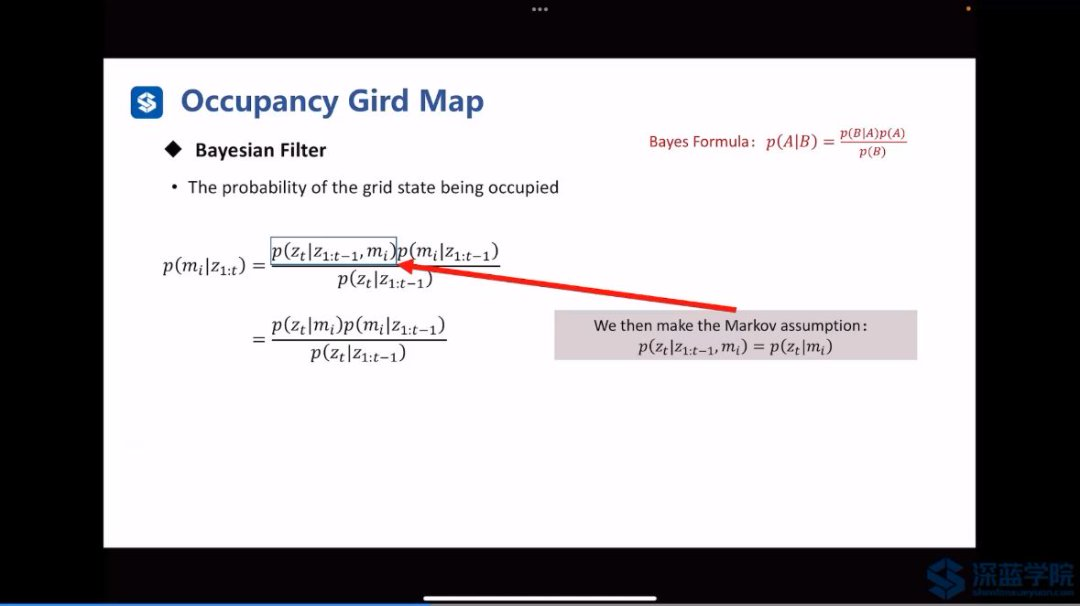
Markov 假设前一次观测跟后一次观测独立无关:
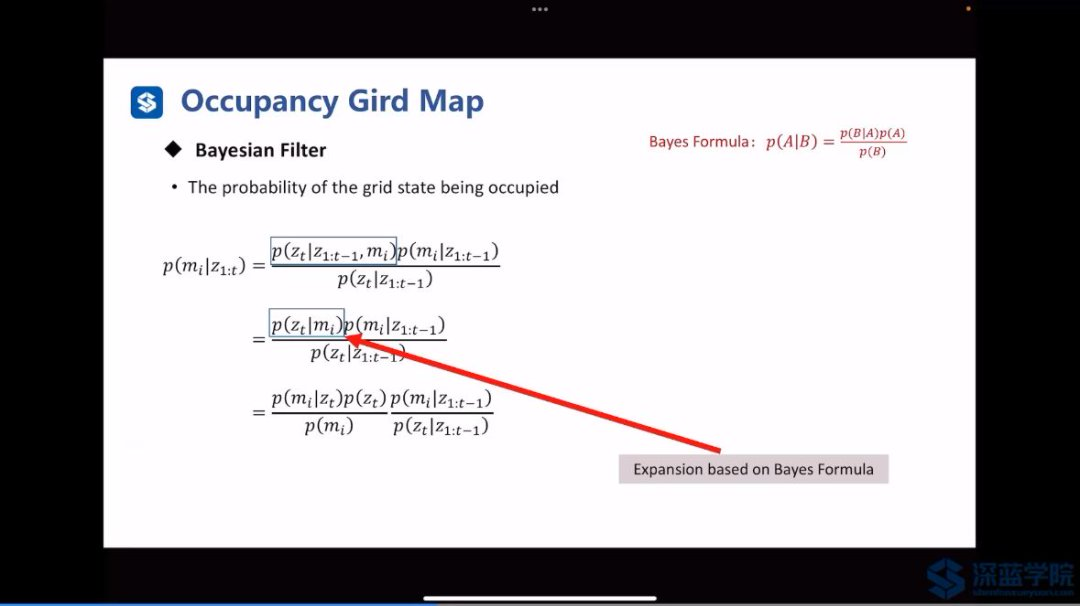
再进行一次贝叶斯展开:
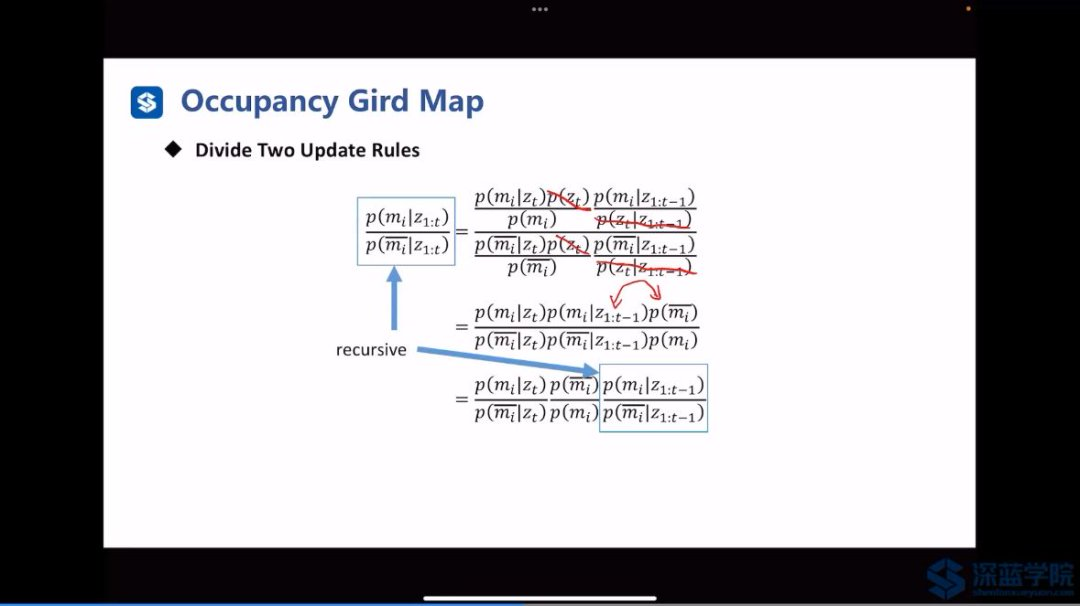
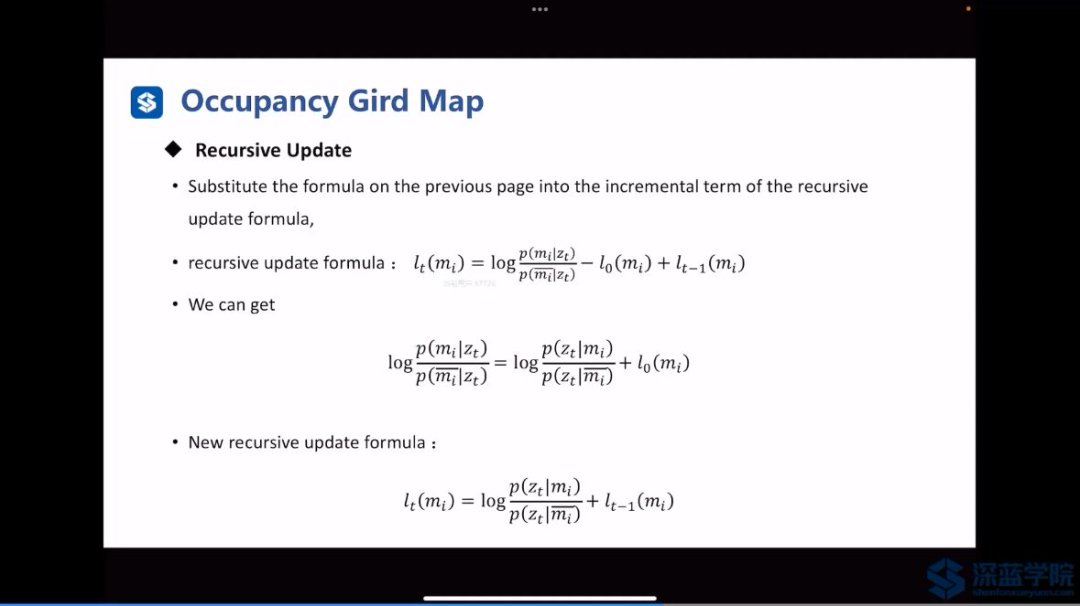
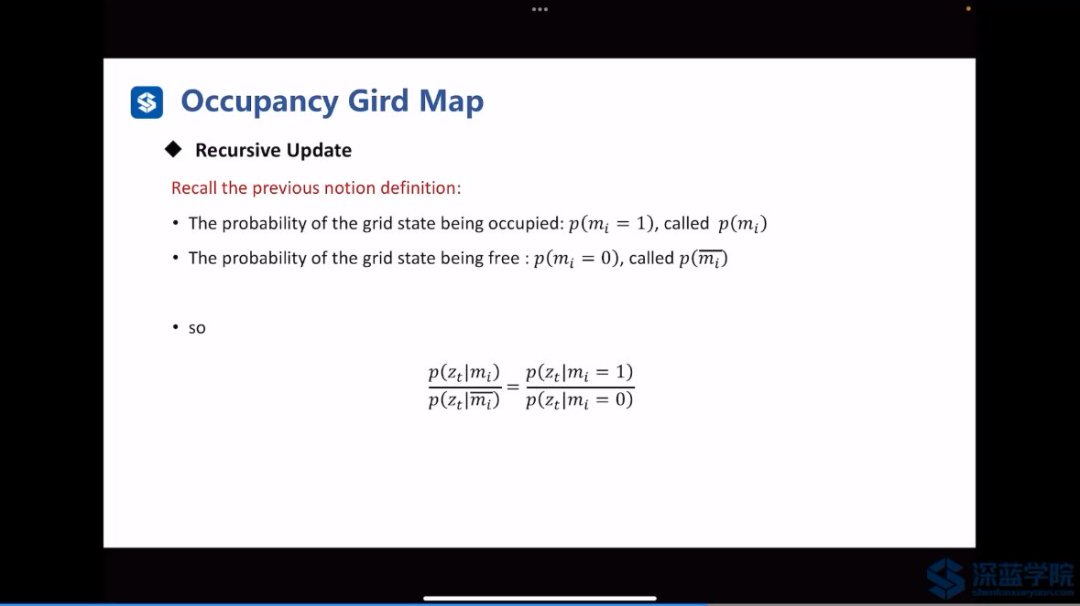
将occupied 和 free的概率全部都写出来:
进行简化,凸显关系:
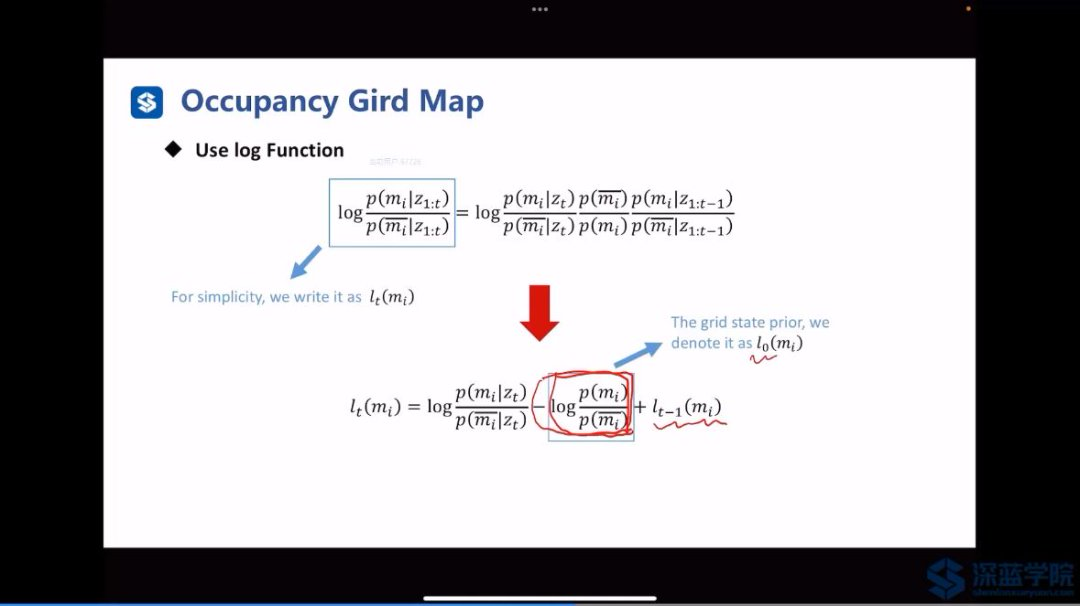
逆传感器模型:
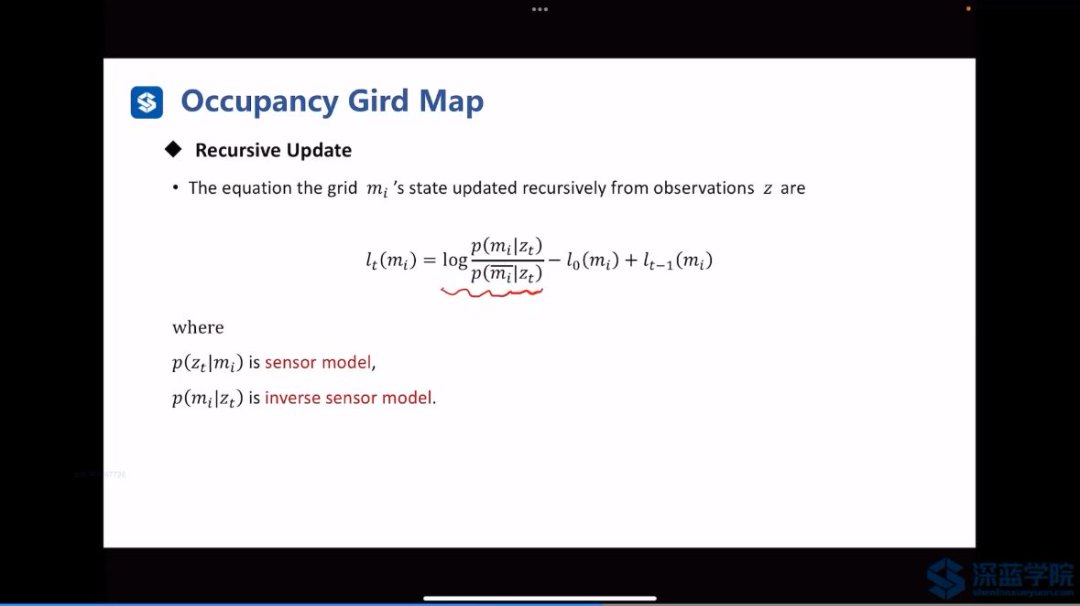
新的递推更新公式:
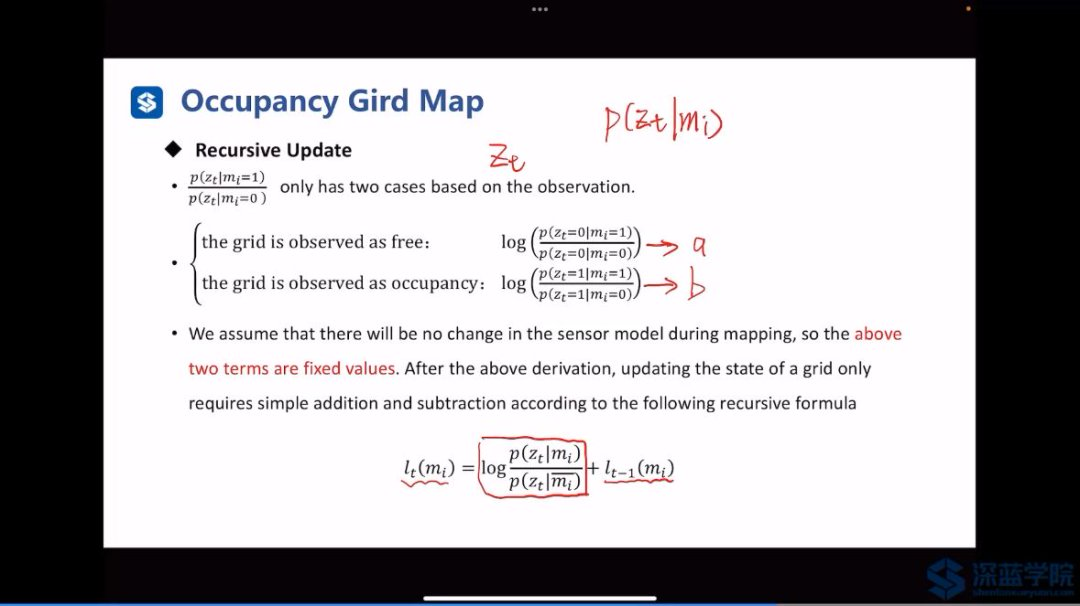
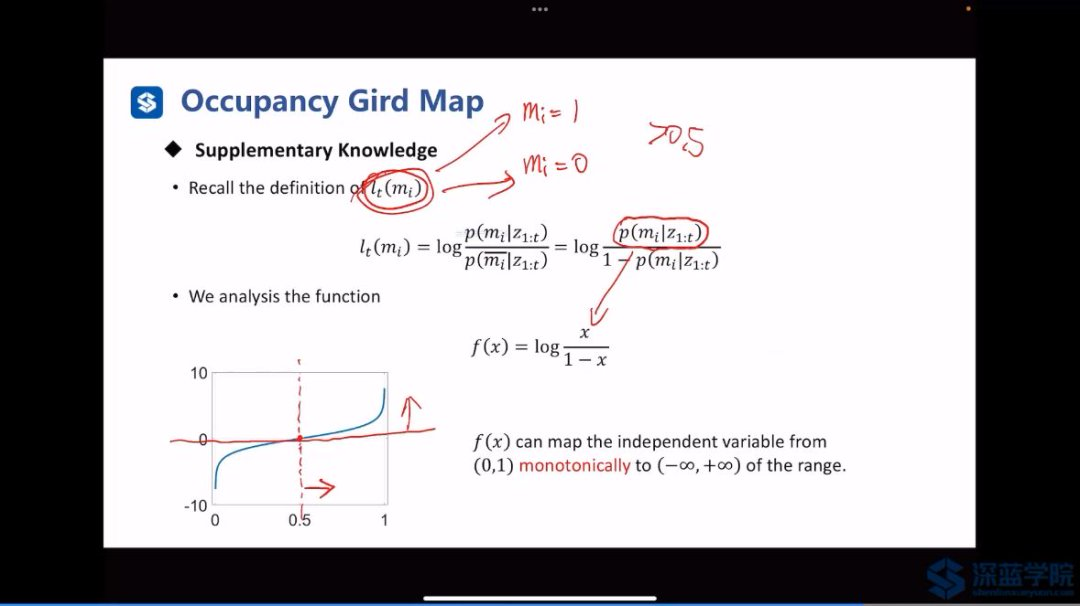 占据栅格地图总结:
占据栅格地图总结:
示意图:
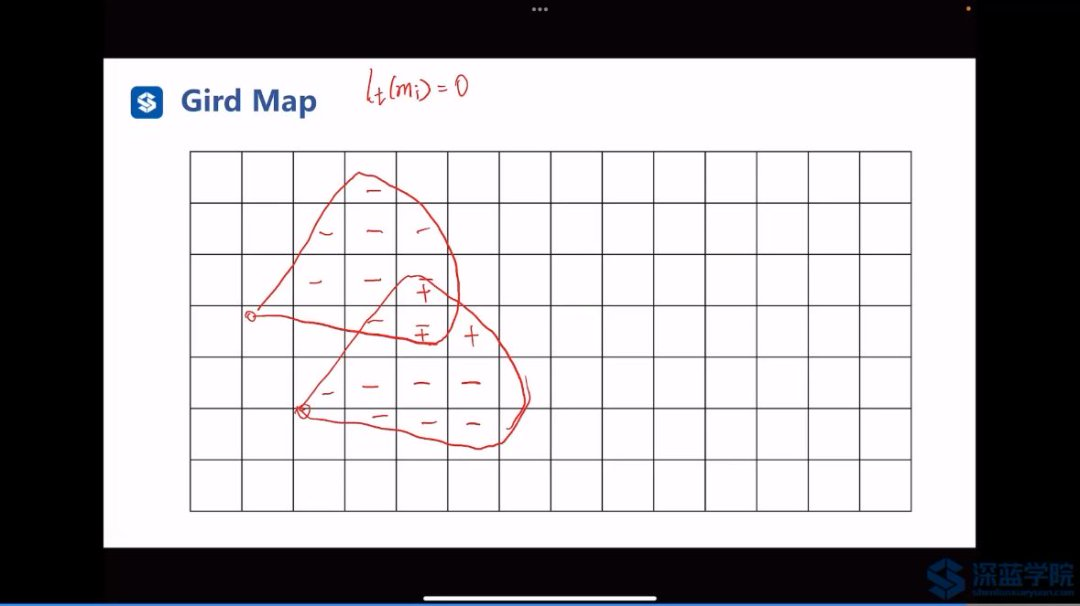
【注意】:如果观测到为free,则减,如果观测到的是occupied,则加。
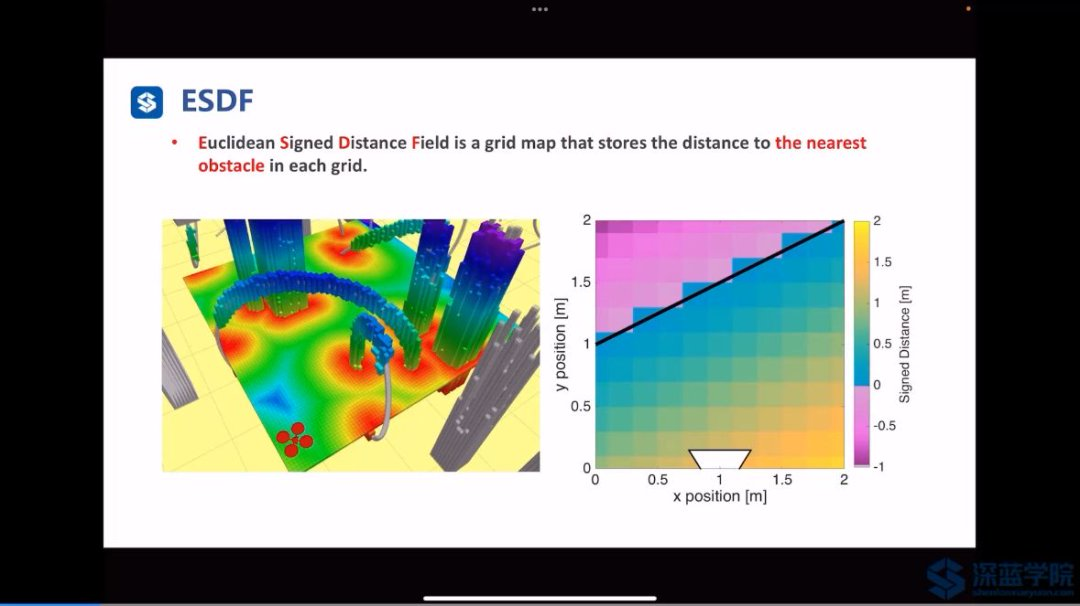
ESDF地图:
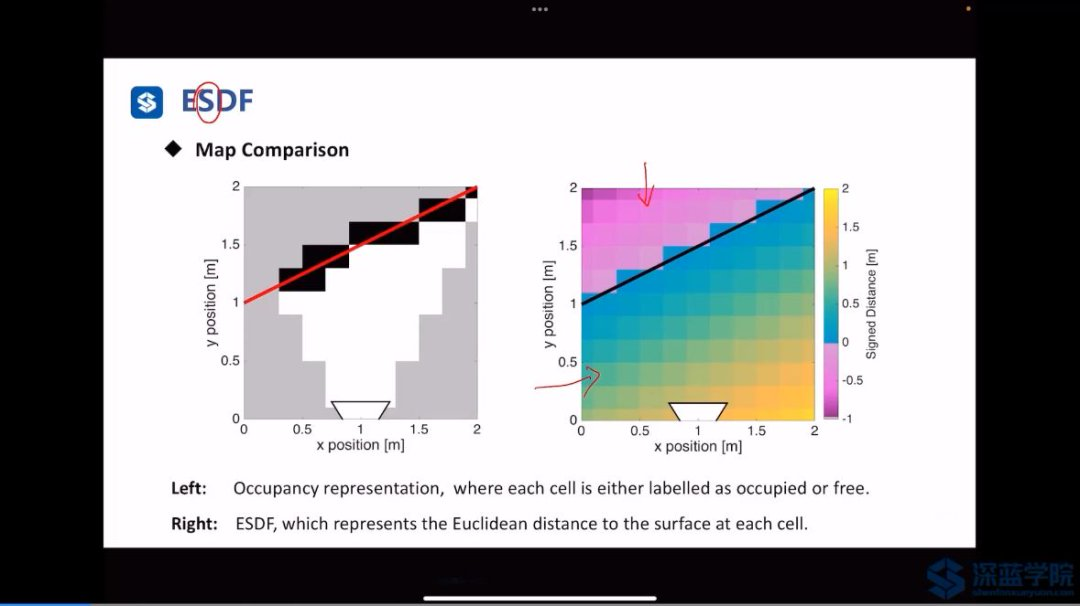
粉红色区域为负值,因为其为障碍物区域,存储的是到free栅格的距离,但是要加负号。
多种建立的方法:
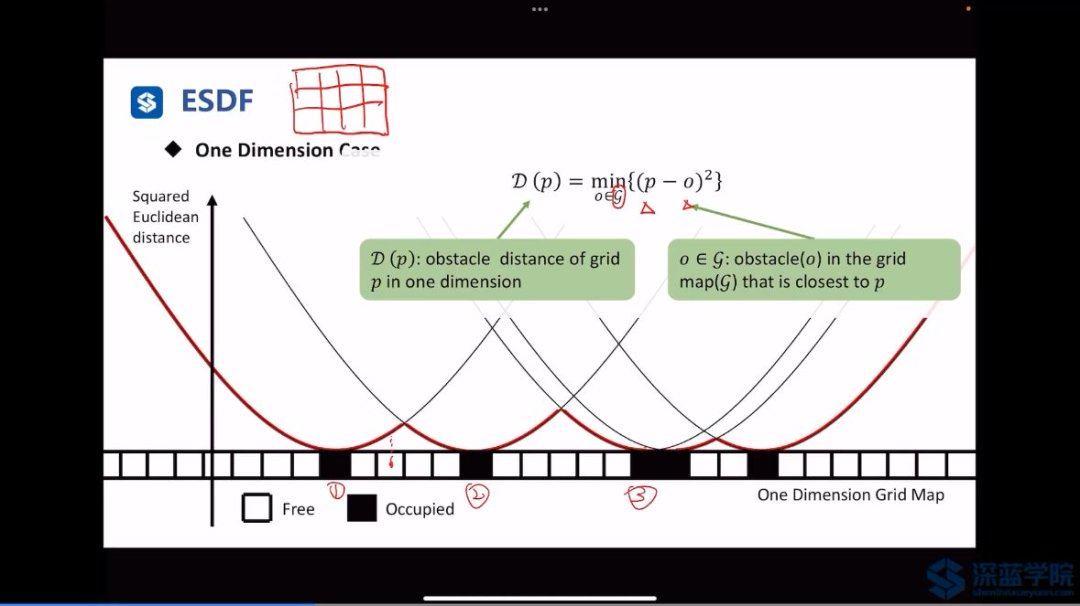
基本思想,求取下包络:
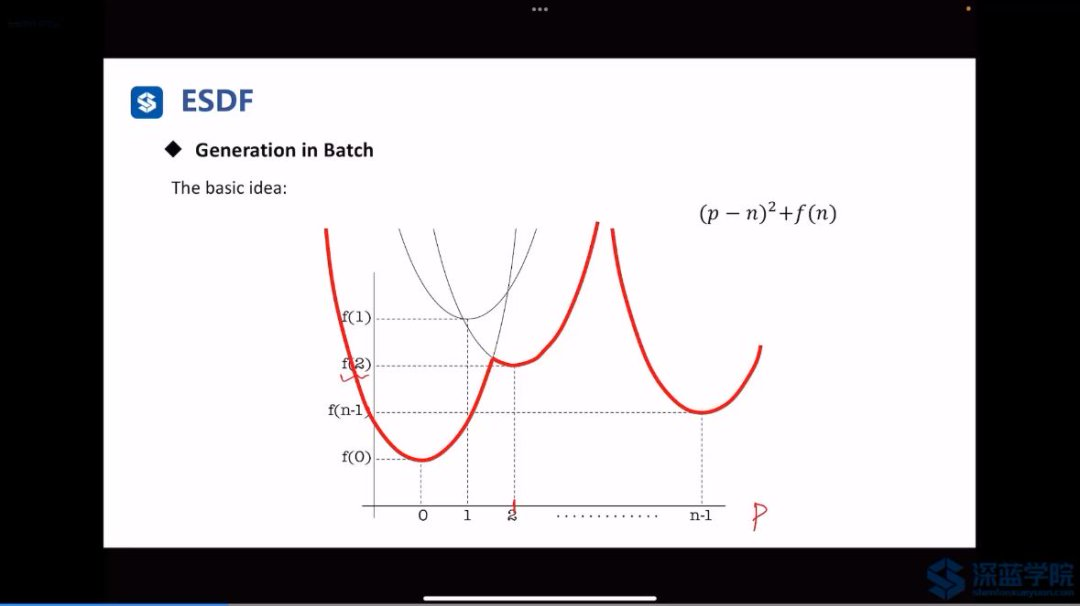
到最近障碍物的距离的平方就是下包络:
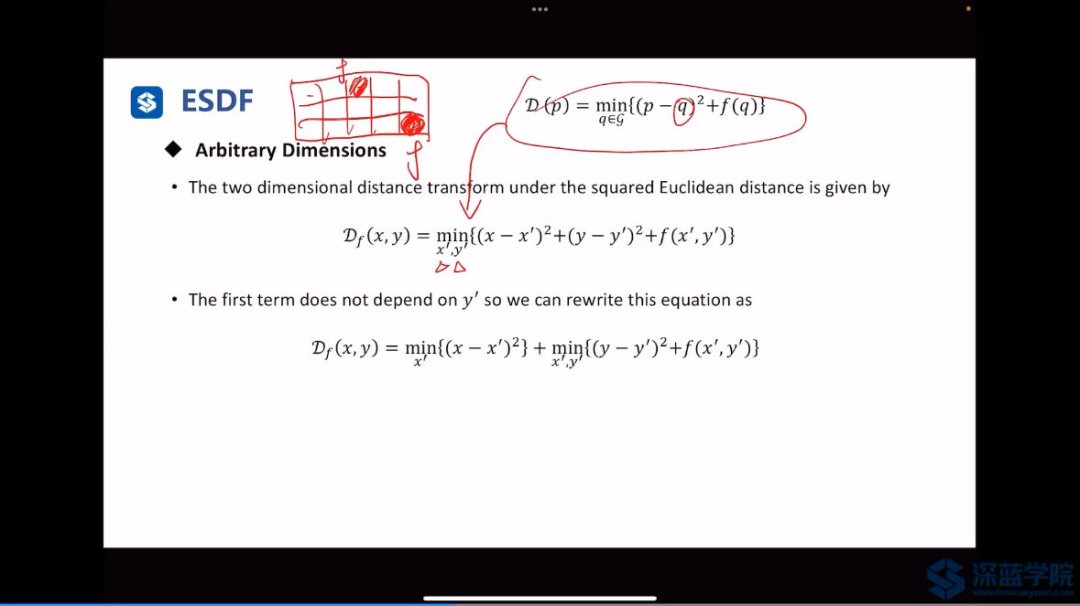
通用的形式:
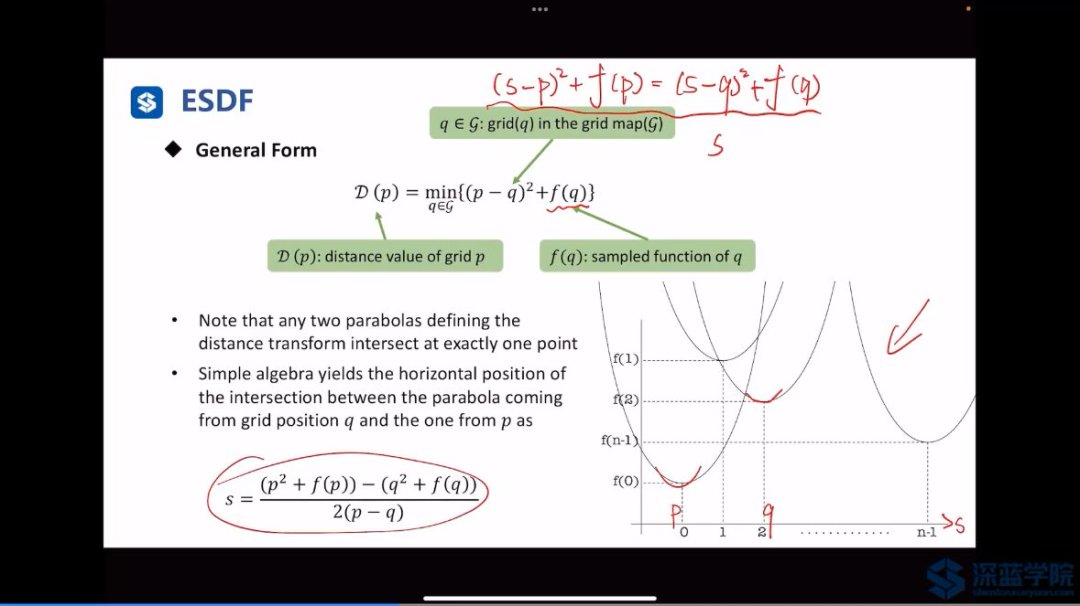
在多维情况下的作用才能体现。
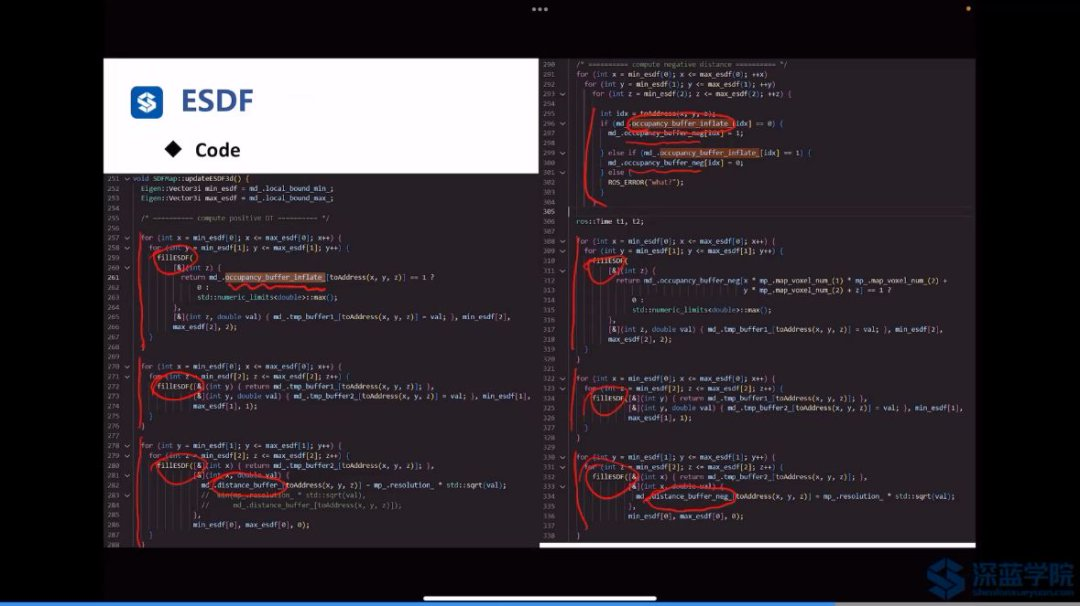
多维下的 计算:
计算:
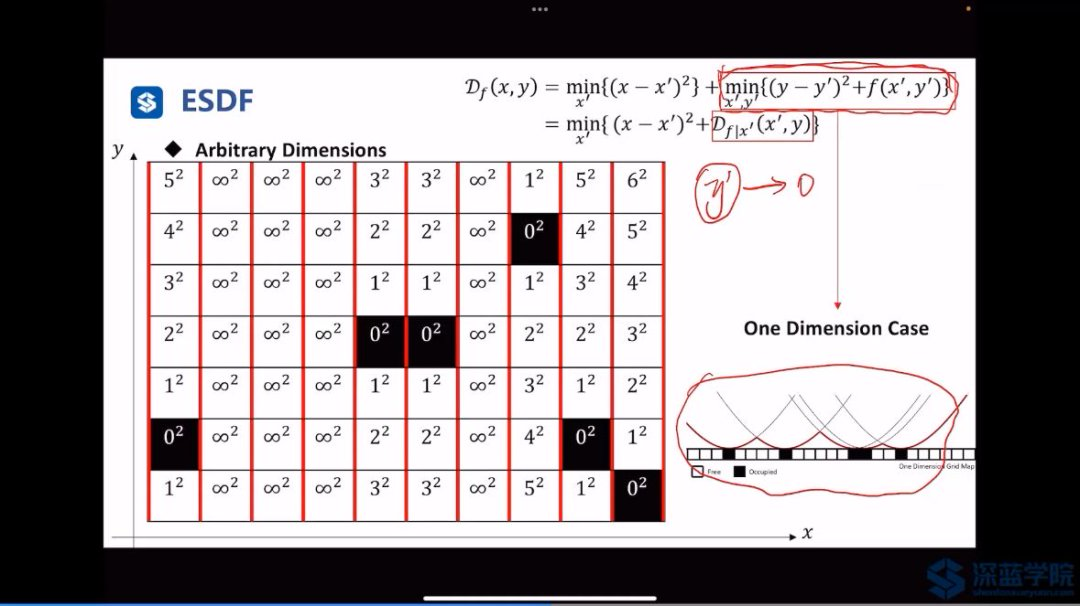
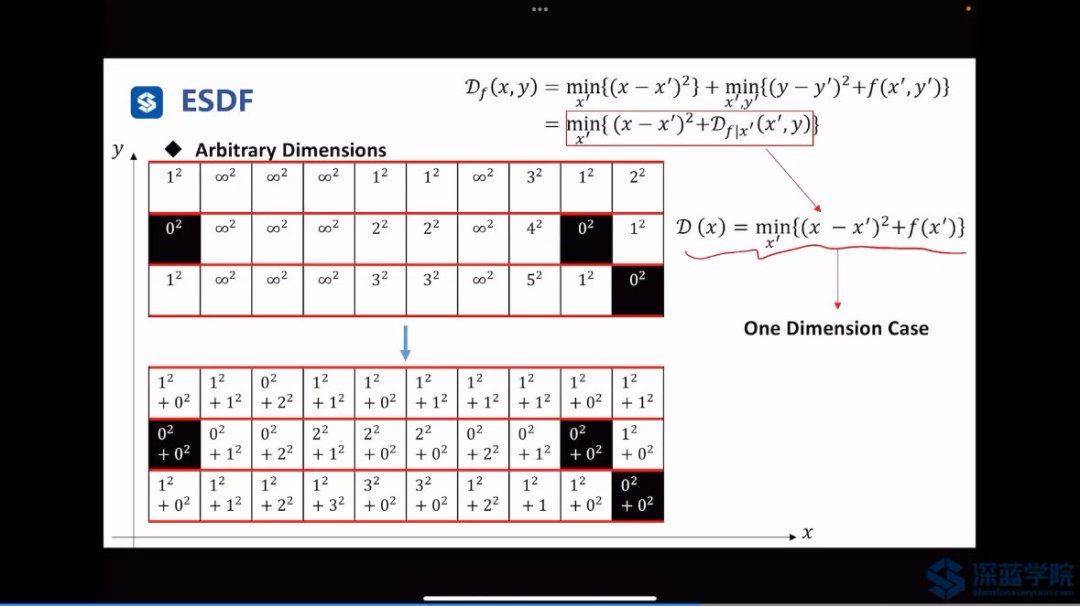
【注意】:每个方向可以分开,在三个方向上各算一次。
符号:
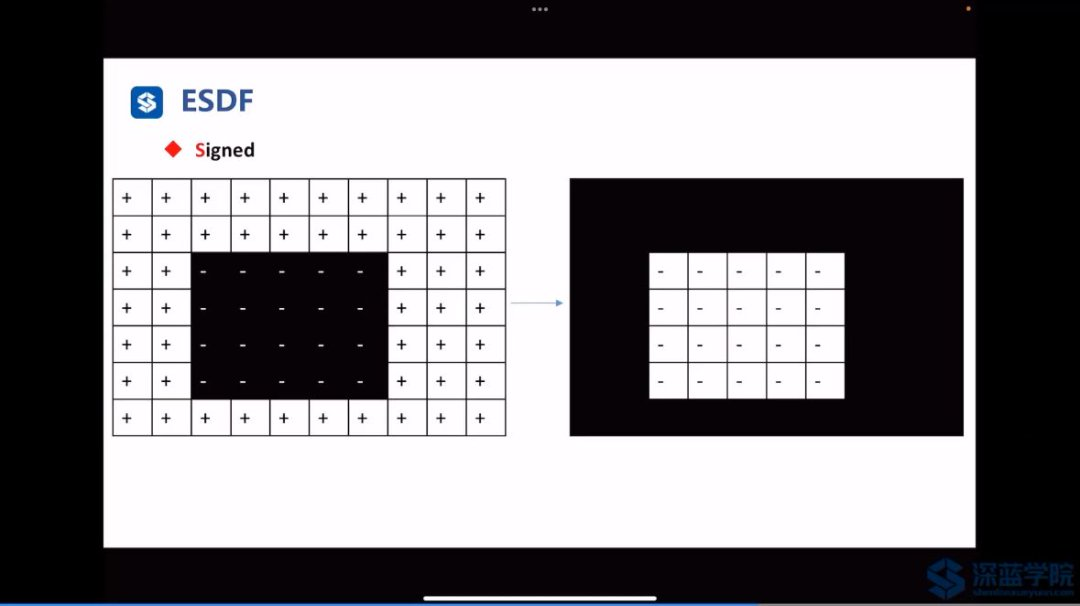
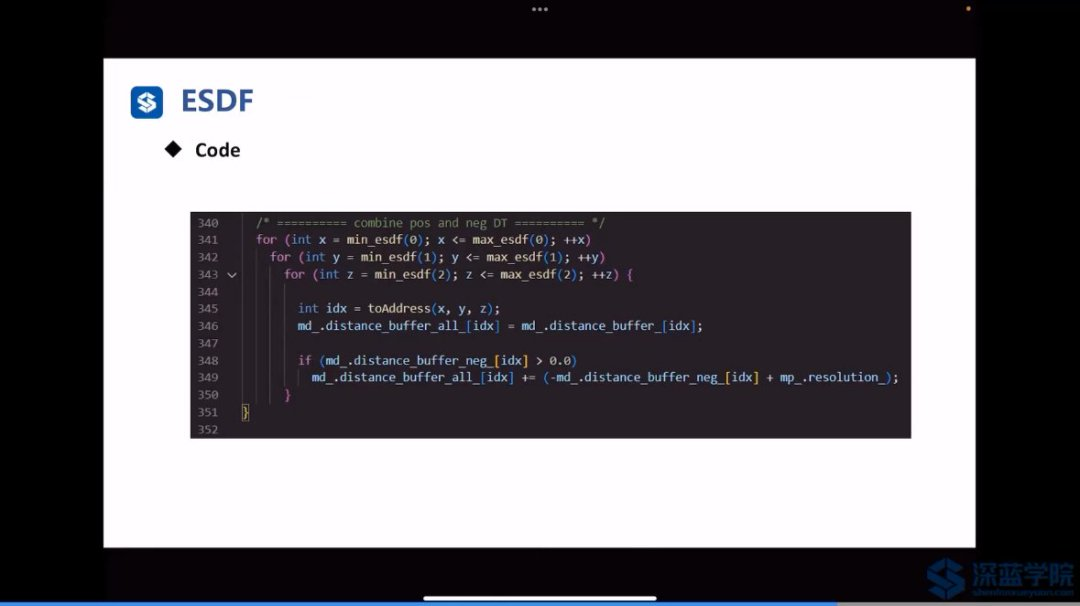
正向与反向的ESDF进行叠加:
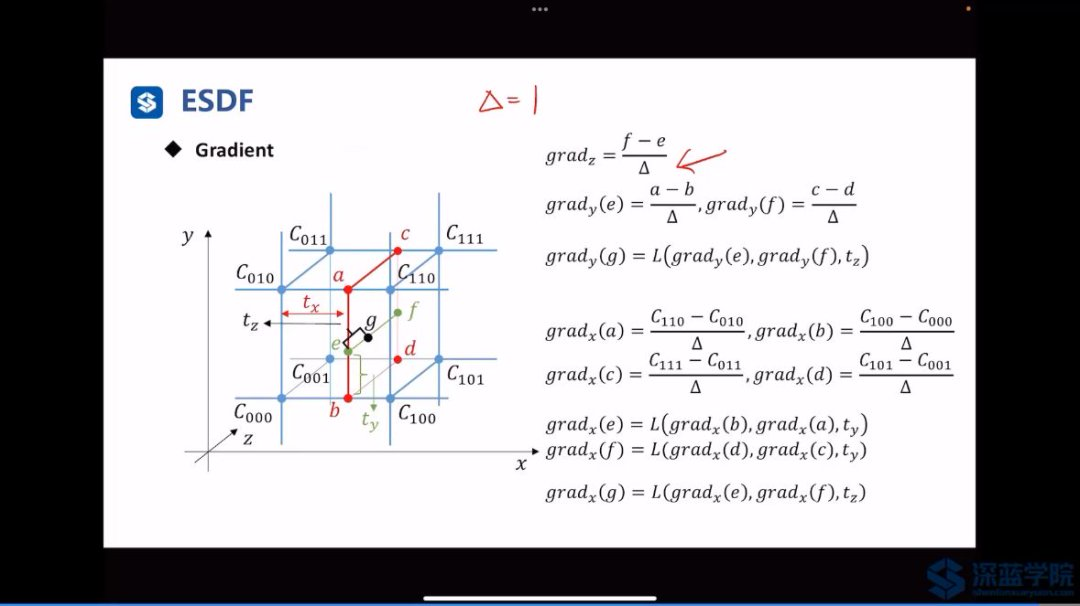
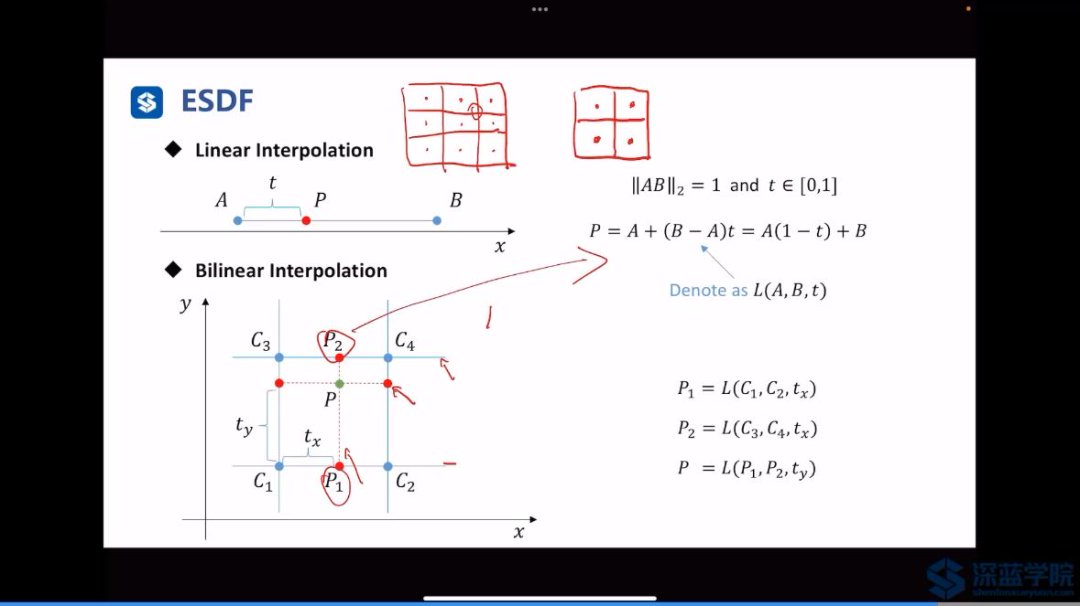
在栅格之间的点,用插值的办法进行解决:
三维的情况:
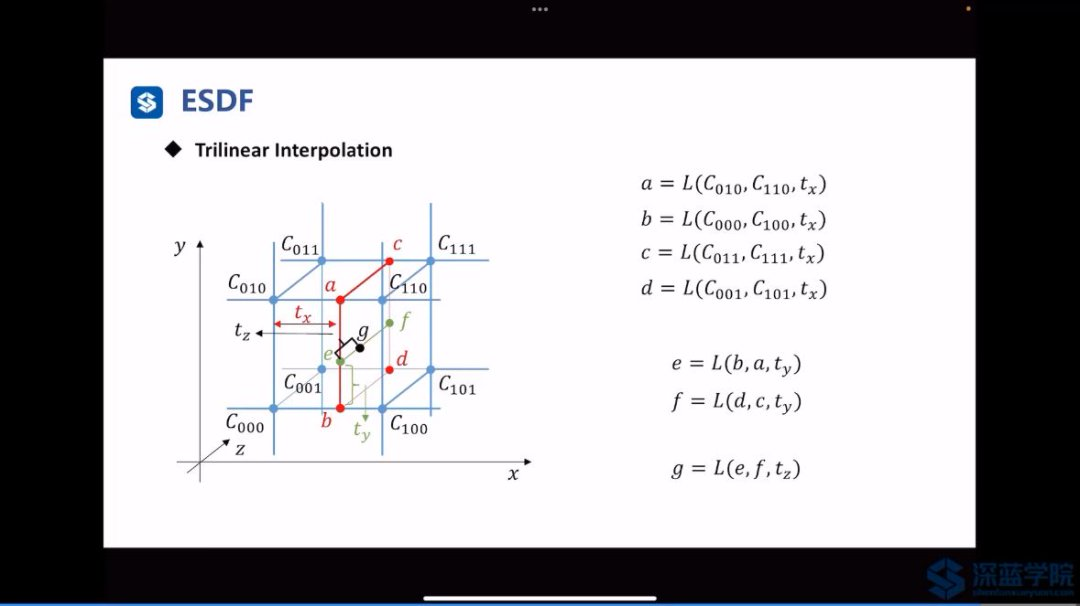
三个方向上的梯度: