参考XTDrone文档:
相关ROS依赖库:
本地基于的是20.04的ubuntu系统:
bash
sudo apt install -y ros-noetic-move-base \
ros-noetic-costmap-2d \
ros-noetic-dwa-local-planner \
ros-noetic-global-planner把HectoSLAM的launch文件中自带的RVIZ启动注释掉:
bash
roscd hector_slam_launch/launch/
sudo gedit hector_slam_xtdrone.launch官网上只需要注释掉rviz显示部分,但是后面尝试只注释掉rviz发现,运行hector_slam_xtdrone.launch会报坐标系TF转化的错,所以添加TF树转换:
报错展示:
INFO] 1755748763.633934538: HectorSM p_laser_z_min_value_: -1.000000 INFO 1755748763.633955212: HectorSM p_laser_z_max_value_: 1.000000 INFO 1755748764.311158091, 595.524000000: lookupTransform base_stabilized to iris_0/laser_2d timed out. Could not transform laser scan into base_frame.
hector_slam_xtdrone.launch文件修改如下:
bash
<?xml version="1.0"?>
<launch>
<param name="/use_sim_time" value="true"/>
<!-- <node pkg="rviz" type="rviz" name="rviz"
args="-d $(find hector_slam_launch)/rviz_cfg/mapping_xtdrone.rviz"/> -->
<node pkg="tf" type="static_transform_publisher" name="laser_to_base"
args="0 0 0.1 0 0 0 base_stabilized iris_0/laser_2d 100" />
<include file="$(find hector_mapping)/launch/hector_mapping_xtdrone.launch"/>
<include file="$(find hector_imu_attitude_to_tf)/launch/hector_imu_xtdrone.launch"/>
</launch>采用之前HectorSLAM建好的图进行规划:
相关细节见:二维激光SLAM(HectorSLAM) · 语雀
修改HectorSLAM的配置文件,使新发布的地图不会取代已经建好的地图:
bash
roscd hector_mapping/launch/
sudo gedit hector_mapping_xtdrone.launch把发布地图服务改为false 并取消注释56行的话题名映射,将map映射为map_new,从而不被订阅使用:
修改launch文件如下:
bash
<?xml version="1.0"?>
<launch>
<arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher_frame"/>
<arg name="base_frame" default="base_stabilized"/>
<arg name="odom_frame" default="base_stabilized"/>
<arg name="pub_map_odom_transform" default="true"/>
<arg name="scan_subscriber_queue_size" default="5"/>
<arg name="scan_topic" default="/iris_0/scan"/>
<arg name="map_size" default="512"/>
<node pkg="tf" type="static_transform_publisher" name="odom_to_map_broadcaster" args="0 0 0 0 0 0 map odom 100" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="$(arg map_size)"/>
<param name="map_start_x" value="0.2"/>
<param name="map_start_y" value="0.2" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.06" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<!-- Advertising config -->
<param name="advertise_map_service" value="false"/>
<param name="scan_subscriber_queue_size" value="$(arg scan_subscriber_queue_size)"/>
<param name="scan_topic" value="$(arg scan_topic)"/>
<!-- Debug parameters -->
<!--
<param name="output_timing" value="false"/>
<param name="pub_drawings" value="true"/>
<param name="pub_debug_output" value="true"/>
-->
<param name="tf_map_scanmatch_transform_frame_name" value="$(arg tf_map_scanmatch_transform_frame_name)" />
<remap from="/slam_out_pose" to="/iris_0/pose"/>
<remap from="/map" to="/map_new"/>
</node>
</launch>
启动PX4仿真:
bash
cd ~/PX4_Firmware
roslaunch px4 indoor3.launch启动二维激光SLAM:
bash
roslaunch hector_slam_launch hector_slam_xtdrone.launch建立和PX4仿真的通信,同时发布位置真值:
bash
cd ~/XTDrone/communication
python multirotor_communication.py iris 0将激光水平定位和高度真值数据通过MAVROS发给PX4:
bash
cd ~/XTDrone/sensing/slam/laser_slam/script
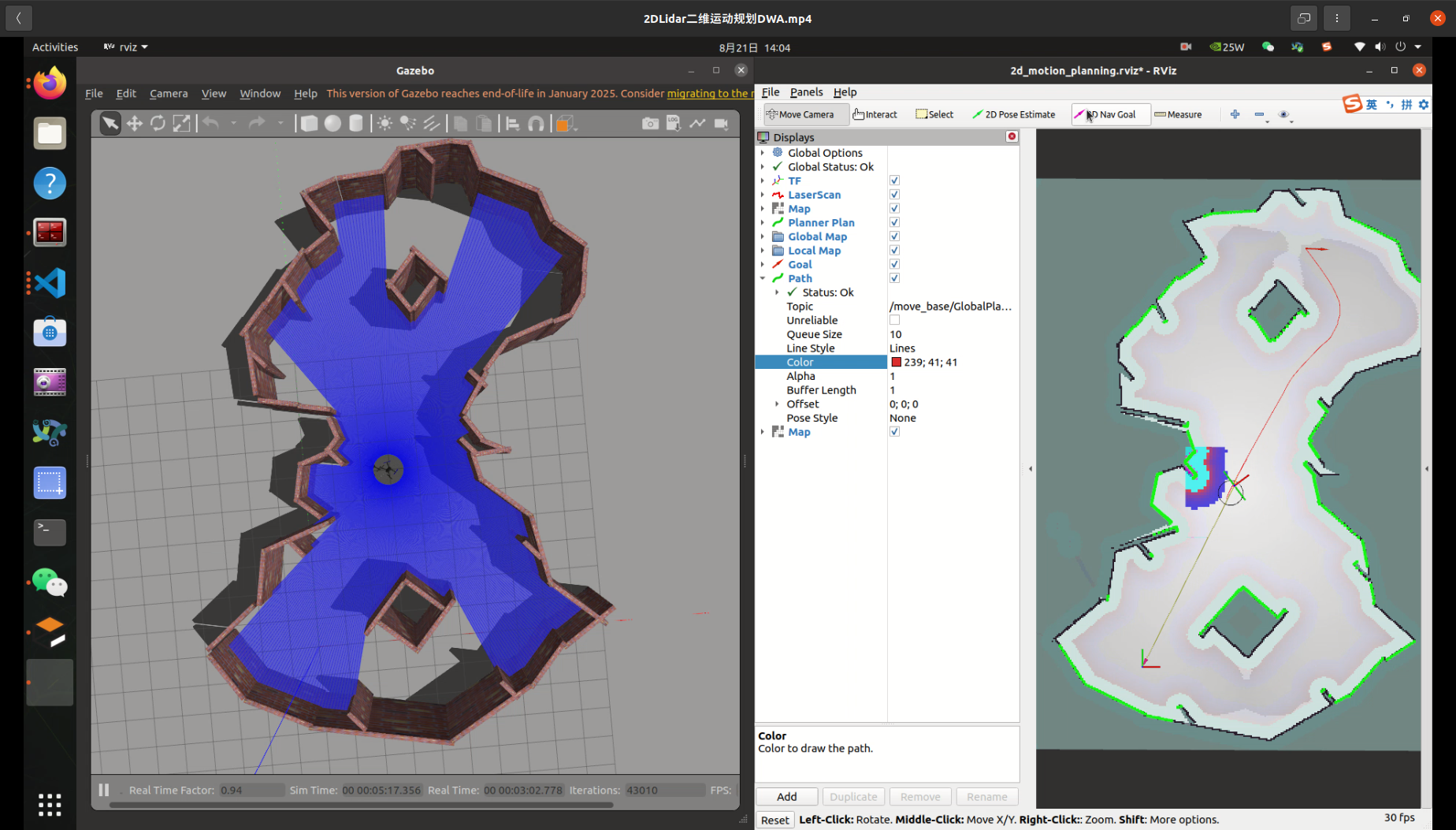
python laser_transfer.py iris 0 hector启动运动规划:
【注意】: 2d_motion_planning.launch、move_base.launch和indoor3.yaml中的路径变量,要改成自己电脑对应的路径名。
bash
cd ~/XTDrone/motion_planning/2d/launch
roslaunch 2d_motion_planning.launch然后控制无人机起飞,并悬停在一定的高度:
bash
cd ~/XTDrone/control/keyboard
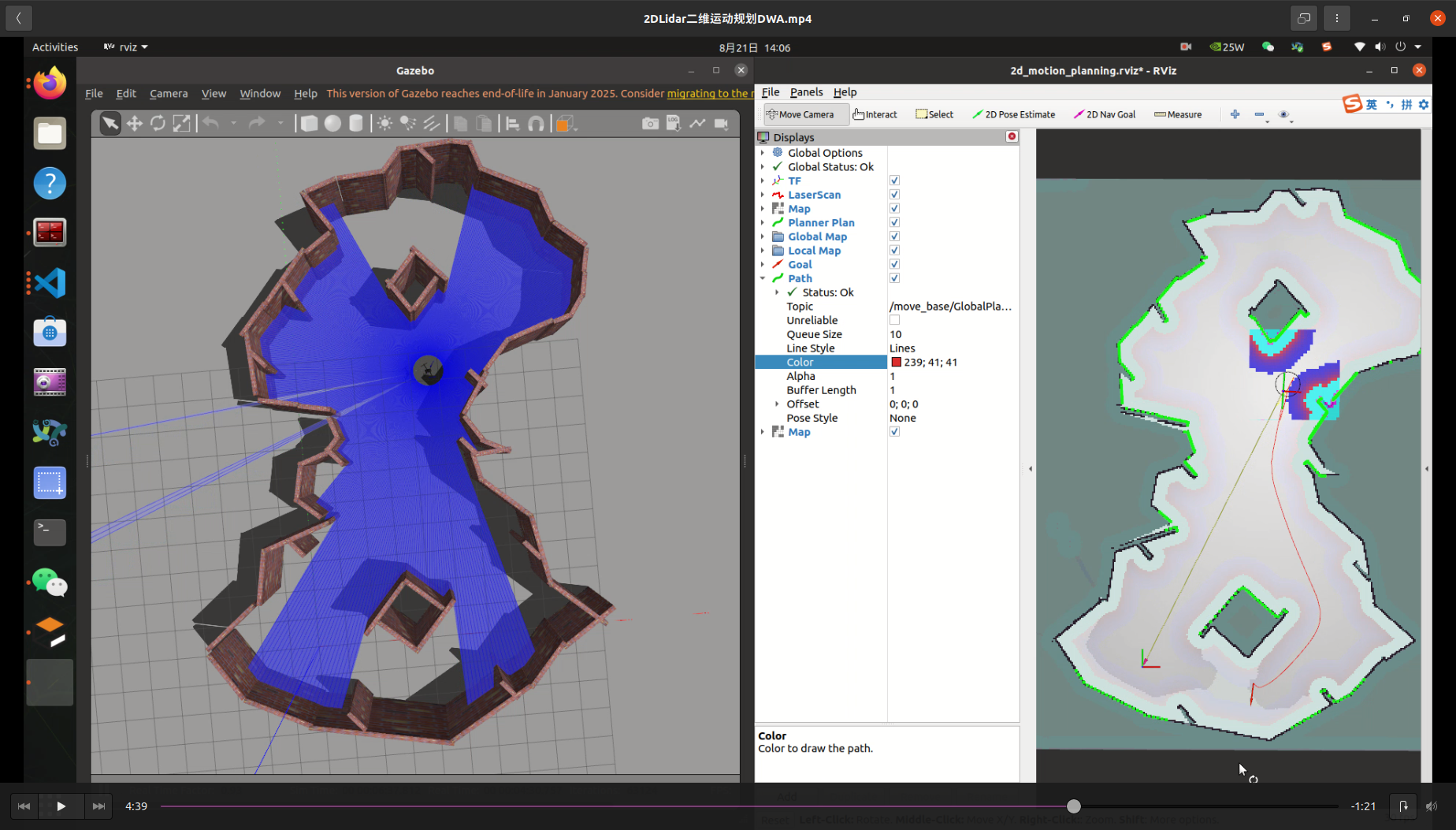
python multirotor_keyboard_control.py iris 1 vel然后关掉控制无人机起飞的键盘控制话题,在2d_motion_planning.launch话题的rviz界面进行2D Nav goal****航点规划,观察无人机运行状况。
路径规划结果如下: