一.概述
Linux 内核中的 V4L2(Video for Linux Two)框架 是用于管理音视频设备(如摄像头、电视调谐器、视频采集卡等)的核心子系统。
它提供了一套统一的接口,使得用户空间应用程序能够方便地访问和控制硬件设备,同时抽象了底层硬件差异,简化了驱动开发流程。
二 .V4L2 的核心功能与应用场景
1. 功能
设备抽象:将摄像头、麦克风等硬件抽象为统一的设备节点(如 /dev/videoX),支持多种数据格式(如 YUV、RGB、RAW 等)。
数据流控制:管理视频 / 音频的捕获(Capture)、输出(Output)、叠加(Overlay)等流程,支持缓冲区队列(Buffer Queue)机制。
参数配置:控制设备参数(如分辨率、帧率、曝光时间、增益等),支持扩展属性(如厂商自定义参数)。
子设备管理:协调多组件设备(如摄像头传感器 + 编解码器),通过 v4l2_subdev 接口管理子设备(如 ISP、MIPI 传感器等)。
2. 应用场景
摄像头应用(如工业视觉、安防监控、嵌入式设备)。
视频会议、直播软件(如 FFmpeg、GStreamer 基于 V4L2 开发)。
电视广播接收、视频编码 / 解码系统。
三 .V4L2 框架的层次结构
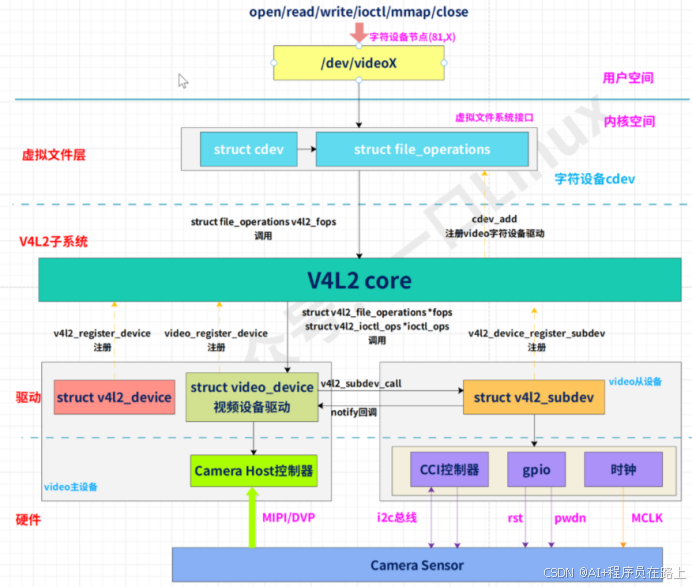
V4L2 分为 用户空间接口 和 内核空间驱动 两部分,通过标准化接口实现交互。
1. 用户空间接口
设备节点:/dev/videoX(视频设备)、/dev/v4l-subdevX(子设备)。
核心 API:
IOCTL 接口:通过 ioctl() 系统调用操作设备,如 VIDIOC_QUERYCAP(查询设备能力)、VIDIOC_STREAMON(启动数据流)等。
缓冲区管理:使用 mmap() 映射内核缓冲区到用户空间,避免数据拷贝(零拷贝机制)。
示例工具:v4l2-ctl(命令行工具,用于配置设备参数)、v4l2-dump(抓取视频数据)。
2. 内核空间驱动
子系统架构:
v4l2_device:代表一个物理设备(如摄像头),包含多个子设备(v4l2_subdev)和功能单元(如传感器、编解码器)。
v4l2_driver:驱动注册接口,定义设备支持的操作(如打开、关闭、IOCTL 处理)。
v4l2_pad:数据流的输入 / 输出端点,用于连接不同子设备(如传感器输出 pad 连接到编解码器输入 pad)。
v4l2_format:描述数据格式(如分辨率、像素格式、帧率等),支持动态协商(VIDIOC_S_FMT/VIDIOC_G_FMT)。
关键数据结构:
struct v4l2_device {
struct device dev; // 内核设备模型
struct v4l2_driver *driver;// 所属驱动
const char *name; // 设备名称
};
struct v4l2_subdev {
struct v4l2_device *v4l2_dev; // 所属主设备
const struct v4l2_subdev_ops *ops; // 子设备操作函数(如传感器控制)
};
struct v4l2_buffer {
enum v4l2_buf_type type; // 缓冲区类型(视频捕获、输出等)
unsigned int index; // 缓冲区索引
size_t length; // 数据长度
void *mmap_addr; // 内存映射地址
};
四 .V4L2 数据流处理流程
以 视频捕获流程 为例,说明数据在 V4L2 中的流转:
1. 设备初始化:
用户空间调用 open(/dev/videoX) 打开设备。
内核通过 v4l2_driver.probe 初始化硬件(如摄像头传感器上电、配置寄存器)。
2. 参数配置:
通过 VIDIOC_S_FMT 设置视频格式(如 1080p、YUYV 格式)。
通过 VIDIOC_REQBUFS 请求分配内核缓冲区(通常为环形缓冲区,提高效率)。
3. 缓冲区映射与入队:
用户空间通过 mmap() 将内核缓冲区映射到用户地址空间。
调用 VIDIOC_QBUF 将缓冲区入队,等待硬件填充数据。
4. 数据流启动:
调用 VIDIOC_STREAMON 启动捕获,硬件开始将图像数据写入入队的缓冲区。
5. 数据获取与处理:
硬件填充完缓冲区后,通过中断通知内核,内核将缓冲区标记为 "满"。
用户空间调用 VIDIOC_DQBUF 出队缓冲区,处理数据(如解码、显示)。
处理完成后,调用 VIDIOC_QBUF 将缓冲区重新入队,循环使用。
6. 数据流停止与释放:
调用 VIDIOC_STREAMOFF 停止数据流。
释放缓冲区和设备资源。
五 .V4L2 子设备(Subdev)与多组件协作
现代摄像头通常包含多个组件(如传感器、ISP、编解码器),V4L2 通过 子设备机制 管理这些组件:
1. 子设备注册:每个组件(如 MIPI 传感器)作为 v4l2_subdev 注册到内核,实现 v4l2_subdev_ops 接口(如 core_ops、video_ops)。
2. 拓扑连接:通过 v4l2_pad 定义数据流路径,例如:
传感器(子设备 A)输出 pad → ISP(子设备 B)输入 pad → 主设备视频输出 pad
3. ****协同控制:****主设备驱动通过 v4l2_subdev_call 调用子设备操作(如设置传感器曝光时间),实现跨组件参数同步。
六 .V4L2 的优势与扩展
1. 优势:
标准化接口:统一用户空间操作方式,适配不同硬件(如 USB 摄像头、MIPI 摄像头)。
高效性能:支持 DMA 传输和零拷贝缓冲区,降低 CPU 开销。
模块化设计:驱动层可拆分为主设备驱动和子设备驱动,便于维护和扩展。
2. 扩展功能:
媒体控制器(Media Controller):基于 V4L2 的扩展框架,用于管理复杂设备拓扑(如多传感器、多链路),通过 media-ctl 工具配置数据流路径。
异步通知:通过 poll() 或 epoll() 监听设备事件(如缓冲区就绪)。
硬件加速:集成 VA-API、VDPAU 等硬件编解码加速接口。
七 .典型开发流程(以摄像头驱动为例)
1. 注册主设备:
创建 v4l2_device,关联内核设备模型。
注册 v4l2_driver,实现核心操作(如 open、release、ioctl)。
2. 注册子设备:
为传感器、ISP 等组件创建 v4l2_subdev,实现控制接口(如 set_fmt、get_ctrl)。
通过 v4l2_device 关联子设备,建立拓扑关系。
3. 实现缓冲区操作:
分配 DMA 缓冲区,通过 v4l2_mem_ops 提供内存管理接口。
实现 queuebuf 和 dmabuf 回调,处理硬件数据填充。
4. 用户空间开发:
使用 libv4l2 库或直接调用 IOCTL 接口,实现视频捕获、格式转换等功能。
结合 GStreamer/FFmpeg 等框架快速开发应用(如 v4l2src 插件)。
八 .总结
V4L2 框架是 Linux 音视频开发的核心基础设施,通过标准化接口和分层设计,简化了硬件驱动开发和用户空间应用开发。无论是嵌入式摄像头、工业视觉设备,还是多媒体服务器,V4L2 都提供了高效、灵活的解决方案。深入理解 V4L2 的架构和数据流机制,是开发高性能音视频系统的关键。