1、概述
该程序是基于OpenHarmony标准系统编写的平台驱动:ADC驱动。
系统版本:openharmony5.0.0
开发板:dayu200
编译环境:ubuntu22
部署路径: //sample/02_platform_adc
2、基础知识
2.1、ADC简介
ADC(Analog to Digital Converter),即模拟-数字转换器,可将模拟信号转换成对应的数字信号,便于存储与计算等操作。除电源线和地线之外,ADC只需要1根线与被测量的设备进行连接。
2.2、ADC平台驱动
在HDF框架中,同类型设备对象较多时(可能同时存在十几个同类型配置器),若采用独立服务模式,则需要配置更多的设备节点,且相关服务会占据更多的内存资源。相反,采用统一服务模式可以使用一个设备服务作为管理器,统一处理所有同类型对象的外部访问(这会在配置文件中有所体现),实现便捷管理和节约资源的目的。ADC模块即采用统一服务模式。如下图所示:
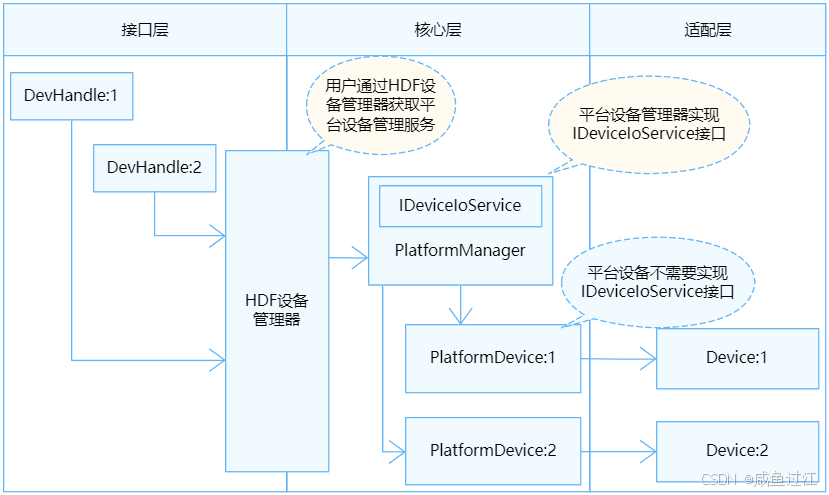
ADC模块各分层的作用为:
- 接口层 :提供打开设备,写入数据,关闭设备的能力。
- 核心层 :主要负责服务绑定、初始化以及释放管理器,并提供添加、删除以及获取控制器的能力。
- 适配层 :由驱动适配者实现与硬件相关的具体功能,如控制器的初始化等。
在统一模式下,所有的控制器都被核心层统一管理,并由核心层统一发布一个服务供接口层,因此这种模式下驱动无需再为每个控制器发布服务。
详细资料请参考官网地址:ADC平台驱动
2.2.1、ADC平台驱动相关函数
为了保证上层在调用ADC接口时能够正确的操作硬件,核心层在//drivers/hdf_core/framework/support/platform/include/adc/adc_core.h中定义了以下钩子函数。驱动适配者需要在适配层实现这些函数的具体功能,并与这些钩子函数挂接,从而完成接口层与核心层的交互。
AdcMethod和AdcLockMethod定义:
c
struct AdcMethod {
int32_t (*read)(struct AdcDevice *device, uint32_t channel, uint32_t *value);
int32_t (*start)(struct AdcDevice *device);
int32_t (*stop)(struct AdcDevice *device);
};
struct AdcLockMethod {
int32_t (*lock)(struct AdcDevice *device);
void (*unlock)(struct AdcDevice *device);
};在适配层中,AdcMethod必须被实现,AdcLockMethod可根据实际情况考虑是否实现。核心层提供了默认的AdcLockMethod,其中使用Spinlock作为保护临界区的锁:
c
static int32_t AdcDeviceLockDefault(struct AdcDevice *device)
{
if (device == NULL) {
return HDF_ERR_INVALID_OBJECT;
}
return OsalSpinLock(&device->spin);
}
static void AdcDeviceUnlockDefault(struct AdcDevice *device)
{
if (device == NULL) {
return;
}
(void)OsalSpinUnlock(&device->spin);
}
static const struct AdcLockMethod g_adcLockOpsDefault = {
.lock = AdcDeviceLockDefault,
.unlock = AdcDeviceUnlockDefault,
};若实际情况不允许使用Spinlock,驱动适配者可以考虑使用其他类型的锁来实现一个自定义的AdcLockMethod。一旦实现了自定义的AdcLockMethod,默认的AdcLockMethod将被覆盖。
(1)AdcMethod结构体成员的钩子函数功能说明
| 函数成员 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| start | device:结构体指针,核心层ADC控制器 | 无 | HDF_STATUS相关状态 | 开启ADC设备 |
| stop | device:结构体指针,核心层ADC控制器 | 无 | HDF_STATUS相关状态 | 关闭HDF_STATUS相关状态 |
| read | device:结构体指针,核心层ADC控制器 channel:uint32_t类型,传入通道号 | value:uint32_t类型指针,传出的信号数据 | HDF_STATUS相关状态 | 读取ADC采样信号的数据 |
(2)AdcLockMethod结构体成员函数功能说明
| 函数成员 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| lock | device:结构体指针,核心层ADC控制器 | 无 | HDF_STATUS相关状态 | 获取临界区锁 |
| unlock | device:结构体指针,核心层ADC控制器 | 无 | HDF_STATUS相关状态 | 释放临界区锁 |
2.2.2、ADC平台驱动开发步骤
(1)实例化驱动入口
- 实例化HdfDriverEntry结构体成员。
- 调用HDF_INIT将HdfDriverEntry实例化对象注册到HDF框架中。
(2)配置属性文件
- 在device_info.hcs文件中添加deviceNode描述。
- 【可选】添加adc_config.hcs器件属性文件。
(3)实例化核心层接口函数
- 初始化AdcDevice成员。
- 实例化AdcDevice成员AdcMethod。
(4)驱动调试
- 【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的测试用例是否成功等。
2.3、ADC应用程序
ADC模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/adc_if.h。
ADC驱动API接口功能介绍如下所示:
| 接口名 | 接口描述 |
|---|---|
| DevHandle AdcOpen(uint32_t number) | 打开ADC设备 |
| void AdcClose(DevHandle handle) | 关闭ADC设备 |
| int32_t AdcRead(DevHandle handle, uint32_t channel, uint32_t *value) | 读取AD转换结果值 |
使用ADC设备的一般流程如下所示:
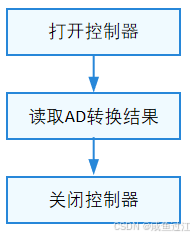
详细资料请参考官网地址:ADC应用程序
3、程序解析
3.1、代码目录。
shell
zcc@ubuntu22:~/oh5.0.0/sample/02_platform_adc$ tree
.
├── app
│ └── adc_test.c
├── BUILD.gn
├── bundle.json
2 directories, 5 files在代码中依赖两个配置文件分别为device_info.hcs和adc_config_linux.hcs。
3.2、配置文件
3.2.1、device_info.hcs
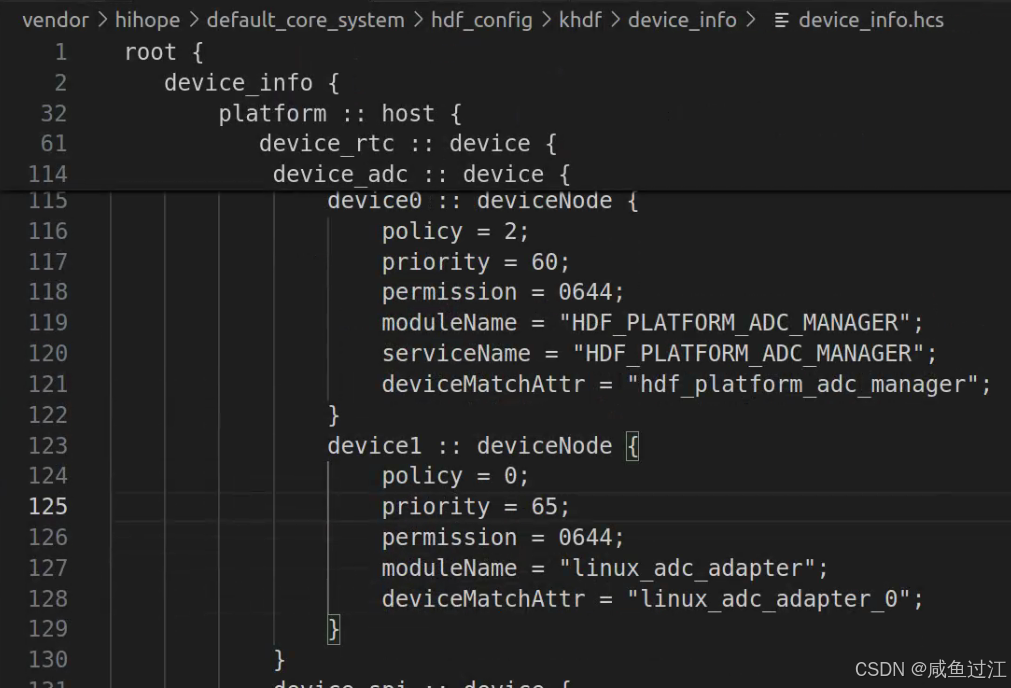
device_info.hcs文件用于驱动设备描述,具体内容如下:
json
....
platform :: host {
device_adc :: device {
device0 :: deviceNode { // ADC控制器信息描述
policy = 2; // 对外发布服务,必须为2,用于定义ADC管理器的服务
priority = 50;
permission = 0644;
moduleName = "HDF_PLATFORM_ADC_MANAGER"; // 这与drivers/hdf_core/framework/support/platform/src/adc/adc_core.c的g_adcManagerEntry.moduleName对应,它主要负责ADC的管理,必须是HDF_PLATFORM_ADC_MANAGER
serviceName = "HDF_PLATFORM_ADC_MANAGER"; // 驱动对外发布服务的名称,ADC管理器服务名设置为HDF_PLATFORM_ADC_MANAGER
deviceMatchAttr = "hdf_platform_adc_manager"; // 驱动私有数据匹配的关键字,ADC管理器没有使用,可忽略
}
device1 :: deviceNode {
policy = 0; // 等于0,不对内核和应用发布服务
priority = 55; // 驱动驱动优先级
permission = 0644; // 驱动创建设备节点权限
moduleName = "linux_adc_adapter"; // 用于指定驱动名称,必须是linux_adc_adapter
deviceMatchAttr = "linux_adc_adapter_0"; // 用于配置控制器私有数据,必须与adc_config.hcs中对应控制器保持一致
}
}
}
.....注意:
-
device0 :ADC控制器,为了引入HDF_PLATFORM_ADC_MANAGER驱动,必须要。
-
device1 :ADC实际操作接口。
-
moduleName:该驱动名称,必须是linux_adc_adapter,//drivers/hdf_core/adapter/khdf/linux/platform/adc/adc_iio_adapter.c已编写好。
-
serviceName:对外发布服务的名称,必须是HDF_PLATFORM_ADC_MANAGER。
-
deviceMatchAttr:关键字必须与config.hcs的match_attr匹配。
3.2.2、adc_config_linux.hcs
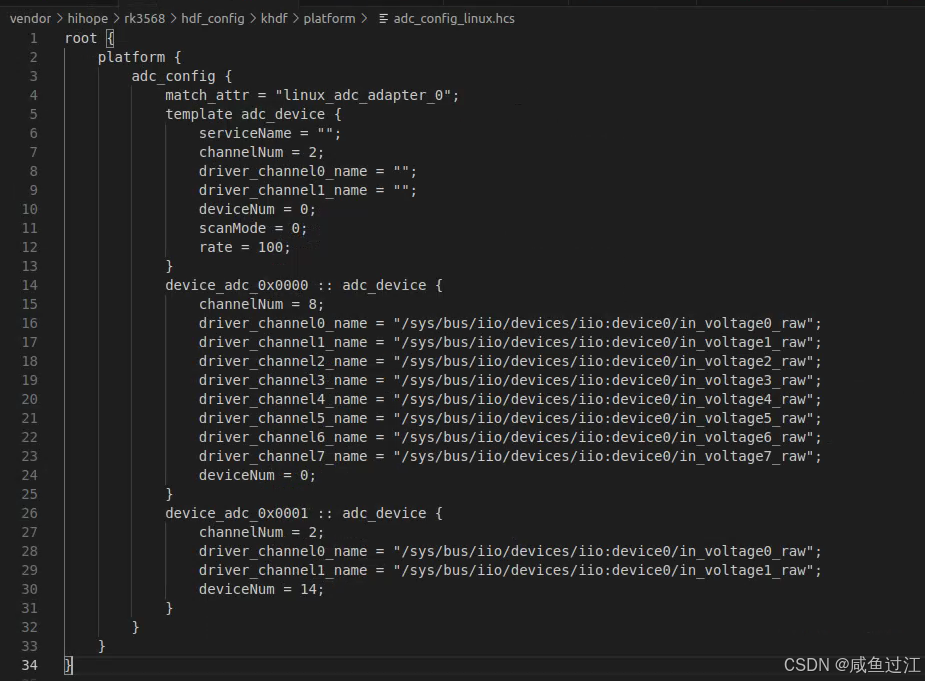
创建adc_config_linux.hcs,用于定义私有变量,具体内容如下:
json
root {
platform {
adc_config {
match_attr = "linux_adc_adapter_0"; // 与device_info.hcs的deviceMatchAttr的值一致
template adc_device { // 必须与//drivers/hdf_core/adapter/khdf/linux/platform/adc/adc_iio_adapter.c的配置树定义保持一致
serviceName = ""; // 服务名称
deviceNum = 0; // 设备号标识
channelNum = 8; // ADC通道数量
driver_channel0_name = ""; // 通道0在linux文件系统路径
driver_channel1_name = ""; // 通道1在linux文件系统路径
driver_channel2_name = ""; // 通道2在linux文件系统路径
driver_channel3_name = ""; // 通道3在linux文件系统路径
driver_channel4_name = ""; // 通道4在linux文件系统路径
driver_channel5_name = ""; // 通道5在linux文件系统路径
driver_channel6_name = ""; // 通道6在linux文件系统路径
driver_channel7_name = ""; // 通道7在linux文件系统路径
scanMode = 0; // 扫描模式
rate = 1000; // 转换速率
}
device_adc_0x0000 :: adc_device {
deviceNum = 0;
channelNum = 8;
driver_channel0_name = "/sys/bus/iio/devices/iio:device0/in_voltage0_raw";
driver_channel1_name = "/sys/bus/iio/devices/iio:device0/in_voltage1_raw";
driver_channel2_name = "/sys/bus/iio/devices/iio:device0/in_voltage2_raw";
driver_channel3_name = "/sys/bus/iio/devices/iio:device0/in_voltage3_raw";
driver_channel4_name = "/sys/bus/iio/devices/iio:device0/in_voltage4_raw";
driver_channel5_name = "/sys/bus/iio/devices/iio:device0/in_voltage5_raw";
driver_channel6_name = "/sys/bus/iio/devices/iio:device0/in_voltage6_raw";
driver_channel7_name = "/sys/bus/iio/devices/iio:device0/in_voltage7_raw";
}
}
}
}ADC实际驱动是//drivers/hdf_core/adapter/khdf/linux/platform/adc/adc_iio_adapter.c,template adc_device定义的各项关键变量是由adc_iio_adapter.c决定,不可修改。
adc_iio_adapter.c实际是对Linux IIO子系统进行操作来控制ADC。
注意:
- channelNum:表示通道数量
- driver_channelX_name:必须是从0开始
3.3、HDF驱动
ADC平台驱动是//drivers/hdf_core/adapter/khdf/linux/platform/adc/adc_iio_adapter.c,用户不必编写HDF驱动。
下面通过分析AdcOpen和AdcRead函数来看后续的执行过程,首先来看下gpio控制器(GpioCntlr)的类图,如下:
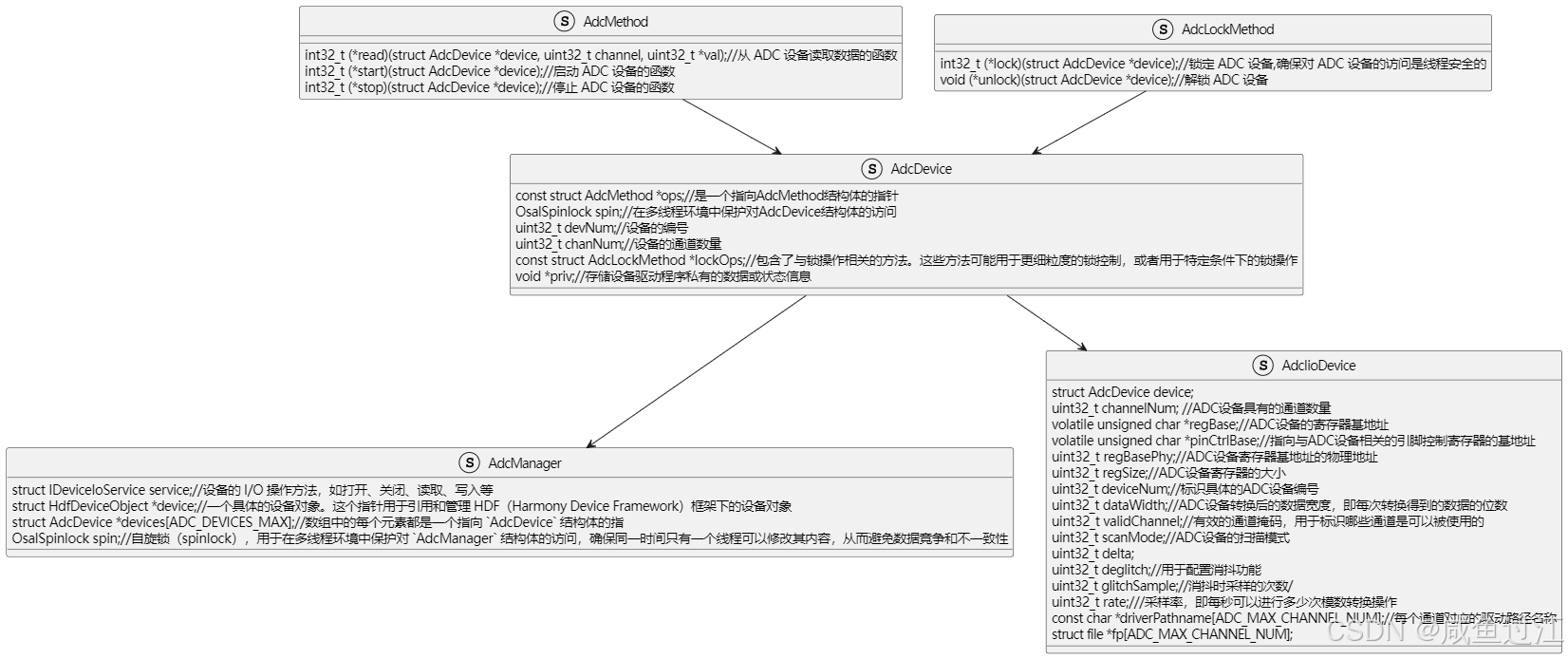
主要操作过程如下:
c
drivers\hdf_core\framework\support\platform\src\adc\adc_if.c
DevHandle AdcOpen(uint32_t number)//打开一个ADC(模数转换器)设备
|-->struct AdcDevice *device = AdcDeviceGet(number);//获取指定编号的ADC设备
|-->return AdcManagerFindDevice(number)
|-->return device = g_adcManager->devices[number];//g_adcManager为AdcManager全局静态变量
|-->ret = AdcDeviceStart(device);//启动该ADC设备
|-->ret = device->ops->start(device);
|-->return (DevHandle)device;//成功获取了设备指针并且启动设备也成功,函数最后会将 `device` 强制转换为 `DevHandle` 类型,并返回这个设备句柄。由以上可知打开adc设备主要过程是从g_adcManager中获取具体设备,并调用设备的启动(start)函数,那么下面的重点便是剖析g_adcManager的赋值过程。
详细过程需要首先了解adc驱动的注册过程,主要是通过适配器(linux_adc_adapter)完成:
c
struct HdfDriverEntry g_adcLinuxDriverEntry = {
.moduleVersion = 1,
.Bind = NULL,
.Init = LinuxAdcInit,
.Release = LinuxAdcRelease,
.moduleName = "linux_adc_adapter",
};
HDF_INIT(g_adcLinuxDriverEntry);在驱动框架hdf初始化时会调用匹配函数
c
static int32_t LinuxAdcInit(struct HdfDeviceObject *device)
|--> DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode)//根据设备树文件遍历
|--> ret = AdcIioParseAndDeviceAdd(device, childNode)//根据遍历的信息添加adc设备
|-->struct AdcIioDevice *adcDevice = (struct AdcIioDevice *)OsalMemCalloc(sizeof(*adcDevice))//分配adc设备内存信息
|-->ret = AdcIioReadDrs(adcDevice, node)//获取adc_config.hcs中的配置信息
|-->adcDevice->device.priv = (void *)node;//将配置信息赋值到私有数据中
|-->adcDevice->device.ops = &g_method;//赋值操作集,包含启、停、读,最终是通过file_open、file_close以及kernel_read函数实现的
|-->ret = AdcDeviceAdd(&adcDevice->device);//添加adc设备
|-->ret = AdcManagerAddDevice(device);//添加adc设备到全局静态变量g_adcManager
|-->struct AdcManager *manager = g_adcManager;
|-->manager->devices[device->devNum] = device//和前面打开adc设备的操作过程匹配上了。操作集中包含的AdcIioStart、AdcIioStop和AdcIioRead,最终是通过file_open、file_close以及kernel_read函数实现的,以AdcIioRead为例可见如下:
c
//drivers\hdf_core\adapter\khdf\linux\platform\adc\adc_iio_adapter.c
static int32_t AdcIioRead(struct AdcDevice *device, uint32_t channel, uint32_t *val)
|-->ret = kernel_read(adcDevice->fp[channel], strValue, ADC_STRING_VALUE_LEN, &pos);//从指定通道的文件指针 `adcDevice->fp[channel]` 读取数据
|-->*val = simple_strtoul(strValue, NULL, 0);//将 `strValue` 数组中的字符串转换为无符号长整型由上分析可大概理解ADC的AdcOpen过程,主要是通过适配器(linux_adc_adapter)根据配置文件(adc_config.hcs)完成驱动的初始化,给全局g_adcManager变量的赋值并设置操作集(adcDevice->device.ops = &g_method),当设置完成后便可支撑接口函数(AdcOpen、AdcClose、AdcRead),当调用接口函数时最终会调到操作集中,并最终由内核函数的file_open、file_close以及kernel_read函数实现。
以3.4、参与Linux内核编译
编辑//kernel/linux/config/linux-5.10/arch/arm64/configs/rk3568_standard_defconfig,启用CONFIG_DRIVERS_HDF_PLATFORM_ADC,具体内容如下:
CONFIG_DRIVERS_HDF_PLATFORM_ADC=y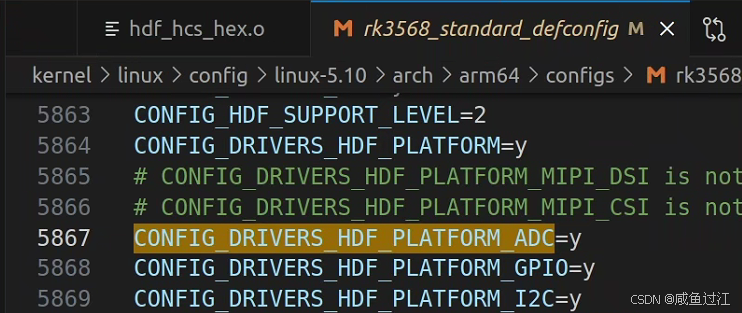
3.5、应用程序
3.5.1、adc_test.c
添加平台驱动ADC的头文件,具体内容如下:
c
#include "adc_if.h" // ADC标准接口头文件程序可通过,具体内容如下:
c
int main(int argc, char* argv[])
{
DevHandle handle = NULL;
int32_t ret;
uint32_t value;
// 解析参数
parse_opt(argc, argv);
printf("adc_device: %d\n", m_adc_device);
printf("adc_channel: %d\n", m_adc_channel);
// 打开ADC设备
handle = AdcOpen(m_adc_device);
if (handle == NULL) {
PRINT_ERROR("AdcOpen failed\n");
return -1;
}
// 进行AD转换并读取转换结果
ret = AdcRead(handle, m_adc_channel, &value);
if (ret != 0) {
PRINT_ERROR("AdcRead failed and ret = %d\n", ret);
AdcClose(handle);
return -1;
}
printf("Adc Device(%d), Channel(%d) read successful and value = %d\n", m_adc_device, m_adc_channel, value);
// 关闭ADC设备
AdcClose(handle);
return 0;
}3.5.2、BUILD.gn
shell
import("//build/ohos.gni")
import("//drivers/hdf_core/adapter/uhdf2/uhdf.gni")
print("samples: compile rk3568_adc_test")
ohos_executable("rk3568_adc_test") {
sources = [ "adc_test.c" ]
include_dirs = [
"$hdf_framework_path/include",
"$hdf_framework_path/include/core",
"$hdf_framework_path/include/osal",
"$hdf_framework_path/include/platform",
"$hdf_framework_path/include/utils",
"$hdf_uhdf_path/osal/include",
"$hdf_uhdf_path/ipc/include",
"//base/hiviewdfx/hilog/interfaces/native/kits/include",
"//third_party/bounds_checking_function/include",
]
deps = [
"$hdf_uhdf_path/platform:libhdf_platform",
"$hdf_uhdf_path/utils:libhdf_utils",
"//base/hiviewdfx/hilog/interfaces/native/innerkits:libhilog",
]
cflags = [
"-Wall",
"-Wextra",
"-Werror",
"-Wno-format",
"-Wno-format-extra-args",
]
subsystem_name = "applications"
part_name = "rk3568_adc_test"
install_enable = true
}4、程序编译

5、运行结果
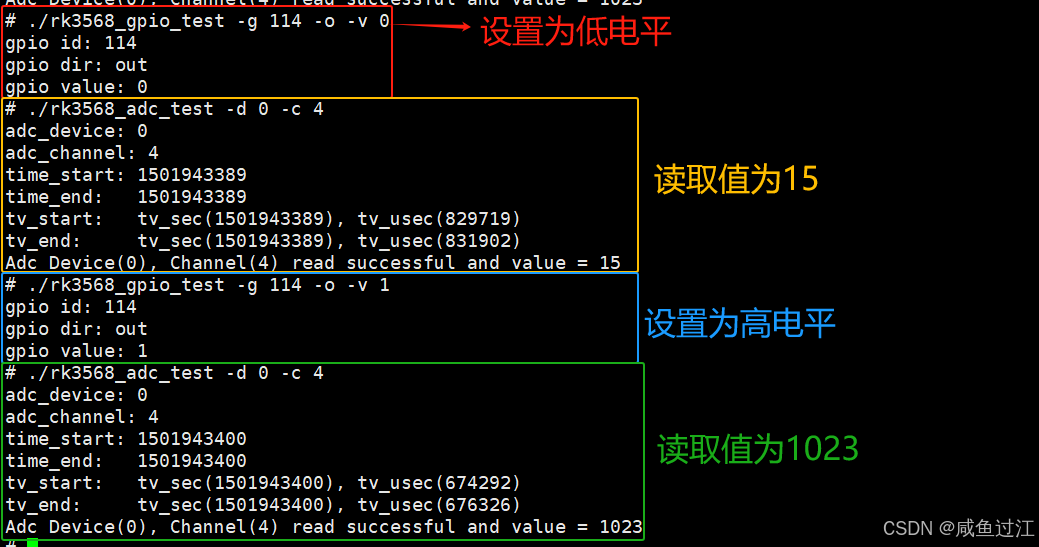
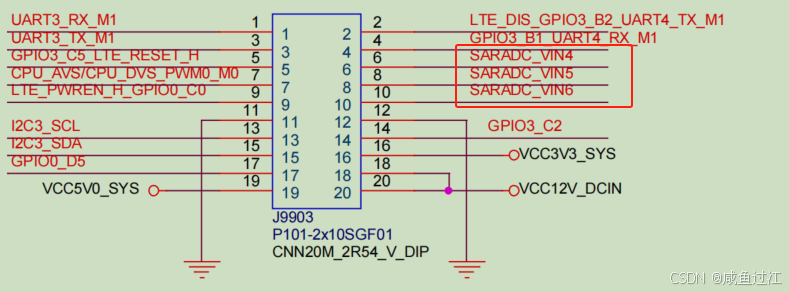
可以将ADC引脚通过引线接入排针线中的GPIO3_C2中,通过设置GPIO3_C2的高低电平可以查看ADC的变化。如下:
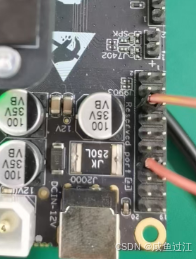
该程序运行结果如下所示: