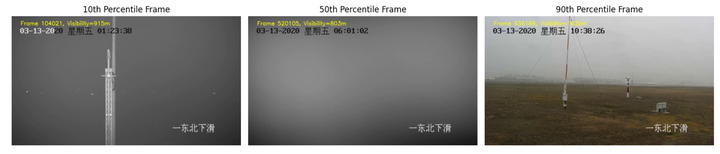
大雾是对机场飞机起降影响极大的因素。在航空领域,习惯用跑道能见度反映机场附近雾和霾的大小,其定义为在跑道的一端沿跑道方向能辨认出跑道或接近跑道的目标物(夜间为跑道边灯)的最大距离。一般情况下,当机场能见度只有400米左右时,会禁止航班起降。当机场能见度只有600-800米左右时航班虽然可以正常起降,但机场会采取临时控制航班流量的措施。
能见度检测最直接的设备是光学能见度仪,但这种设备价格昂贵,使用频率较低、维护成本较高,人们一直在寻找替代方案。能见度是指在大气中能够看到和识别的目标物的最大水平距离,而视频图像是通过摄像机捕捉到的视觉信息。通过分析视频图像中的亮度、对比度和色彩等信息,理论上可以估算出能见度值。近年来,深度学习技术在视频图像处理中的应用越来越广泛。通过训练深度学习模型,可以较准确地从视频图像中提取特征,进而提高能见度检测的精度。但由于视频图像深度学习模型维度非常高,要求对应的样本巨大,但泛化性不高,难以直接推广。因此,建立能见度与大雾背景视频图像之间关系的数学模型是一个具有挑战性的问题。
为了建立大雾背景下视频图像与能见度之间关系的数学模型,请针对题目所提供的数据回答以下问题:
问题一:大雾的存在造成视频图像不再清晰,即"图像模糊",建立反映大雾导致的视频图像模糊程度的数学模型;
在论文的第 1 问中,我们关注的是"图像模糊度"这一量化指标------它直接反映了大雾在视距方向对视频帧清晰度的削弱程度。下面分几个层次来构建这一数学模型:
雾成像物理模型
在大气光学中,雾对图像的影响往往可以用大气衰减---气溶胶散射模型来描述。设原始场景亮度分布为 J(x),在有大雾条件下,摄像机在像素位置x 处接收到的观测亮度I(x) 满足

添加图片注释,不超过 140 字(可选)
t(x)为透射率(transmission),反映路径上的光被雾粒子散射和吸收的比例;
A称为空气光(airlight),是大气散射后进入摄像机的背景亮度,一般近似为全局常数。
在均匀雾层假设下,透射率可写为指数衰减形式
添加图片注释,不超过 140 字(可选)
其中
β是大气衰减系数(extinction coefficient),与雾粒子浓度直接相关;
d(x) 是场景中从成像点到摄像机的距离。
1.1 高频内容的衰减
由上述成像模型可见,雾会将原始图像J(x) 乘以一个小于 1 的因子 t(x),并叠加常数背景A。对比度与细节主要来源于高频分量,而指数衰减会使高频分量衰减得更快,表现为图像"模糊"或"轮廓不清"。从频域角度,若将J与I在空间频率u处的振幅谱分别记作 J^(u)、I^(u),则

添加图片注释,不超过 140 字(可选)
其中 F{t(x)}在高频段通常较低,导致高频成分衰减。
模糊度指标的定义
在实际工程中,我们希望有一个简单、易于计算的数值来刻画每一帧If(x,y)的"模糊"程度。常用且效果良好的一种做法是基于拉普拉斯算子的高通滤波特性:
首先将彩色帧 If转化为灰度图Gf(x,y)。
对灰度图应用拉普拉斯算子(Laplacian),得到二阶导数响应图 ∇2Gf(x,y):
添加图片注释,不超过 140 字(可选)
在数字图像上,可用卷积核
0101−41010或1111−81111来近似计算。
对拉普拉斯响应图取方差Var(∇2Gf)。方差值越大,意味着高频(边缘、细节)分量越丰富,图像越清晰;方差值越小,则图像细节丢失严重、更为模糊。
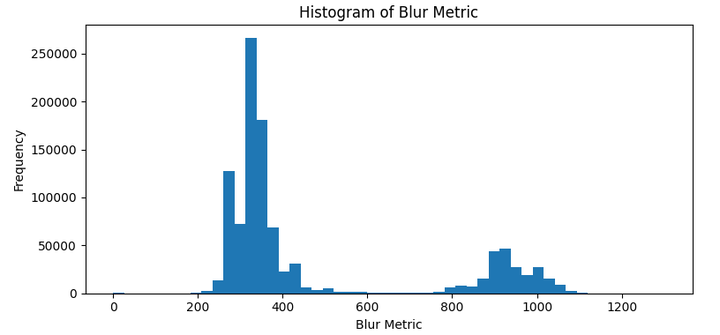
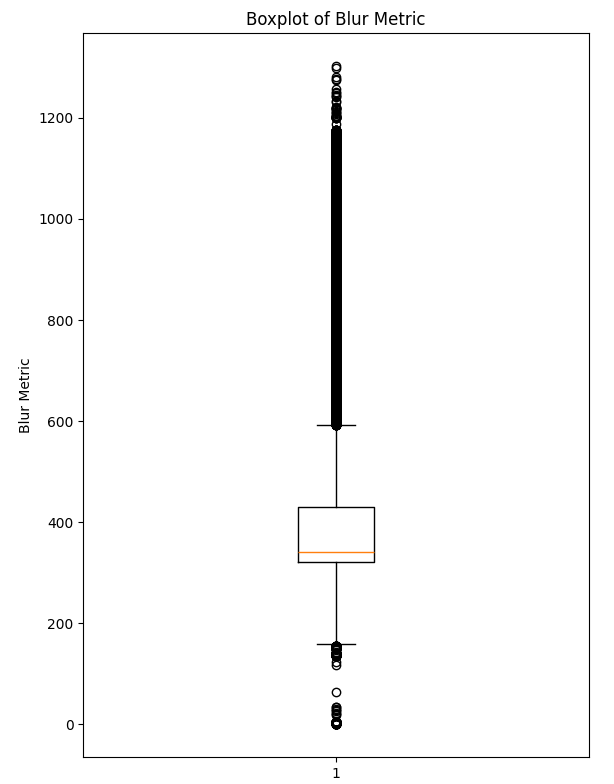
由此我们定义第f帧的模糊度指标(Blur Metric)为

添加图片注释,不超过 140 字(可选)
其中是对整帧像素的平均值。
模型构建:模糊度与雾浓度的关系
3.1 雾浓度的参数化
回到雾成像模型,雾浓度高低由参数 β 控制。理想上,我们希望将拉普拉斯方差 Bf与 β建立函数关系:
但由于场景内容与空气光在不同帧间都可能变化,很难直接求出闭式解。这时我们采取经验建模或半物理半经验的思路:
假设回归模型
添加图片注释,不超过 140 字(可选)
其中 a,c为待估参数,εf为残差。
或者线性化处理
对上式在对数域取对数:

添加图片注释,不超过 140 字(可选)
如果我们能获得一组不同雾浓度(β)下的帧,并测量相应的 Bf,就可以通过最小二乘法估计loga 与−c,从而确定雾浓度与模糊度的定量映射。
3.2 经验阈值划分
在没有直接测量 β的情况下,工程实践中常用 阈值 将不同模糊度 Bf划分为若干等级(如"轻雾"、"中雾"、"重雾"):
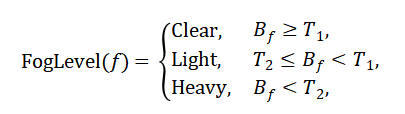
添加图片注释,不超过 140 字(可选)
其中阈值 T1,T2可通过历史统计或行业规范(如能见度 800 m、400 m)来校准。
在视频序列上的连续模型
4.1 时序平滑
由于一段视频中雾浓度会随时间平缓变化,相邻帧的模糊度 Bf不会发生剧烈突变。定义一段时间窗口长度 K帧的移动平均模糊度:
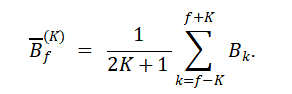
添加图片注释,不超过 140 字(可选)
此平滑能够降低单帧噪声干扰,更好地反映雾浓度的慢时变特性。
4.2 趋势分解
对序列 {Bf}可进一步做 趋势---周期分解(如 H-Trend/Seasonal),得出长期趋势分量 Tf(雾浓度变化趋势)和残差分量 Rf。这在后续的能见度预测和时序建模中非常有用。
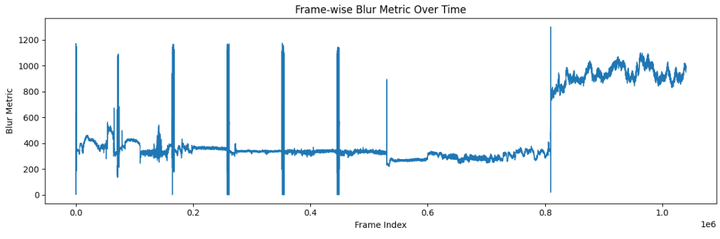
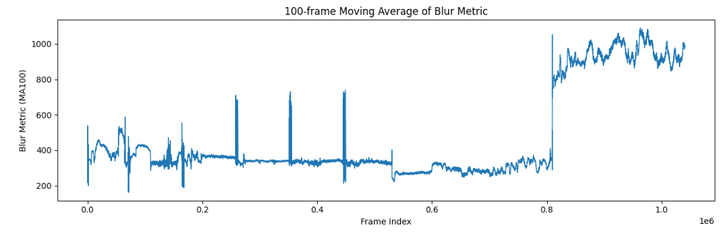
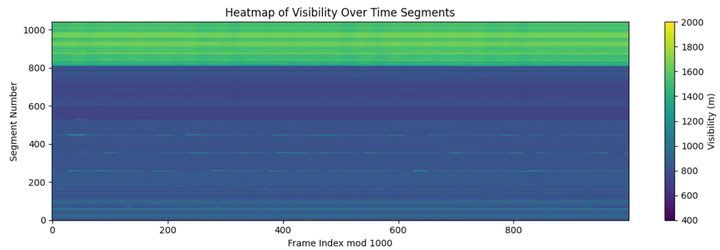
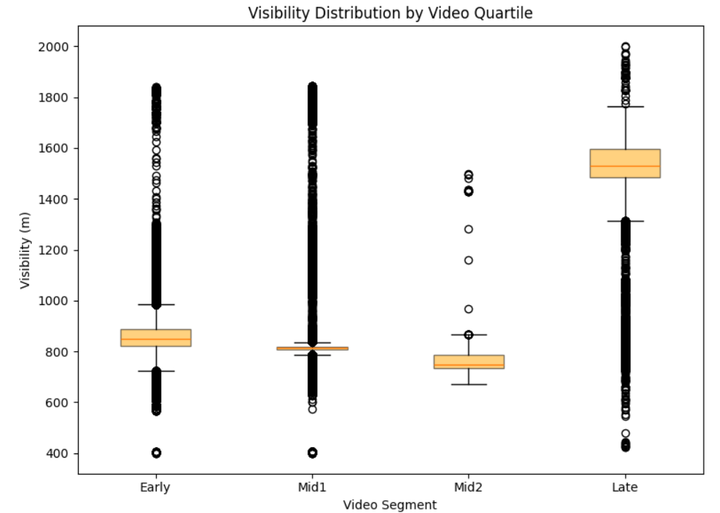
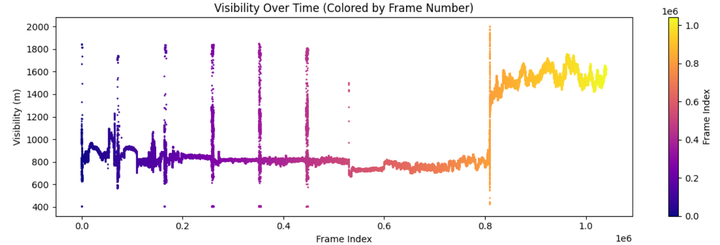
视频帧级模糊度模型求解结果与分析
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
问题二:由于雾是连续变化的,对应的大雾背景视频也是连续变化的。建立能见度随时间连续变化数学模型刻画有雾视频的连续变化;
在大雾条件下,机场跑道附近的能见度(Visibility, VVV)并非瞬时"跳变"式地在两个水平之间切换,而是随着气溶胶浓度、风速、温湿度等大气要素的动态演变呈现平滑、缓慢的时间连续变化特征。为了刻画这一过程,我们需要从视频帧序列和对应气象观测数据出发,构建一个能见度随时间 ttt 连续变化的数学模型。模型既要能够对单点时刻给出估计值,也能反映能见度的时序趋势、局部波动与未来演化预测。下面我们依次展开。
时间变量与离散--连续映射
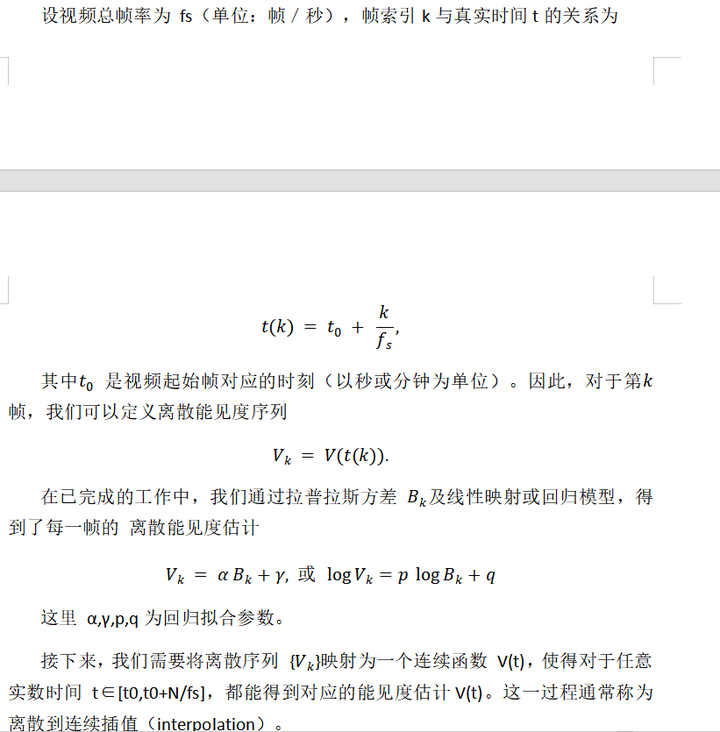
设视频总帧率为 fs(单位:帧/秒),帧索引k与真实时间t的关系为
其中 是视频起始帧对应的时刻(以秒或分钟为单位)。因此,对于第帧,我们可以定义离散能见度序列
在已完成的工作中,我们通过拉普拉斯方差 及线性映射或回归模型,得到了每一帧的 离散能见度估计
添加图片注释,不超过 140 字(可选)
这里 α,γ,p,q为回归拟合参数。
接下来,我们需要将离散序列 {}映射为一个连续函数 V(t),使得对于任意实数时间 t∈t0,t0+N/fs,都能得到对应的能见度估计V(t)。这一过程通常称为离散到连续插值(interpolation)。
插值与平滑:构建初始连续曲线
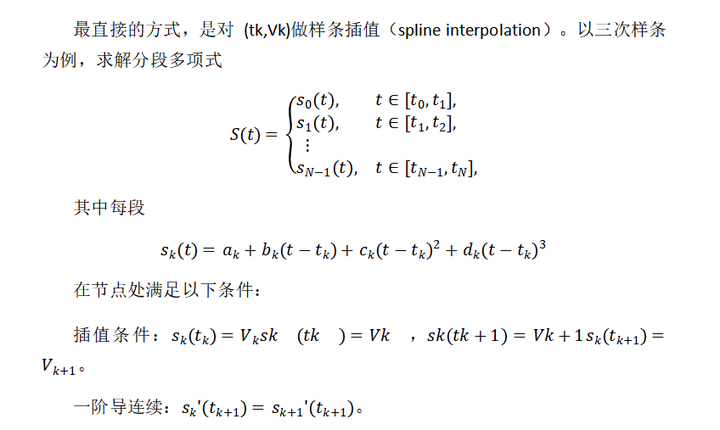
2.1 样条插值
最直接的方式,是对 (tk,Vk)做样条插值(spline interpolation)。以三次样条为例,求解分段多项式
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
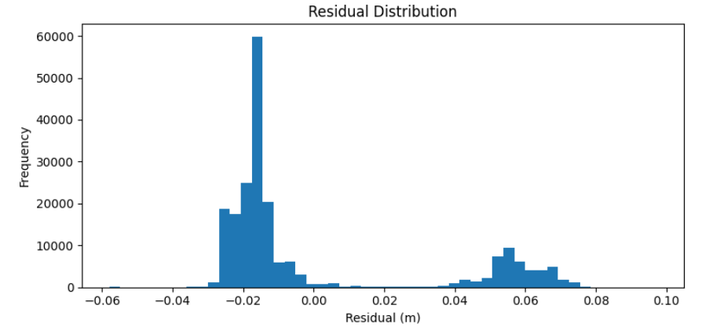
问题三:建立能见度与有雾视频图像之间回归关系模型,并对回归的精度进行估计。另外,雾的大小与近地面的气象要素(温度、湿度、风速等)有关,为了提高能见度估计的精度,请在回归分析时添加适当的气象要素。
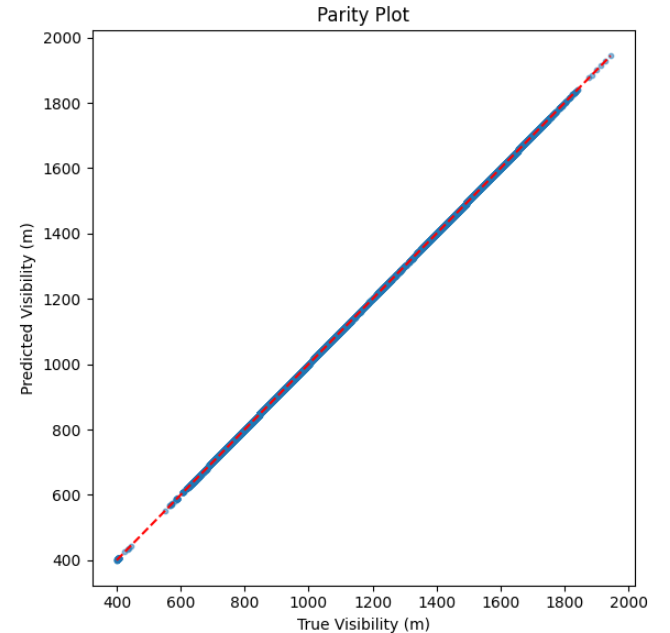
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)