我最近在从事一项很有意思的项目,我想在PFGA上部署CNN并实现手写图片的识别。而本篇文章,是我迈出的第一步。具体代码已发布在github上
模块介绍
卷积神经网络(CNN)可以分为卷积层、池化层、激活层、全链接层结构,本篇要实现的,就是CNN的卷积层中的window窗。
在卷积过程中,最复杂的就是卷积运算,也就是Filter和图片(输入)相乘然后在相加的这一步骤。

我此处的构想就是将其卷积这个步骤进行拆分:加窗、载入权重、卷积运算。因而对应3个模块,而此处实现的就是加窗这个模块。而他主要负责的功能就是:提取输入图片中的数据,生成对应的窗口。 如上图所示,对x:,:,0图片进行窗口提起,提取的第一个窗口(左上角第一个)就是
0 0 0 0 0 1 0 0 1 \begin{bmatrix}0&0&0\\0&0&1\\0&0&1\end{bmatrix} 000000011
代码
- 可配置参数、输入和输出定义
STRIDE为窗口滑动的步长,KERNEL_SIZE对应输入卷积核的大小,PADDING 为补充的长度
pixel_in 为输出的图片数据,frame_start 为图片开始输入的标志,pixel_valid为输入有效标志
window_out是图片展成一维的窗口数据
verilog
module window #(
parameter DATA_WIDTH = 16, // Width of each pixel data
parameter IMG_WIDTH = 32, // Width of input image
parameter IMG_HEIGHT = 32, // Height of input image
parameter KERNEL_SIZE = 3, // Size of convolution window (square)
parameter STRIDE = 1, // Stride of convolution
parameter PADDING = (KERNEL_SIZE - 1) / 2 // Padding size calculated for SAME mode
)
(
input wire clk, // Clock signal
input wire rst_n, // Active low reset
input wire [DATA_WIDTH-1:0] pixel_in, // Input pixel data
input wire pixel_valid, // Input pixel valid signal
input wire frame_start, // Start of new frame signal
output reg [KERNEL_SIZE*KERNEL_SIZE*DATA_WIDTH-1:0] window_out, // Flattened window output
output reg window_valid // Window data valid
);- 内部信号定义
-
输入的图片数据是一个一个输入的,用x_pos和y_pos 来记录当前pixel位于图片中的位置
-
窗口在图片上滑动,用x_window,y_window用来判断窗口目前的位置
-
line_Buffer缓存输入的数据,同时进行padding操作, 形成数据窗口,而window_buffer 在line_buffer上进行滑动,形成窗口
-
状态机,分为三个状态 IDLE, LOAD,PROCESS, 分别对应空闲,载入(开始载入数据),处理(形成window)
verilog
// Internal signals
reg [5:0] x_pos, y_pos; // Current input pixel position
reg [5:0] x_window, y_window; // Window center position
reg [DATA_WIDTH-1:0] line_buffer [0:KERNEL_SIZE][0:IMG_WIDTH+2*PADDING-1]; // Line buffer
reg [DATA_WIDTH-1:0] window_buffer [0:KERNEL_SIZE-1][0:KERNEL_SIZE-1]; // Window buffer
reg signed [6:0] src_y, src_x; // Temporary variables for coordinate calculation
// State machine
reg [1:0] current_state, next_state;
localparam IDLE = 2'b00, LOAD = 2'b01, PROCESS = 2'b10;
// Loop variables
integer i, j, k;- 状态的赋值以及跳转
-
当接收到frame_start信号(图片开始输入),状态从空闲进入到LOAD状态;
-
当目前的图片数据可以已经足够,可以用来生成稳定的输出窗口时,进入到PROCESS状态
-
当目前滑窗口提取完对应数据窗口后,回到IDLE状态
注:y_pos从0到KERNEL_SIZE-1时,已经有了KERNEL_SIZE行数据了,可以进入窗口数据提取阶段;实际上可以更早进入,因为存在Padding。当y_pos=KERNEL_SIZE-Padding-1的时候,就可以进入了
verilog
// FSM state transitions
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
current_state <= IDLE;
else
current_state <= next_state;
end
always @(*) begin
case (current_state)
IDLE: next_state = frame_start ? LOAD : IDLE;
LOAD: next_state = (y_pos >= KERNEL_SIZE-1) ? PROCESS : LOAD;
PROCESS: next_state = (y_window >= IMG_HEIGHT && x_window == 0) ? IDLE : PROCESS;
default: next_state = IDLE;
endcase
end- 状态执行
推荐使用拆分的方法,把一个状态执行的大always块,分成很多子always块。
a. 输入图片数据位置捕获
-
当前状态为IDLE,图片即将开始输入时,将定位信号复原
-
当前状态不为IDLE, 同时输入有效,那么坐标根据情况自增
verilog
// Input pixel position tracking
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
x_pos <= 0;
y_pos <= 0;
end else if (current_state == IDLE && frame_start) begin
x_pos <= 0;
y_pos <= 0;
end else if (pixel_valid && current_state != IDLE) begin
if (x_pos == IMG_WIDTH-1) begin
x_pos <= 0;
y_pos <= y_pos + 1;
end else begin
x_pos <= x_pos + 1;
end
end
endb. Line_Buffer 的缓冲
- 每次开启新的一行的数据,对Line_Buffer 全部复位
- 然后对对应的位置进行实际数据的填充
verilog
// Line buffer management
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
for (i = 0; i <= KERNEL_SIZE; i = i + 1)
for (j = 0; j < IMG_WIDTH + 2*PADDING; j = j + 1)
line_buffer[i][j] <= 0;
end else if (pixel_valid && current_state != IDLE) begin
if (x_pos == 0) begin
// Clear the line buffer row at the start of each new line
for (k = 0; k < IMG_WIDTH + 2*PADDING; k = k + 1)
line_buffer[y_pos % (KERNEL_SIZE + 1)][k] <= 0;
end
line_buffer[y_pos % (KERNEL_SIZE + 1)][x_pos + PADDING] <= pixel_in;
end
endc .Window position tracking
- 复位、一帧图片的开始或即将进入PROCESS状态,对window记位进行复位
- 当前状态位PROCESS状态,同时没有超过当前图片的高度时,对window的位置进行对应的变化
verilog
// Window position tracking
always @(posedge clk or negedge rst_n) begin
if (!rst_n || frame_start || (current_state == LOAD && next_state == PROCESS)) begin
x_window <= 0;
y_window <= 0;
end else if (current_state == PROCESS && y_window < IMG_HEIGHT) begin
if (x_window + STRIDE >= IMG_WIDTH) begin
x_window <= 0;
y_window <= y_window + STRIDE;
end else begin
x_window <= x_window + STRIDE;
end
end
endd. window_buffer的处理
verilog
// Window generation and output
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
window_valid <= 0;
for (i = 0; i < KERNEL_SIZE; i = i + 1)
for (j = 0; j < KERNEL_SIZE; j = j + 1)
window_buffer[i][j] <= 0;
end else begin
window_valid <= 0; // Default
if (current_state == PROCESS &&
x_window < IMG_WIDTH &&
y_window < IMG_HEIGHT &&
y_window + (KERNEL_SIZE>>1) <= y_pos) begin
// Generate window
for (i = 0; i < KERNEL_SIZE; i = i + 1) begin
for (j = 0; j < KERNEL_SIZE; j = j + 1) begin
src_y = y_window + i - (KERNEL_SIZE>>1);
src_x = x_window + j - (KERNEL_SIZE>>1);
if (src_y >= 0 && src_y < IMG_HEIGHT &&
src_x >= 0 && src_x < IMG_WIDTH) begin
window_buffer[i][j] <= line_buffer[src_y % (KERNEL_SIZE + 1)][src_x + PADDING];
end else begin
window_buffer[i][j] <= 0; // Padding
end
end
end
window_valid <= 1;
end
end
end当window坐标没有超过图片大小,确保可以生成窗口时,获取生成。对KERNEL_SIZE>>1,等价于KERNEL_SIZE/2,表示中心位置的偏移量
e.g.
bash
[0,0] [0,1] [0,2] [-1,-1] [-1, 0] [-1,+1]
[1,0] [1,1] [1,2] -> [ 0,-1] [ 0, 0] [ 0,+1] <- (1,1)是中心
[2,0] [2,1] [2,2] [+1,-1] [+1, 0] [+1,+1]这样就可以将卷积索引转换为相对于中心的坐标,这样可以用于判断是否越界,从而进行padding补充
以KERNEL_SIZE=3为例
| 卷积核位置 | src坐标计算 | 结果 | 取值 |
|---|---|---|---|
| 0,0 | scr_y=0+0-1=-1 | 越界 | padding |
| 0,1 | src_y=0+0-1=-1 | 越界 | padding |
| 0,2 | src_y=0+0-1=-1 | 越界 | padding |
| 1,0 | src_x=0+0-1=-1 | 越界 | padding |
| 1,1 | src_y=0,src_x=0 | 有效 | 原图0,0 |
| 1,2 | src_y=0,src_x=1 | 有效 | 原图0,1 |
| 2,0 | src_x=0+0-1=-1 | 越界 | padding |
| 2,1 | src_y=1,src_x=0 | 有效 | 原图1,0 |
| 2,2 | scr_y=1,src_x=1 | 有效 | 原图1,1 |
e. 数据窗口的展平
将原本二维的的数据(宽为KERNEL_SIZE, 高为KERNEL_SIZE, 位宽为DATA_WIDTH)的数据,按照从罪小位排在最高位的顺序,压缩成一维的数据
verilog
// Flatten window buffer for output
always @(*) begin
for (i = 0; i < KERNEL_SIZE; i = i + 1) begin
for (j = 0; j < KERNEL_SIZE; j = j + 1) begin
window_out[(KERNEL_SIZE*KERNEL_SIZE-(i*KERNEL_SIZE+j))*DATA_WIDTH-1 -: DATA_WIDTH] = window_buffer[i][j];
end
end
end
endmodule测试
verilog
`timescale 1ns / 1ps
module window_tb();
// 测试用参数 - 使用小尺寸便于观察
parameter DATA_WIDTH = 8;
parameter IMG_WIDTH = 32;
parameter IMG_HEIGHT = 32;
parameter KERNEL_SIZE = 3;
parameter STRIDE = 1;
parameter PADDING = (KERNEL_SIZE - 1) / 2;
// 测试信号
reg clk;
reg rst_n;
reg [DATA_WIDTH-1:0] pixel_in;
reg pixel_valid;
reg frame_start;
wire [KERNEL_SIZE*KERNEL_SIZE*DATA_WIDTH-1:0] window_out;
wire window_valid;
// 实例化被测模块
window #(
.DATA_WIDTH(DATA_WIDTH),
.IMG_WIDTH(IMG_WIDTH),
.IMG_HEIGHT(IMG_HEIGHT),
.KERNEL_SIZE(KERNEL_SIZE),
.STRIDE(STRIDE),
.PADDING(PADDING)
) dut (
.clk(clk),
.rst_n(rst_n),
.pixel_in(pixel_in),
.pixel_valid(pixel_valid),
.frame_start(frame_start),
.window_out(window_out),
.window_valid(window_valid)
);
// 时钟生成
initial begin
clk = 0;
forever #5 clk = ~clk;
end
// 测试数据 - 5x5图像
reg [DATA_WIDTH-1:0] test_image [0:IMG_HEIGHT-1][0:IMG_WIDTH-1];
// 窗口计数器
integer window_count = 0;
// 初始化测试图像
task reset_test_image;
integer i, j;
begin
for(i = 0; i < IMG_HEIGHT; i = i + 1) begin
for(j = 0; j < IMG_WIDTH; j = j + 1) begin
test_image[i][j] =0;
end
end
end
endtask
task init_test_image;
integer i, j;
begin
for(i = 0; i < IMG_HEIGHT; i = i + 1) begin
for(j = 0; j < IMG_WIDTH; j = j + 1) begin
test_image[i][j] = i * IMG_WIDTH + j + 1;
end
end
end
endtask
// 显示测试图像
task display_test_image;
integer i, j;
begin
$display("\n=== 4x4 Test Image ===");
for(i = 0; i < IMG_HEIGHT; i = i + 1) begin
$write("Row %0d: ", i);
for(j = 0; j < IMG_WIDTH; j = j + 1) begin
$write("%3d ", test_image[i][j]);
end
$display("");
end
$display("======================\n");
end
endtask
// 发送一帧图像数据
task send_frame;
integer i, j;
begin
$display("Sending 4x4 frame...");
init_test_image();
display_test_image();
// 发送frame_start信号
@(posedge clk);
frame_start = 1;
@(posedge clk);
frame_start = 0;
// 逐像素发送数据
for(i = 0; i < IMG_HEIGHT; i = i + 1) begin
for(j = 0; j < IMG_WIDTH; j = j + 1) begin
@(posedge clk);
pixel_in = test_image[i][j];
pixel_valid = 1;
$display("Sending pixel[%0d][%0d] = %0d at time %0t", i, j, pixel_in, $time);
end
end
@(posedge clk);
pixel_valid = 0;
$display("All pixels sent at time %0t", $time);
end
endtask
// 主测试序列
initial begin
$display("========================================");
$display("Window Test - Focus on Last Window");
$display("IMG_SIZE: %0dx%0d, KERNEL: %0dx%0d", IMG_WIDTH, IMG_HEIGHT, KERNEL_SIZE, KERNEL_SIZE);
$display("Expected windows: %0d", IMG_WIDTH * IMG_HEIGHT);
$display("========================================");
// 初始化信号
rst_n = 0;
pixel_in = 0;
pixel_valid = 0;
frame_start = 0;
reset_test_image();
// 复位序列
repeat(5) @(posedge clk);
rst_n = 1;
repeat(3) @(posedge clk);
// 发送测试帧
send_frame();
// 等待所有窗口输出
repeat(50) @(posedge clk);
$display("\n========================================");
$display("Test Summary:");
$display("Total Windows Generated: %0d", window_count);
$display("Expected Windows: %0d", IMG_WIDTH * IMG_HEIGHT);
if(window_count == IMG_WIDTH * IMG_HEIGHT) begin
$display("SUCCESS: All windows generated!");
end else begin
$display("FAILURE: Missing windows!");
end
$display("========================================");
$finish;
end
// 窗口监控
always @(posedge clk) begin
if(window_valid) begin
window_count = window_count + 1;
$display("Window %0d: pos(%0d,%0d) at time %0t",
window_count, dut.x_window, dut.y_window, $time);
// 显示窗口内容
$write("Window content: ");
$write("[%0d %0d %0d] ",
window_out[71:64], window_out[63:56], window_out[55:48]);
$write("[%0d %0d %0d] ",
window_out[47:40], window_out[39:32], window_out[31:24]);
$write("[%0d %0d %0d]",
window_out[23:16], window_out[15:8], window_out[7:0]);
$display("");
end
end
// 状态机监控
reg [1:0] prev_state = 2'b00;
always @(posedge clk) begin
if(dut.current_state != prev_state) begin
case(dut.current_state)
2'b00: $display("Time %0t: State -> IDLE", $time);
2'b01: $display("Time %0t: State -> LOAD", $time);
2'b10: $display("Time %0t: State -> PROCESS", $time);
default: $display("Time %0t: State -> UNKNOWN(%0d)", $time, dut.current_state);
endcase
prev_state = dut.current_state;
end
end
// 波形转储
initial begin
$dumpfile("window_tb.vcd");
$dumpvars(0, window_tb);
// 限制仿真时间
#2000;
$display("ERROR: Simulation timeout!");
$finish;
end
endmodule 结果
输入数据
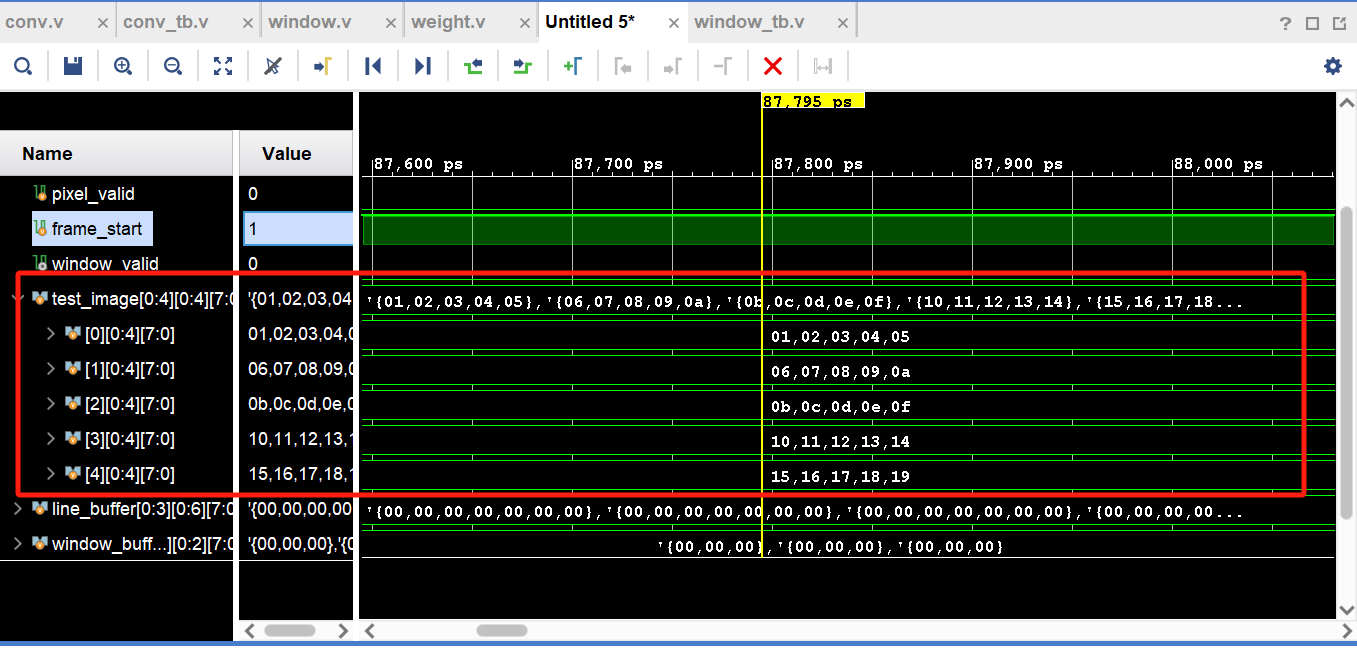
Row 0: 1 2 3 4 5
Row 1: 6 7 8 9 10
Row 2: 11 12 13 14 15
Row 3: 16 17 18 19 20
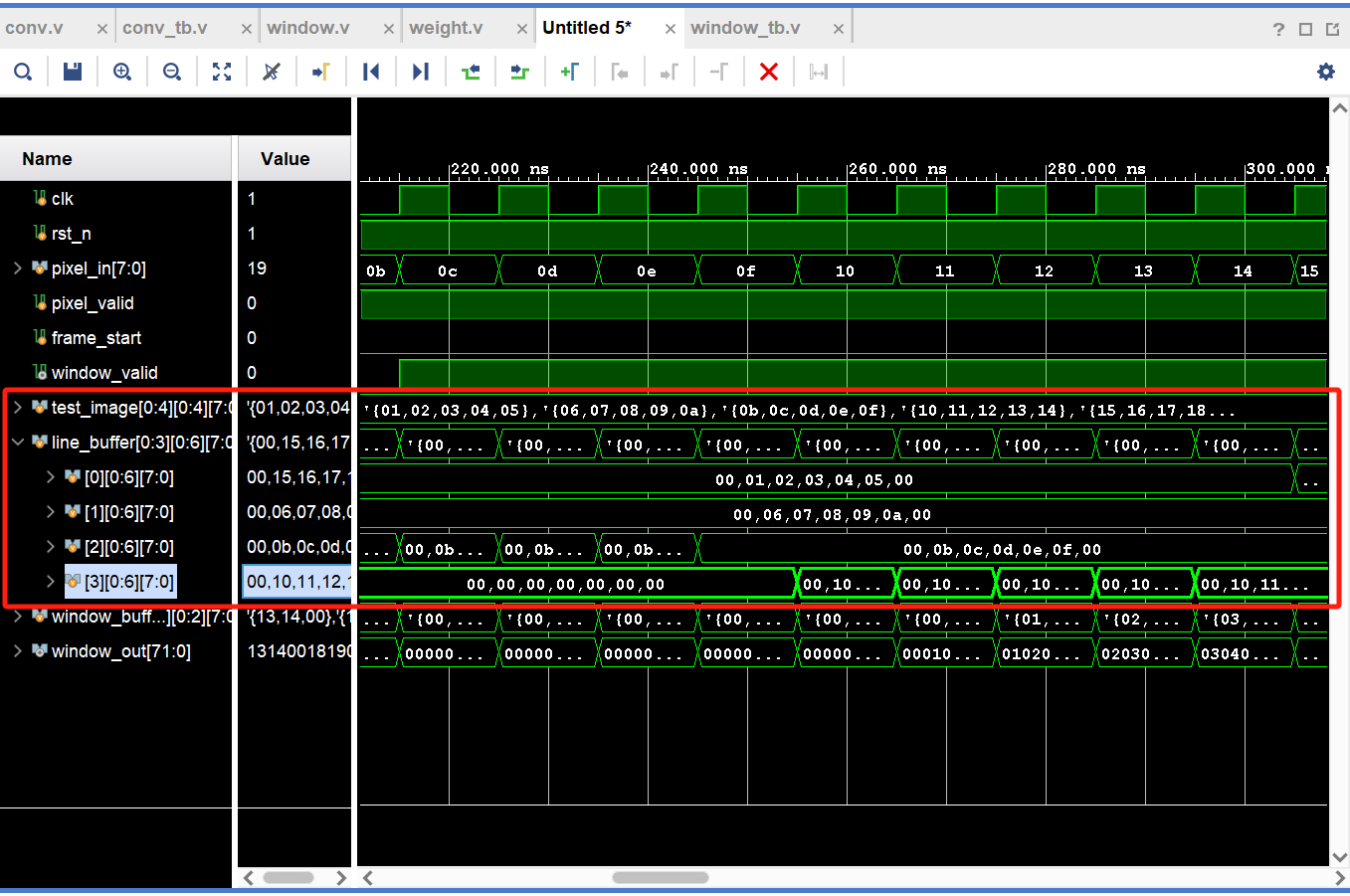
Line_Buffer 缓冲数据
Window_Buffer输出数据
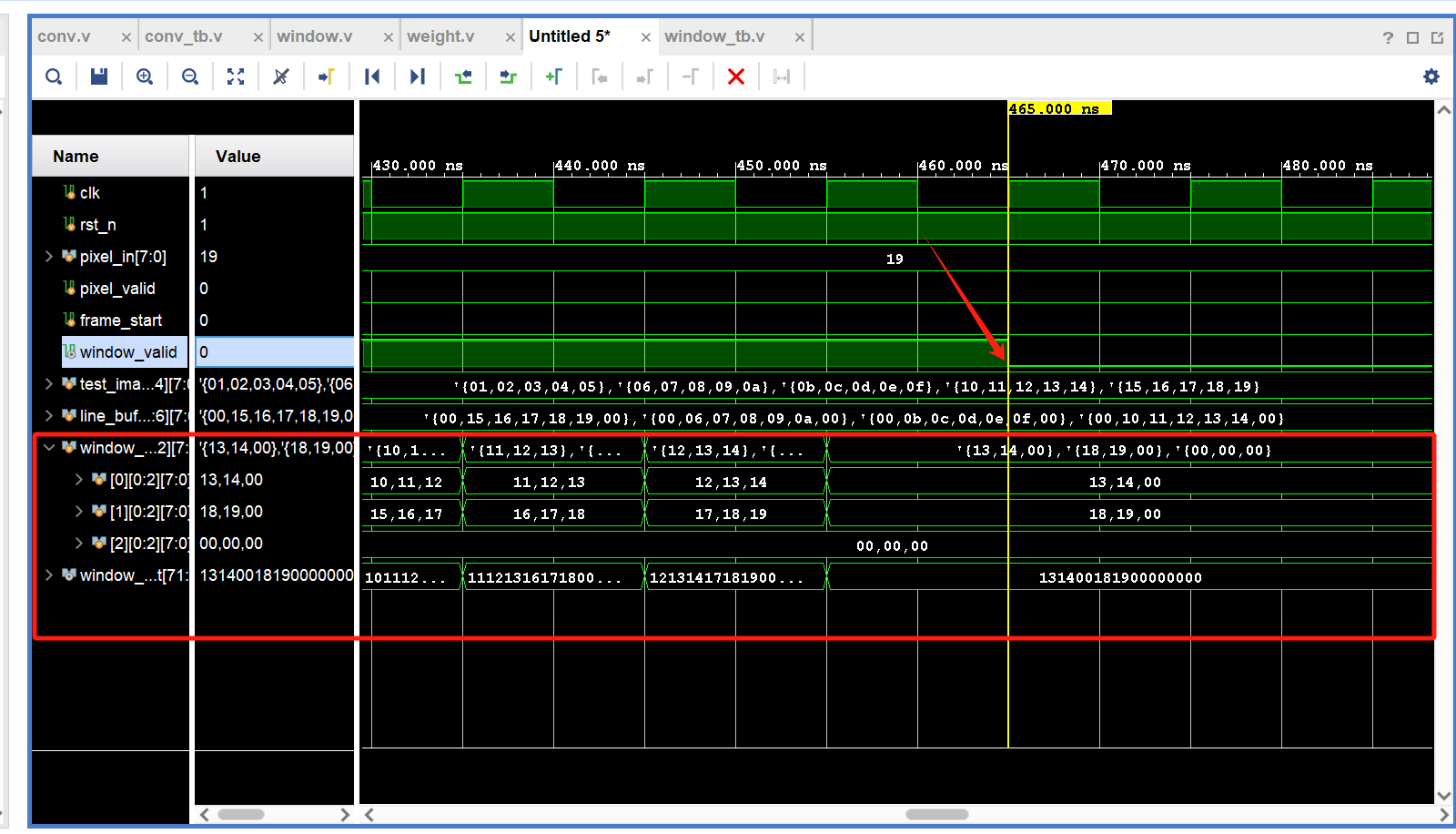
valid为高,window_buffer开始提取line_buffer数据,同时输出展平的window_out;
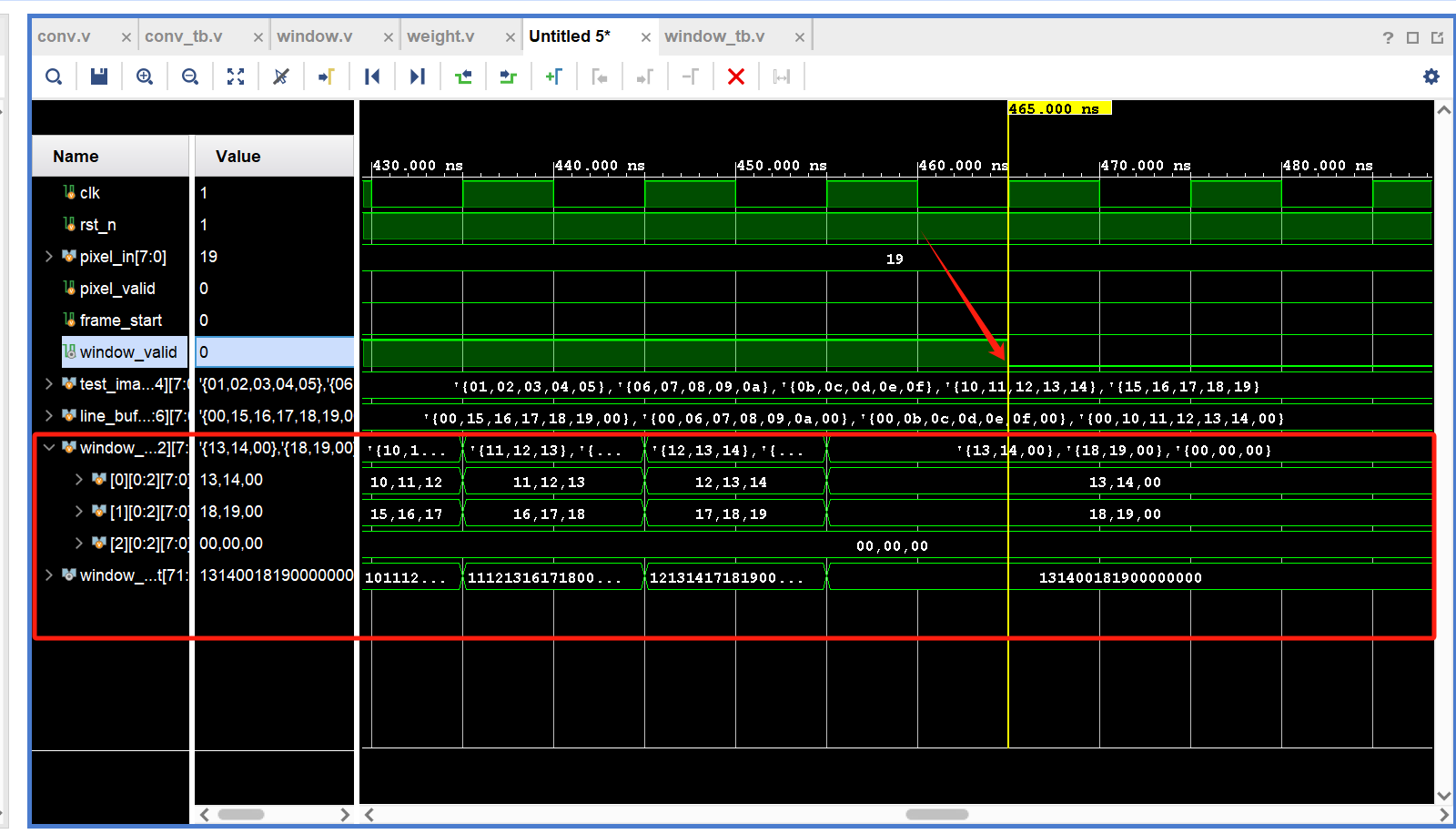
window_buffer提取完毕,valid拉低