若您有更多想法或问题,欢迎加入 OpenLoong 开源社区,查看关于复旦大学陈涛团队提出的「C大脑模型」的更多向相关内容,并在论坛发起讨论,与国地中心的技术专家深入交流,碰撞出更多技术灵感与实践火花!
在上一篇,我们解读了ABC大脑中从"听懂人话"到"制定计划"的前两个阶段,今天将继续剖析ABC大脑的最后一环------控制大脑(C)------将接手整个系统的最终执行任务。它是机器人与物理世界互动的桥梁,决定了动作能否准确、稳定地落地执行。
本篇将深入剖析控制大脑(C)的核心职能与实现路径,介绍如逆运动学、模型预测控制、动态阻抗控制等关键技术,解析真实落地项目中的工程方案,并探讨以C大脑为代表的控制模块,如何正在与上层大模型进一步融合,迈向端到端的一体化智能架构。
同时,我们也将展望其未来可能的演化方向------从模块化向紧耦合、从指令驱动到语义内生、从"ABC串联"向"AB融合C"或"端到端一体化"的新范式转变,探讨ABC大脑如何成为支撑通用型具身智能体的关键基础架构。
C - 控制大脑(Control Brain)
在ABC大脑架构中,C模块,即**"控制大脑"(Control Brain)**,是机器人完成任务的最后一环,也是最贴近物理世界的环节。它的职责是将来自上层(B模块)的动作计划转化为对执行器(电机、关节、机械臂等)的实时控制信号,从而实现平稳、精确、鲁棒的动作执行。
为了实现从高层抽象动作到低层物理控制的闭环运行,C模块通常采用以下技术路径:
首先,通过**逆运动学(Inverse Kinematics, IK)**将目标位置/姿态转化为各个关节的运动角度;
随后,使用模型预测控制(Model Predictive Control, MPC),在考虑动力学约束和预测轨迹的前提下进行优化控制;
同时,结合动态阻抗控制(Impedance Control),实现对环境不确定性的自适应,例如人在与机器人身体发生接触时的柔性响应。
为了实现真正的"闭环控制",C大脑还需集成多种传感器输入。通常会使用IMU(惯性测量单元)、视觉传感器、本体传感器(如编码器、电流/力传感器)进行融合感知(Sensor Fusion),在控制周期内不断获取实时状态,并用于调整控制输出,实现对外部环境的快速适应和姿态稳定。
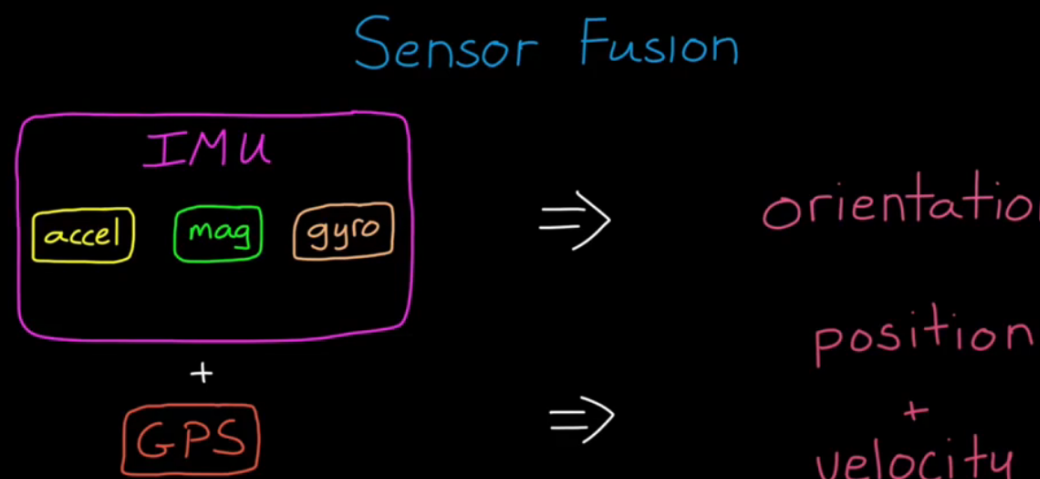
图片来源互联网
在工程实现层面,C模块往往基于ROS 2 控制框架(如 ros2_control)与 MoveIt 运动规划插件实现模块管理与控制流水线;底层则通过专用控制芯片或微控制器完成高频控制(如500Hz以上的扭矩/电流控制),确保实时性。
目前已有多个高性能平台展示了这一架构的可行性与工程落地。例如,Unitree Robotics 的 Go1 和 Aliengo 使用自研控制栈,实现对高自由度腿部结构的动态平衡控制与跳跃动作;在国内开源项目 OpenLoong 中,也展示了如何将 C模块与高层大模型结构进行耦合、适配与实时联动,具备极强的参考价值。

总体而言,控制大脑不仅是智能体"动起来"的关键环节,更是连接"认知-决策"与"物理现实"的技术桥梁。其稳定性、实时性与自适应性,直接决定了具身智能系统是否能真正从"模拟世界"落地到"现实物理空间"。
揭秘「C大脑模型」--- 人形机器人的未来大脑如何构建?
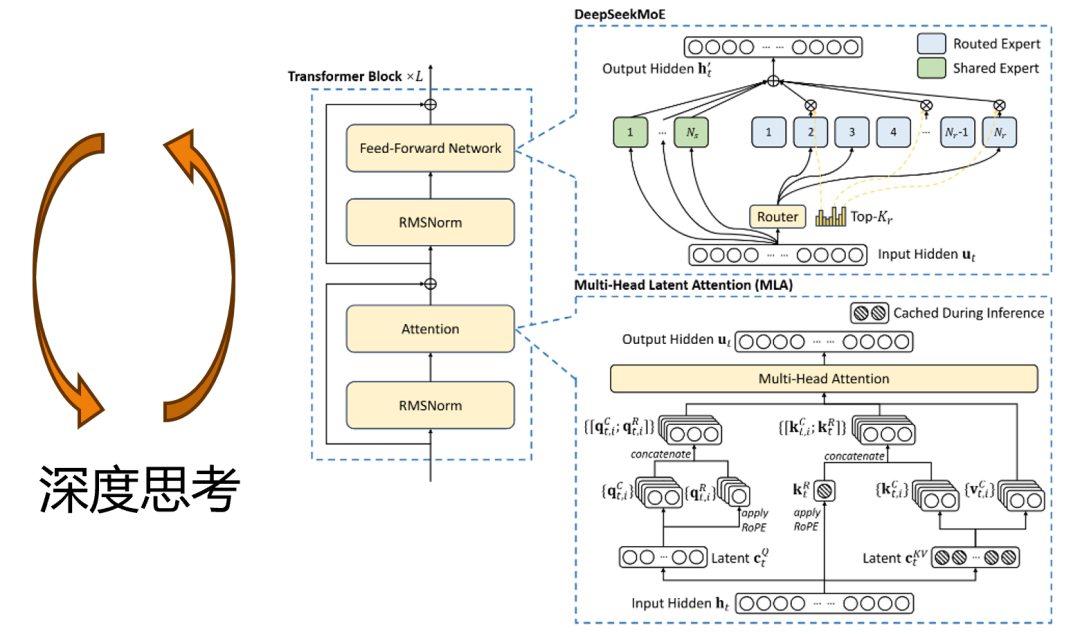
复旦大学陈涛团队提出的「C大脑模型」,是一个融合决策系统(DS)与实时GPT大模型的智能控制中枢,旨在赋予人形机器人类似人脑的认知与动作能力。这一模型不仅能理解自然语言,还能结合多模态信息进行推理与物理动作规划,标志着AI从"能说话"向"能行动"的关键跃迁。
C大脑模型从传统大语言模型(LLM)演进为多模态语言-动作大模型(MLLA),实现了从语言理解到动作生成的端到端闭环。系统可通过语言输入理解任务内容,并借助动作解码模块与特征对齐机制,输出可执行的物理动作指令。同时,系统通过模拟器和强化学习机制不断优化决策策略,提升与真实物理世界的交互效率。
针对训练数据昂贵、算力消耗高等现实挑战,陈涛教授团队提出了"轻量化三部曲":
数据剪枝 ------ 精简训练样本,保留核心数据;

多专家适配器(Adapter-X)------ 实现高效微调,提升模型适应性;
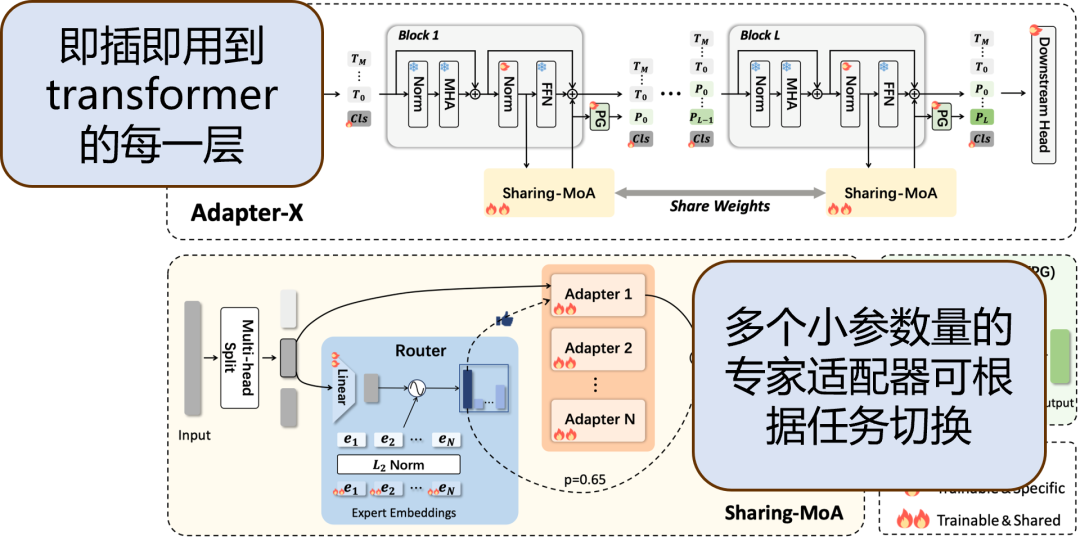
模型融合(EMR-Merging) ------ 无需调参地将多个小模型整合为一个通用模型。
此外,该模型还支持在低算力设备上分布式训练。通过模型切割、软硬协同优化与流水线并行等技术手段,C大脑使大模型训练与部署更具现实可行性。配合自研的"感-算-控"一体芯片,C大脑构建起从感知、计算到控制的完整闭环,具备主动感知、任务规划与情感交互等能力。
该模型的推出,标志着人形机器人正逐步迈入"像人一样思考和行动"的新时代。它不仅是具身智能的一次范式革新,也为未来机器人技术的发展开辟了新路径。
为什么要分ABC?协同难点与未来融合趋势
为什么要把具身智能系统划分为A(感知与认知)、B(规划与决策)、C(控制与执行)三层?因为这种模块化架构不仅利于系统开发和调试 ,也便于替换、升级单一模块,并支持灵活接入如大模型、强化学习等多种算法框架。
但现实中,三层之间的协同仍面临不少挑战。例如,动作语义的中间表示尚未统一,导致感知与控制间"对不上口径";大模型带来的计算延迟,也很难满足实时控制的需求;再加上感知、语言、动作等多模态数据融合的高成本,进一步增加了系统复杂度。
图片来源互联网
**未来趋势正在逐渐改变这一局面。**一方面,大模型与控制模块正朝一体化方向演进(如End-to-End Policies),实现"看→想→动"全链路整合。另一方面,语义层协议如OpenSkill、Action Graph语言等逐渐标准化,提升各模块之间的协同效率。
最终,我们可能看到"ABC"架构的形态发生变革**:A与B深度融合、B与C部分融合,出现A→BC、AB→C等更紧耦合的结构,技术上,这一模块正逐渐以多模态大模型(Multimodal Foundation Models)为核心展开**。例如,Google提出的 RT-2(Robotic Transformer 2) 模型实现了语言、视觉与动作控制的融合,能够将人类的自然语言指令转化为对机器人有意义的动作计划;而 MiniGPT-4 等轻量级多模态模型也已被多个团队用于机器人指令解析。这些变革让机器人既能理解语义、又能精准行动,朝着"神似人类"的目标更进一步。

Google RT-2 (图片来源互联网)
架构之外,我们需要更大的生态协同
尽管ABC大脑架构为具身智能系统提供了一套清晰的模块划分与技术路径,但它的意义远不止于"感知-决策-控制"的技术堆叠。更重要的是,ABC代表了一种以任务为核心、以闭环为导向的系统设计哲学------从多模态理解世界(A)、再到智能规划与动作生成(B)、最终以物理控制完成反馈(C),构成一个"感知-认知-行动"的完整循环。
然而,要让这套架构真正落地并持续进化,靠单一团队或项目远远不够。我们更需要构建一个开放、协同的生态系统:包括统一的接口协议(如动作语义语言、控制中间表示)、跨平台的模块标准、可复用的数据格式和工具链,以及社区共建的测试环境与验证基准。这种生态建设,将决定未来通用具身智能能否从"能做演示"走向"可规模部署"。
ABC大脑架构是一种起点,也是一种方法论。它不仅连接了模型与现实,更连接了研究者、工程师、产业链与开源社区。真正的具身智能时代,不只是单个大脑变得聪明,而是整个系统、甚至整个社会------从算法到硬件、从实验室到应用场景------实现深度协同。我们需要的,不只是更强的大模型,更是更紧密的协作网络。