阶段三:PLC 编程 (SCL 语言) (为了学会结构体和I/O映射可能看着有点复杂,多电机控制及维护好修改)
程序结构思路:
-
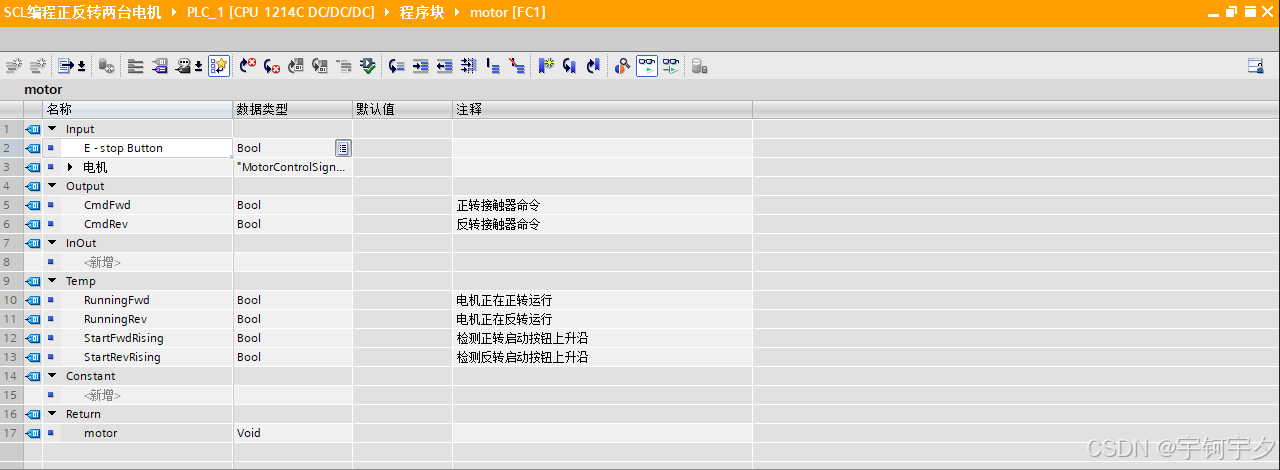
定义清晰的数据结构 (`STRUCT`) 来管理每台电机的所有变量(输入、输出、状态、互锁条件)。
-
创建功能块 (`FC` 或 `FB`) 来实现单台电机的正反转控制逻辑。该功能块应足够通用,只需传入不同的输入/输出地址和互锁条件即可控制不同的电机。
-
在主程序 (`OB1`) 中实例化调用两次该功能块,分别控制 M1 和 M2。
-
处理急停等全局信号。
SCL 代码 (西门子 TIA Portal 环境):
// 结构体创建

// 定义单台电机正反转控制的功能块 (FC)
// 检测按钮上升沿

// 核心控制逻辑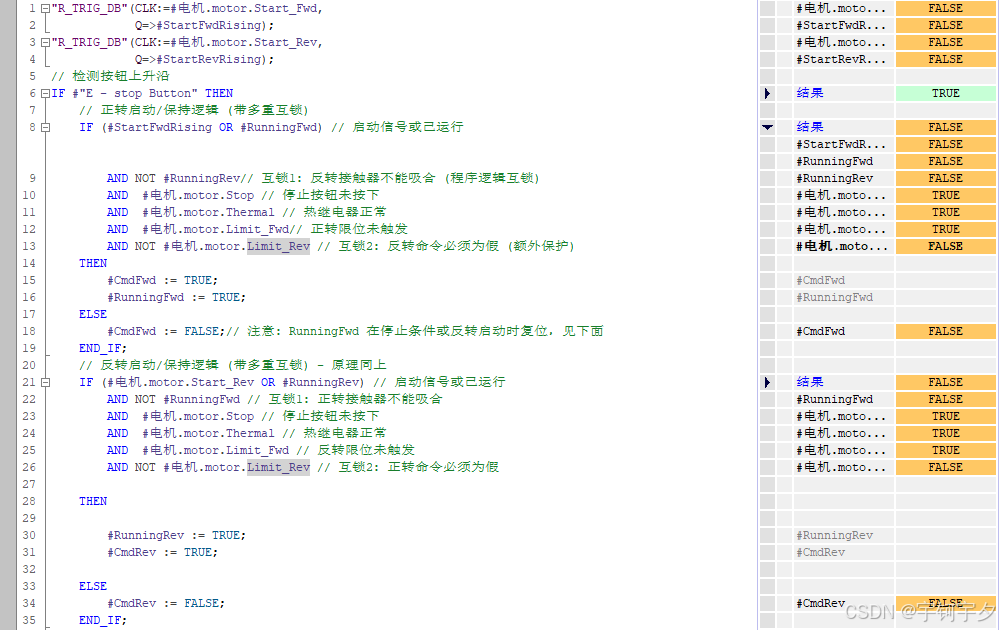
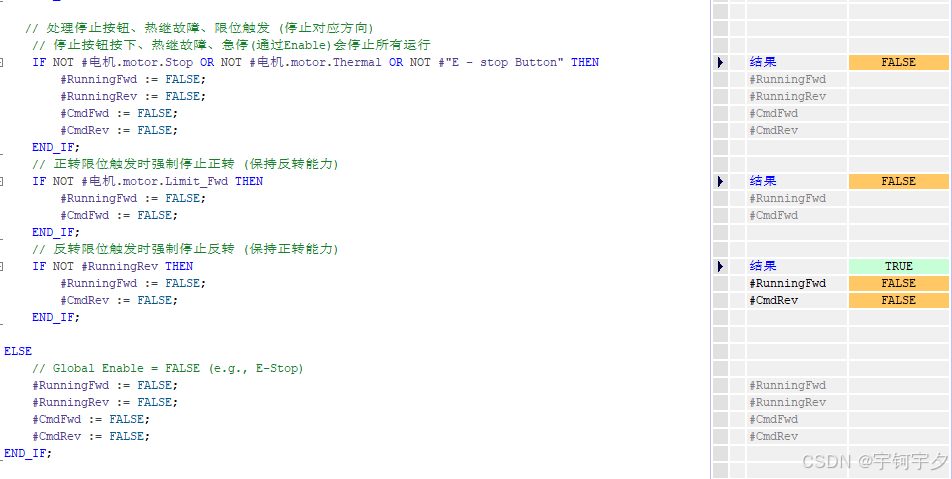
// 处理停止按钮、热继故障、限位触发 (停止对应方向)
// 停止按钮按下、热继故障、急停(通过Enable)会停止所有运行
// 主程序 (OB1)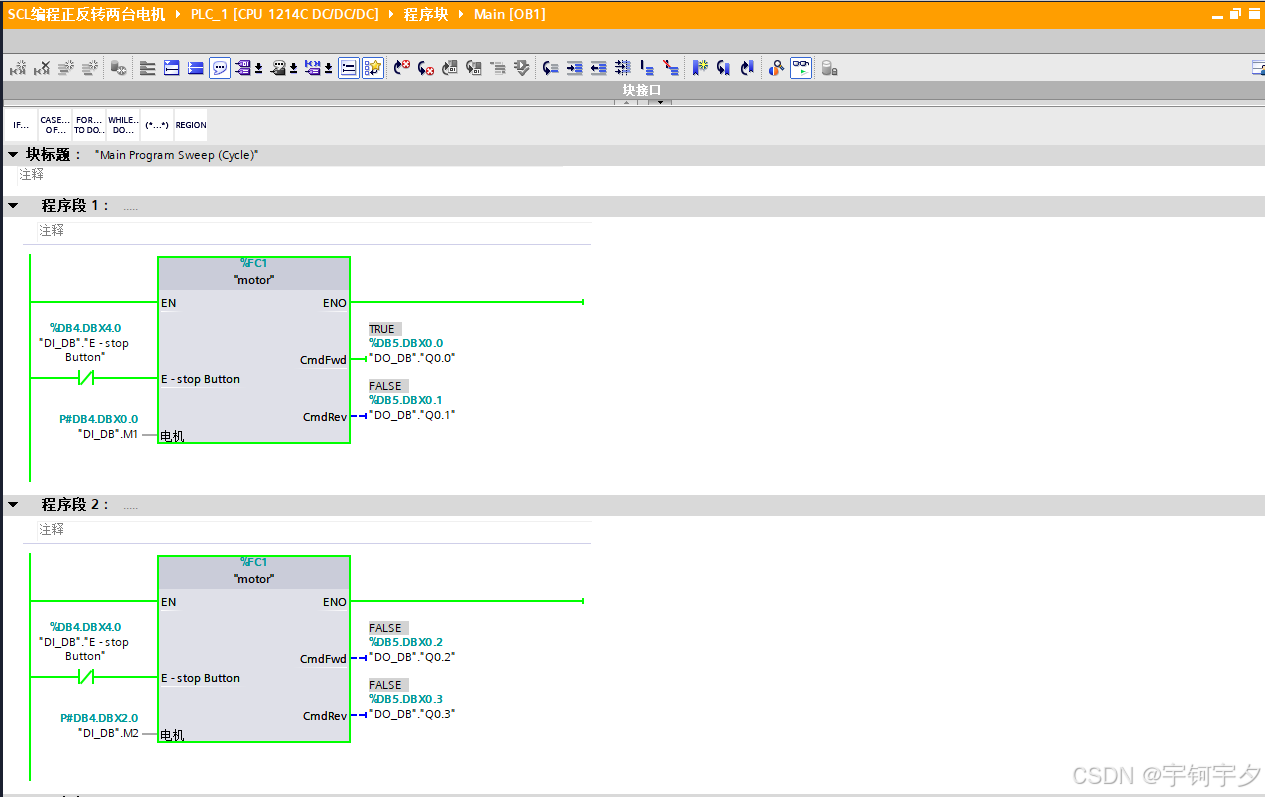
// 映射实际 PLC I/O 地址到结构体成员 (根据你的硬件配置修改地址!)
// --- 输入映射 (例如) ---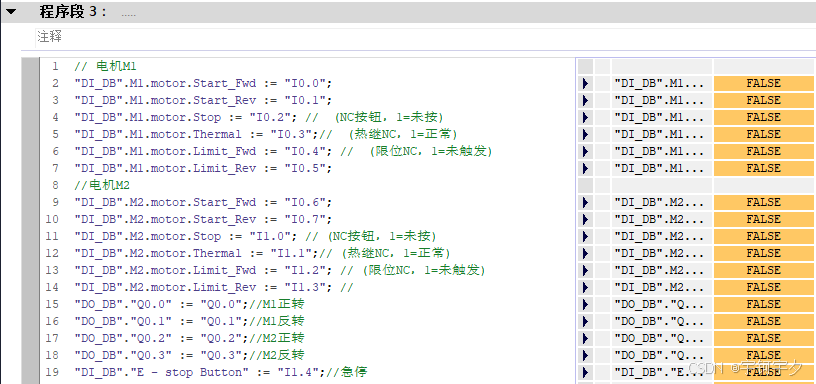
阶段四:调试
安全第一! 调试前务必确认:
所有电源已断开 (`QF1`, `QF2`, PLC 电源)。
主回路接线正确无误,相序检查 (尤其换相部分)。
控制回路接线正确,特别是互锁触点。
急停回路硬接线正确且有效。
- 上电前检查:
使用万用表检查主回路相间、对地绝缘电阻。
检查控制回路有无短路(特别是 24VDC 对 0V)。
检查所有端子紧固无松动。
确保断路器处于 OFF 状态。
- PLC 与 HMI 初步调试:
只接通 PLC 电源和控制回路电源 (断开主回路电源 `QF1`, `QF2`)。
下载程序到 PLC。
监控 PLC 程序:操作按钮,观察 PLC 输入点状态变化是否正确。
观察 PLC 内部逻辑 (`Motor1_Signals.RunningFwd/Rev`, `CmdFwd/Rev`) 是否按预期变化。
观察 PLC 输出点指示灯或使用强制表 (`Force Table`),看输出命令 (`DO0..DO3`) 是否按逻辑正确动作。
测试急停按钮、热继模拟信号 (`DI6, DI7, DI8`),观察 `Enable` 信号是否变为 FALSE,所有 `CmdFwd/Rev` 是否立即变为 FALSE。
测试限位开关模拟信号,观察对应方向的运行命令是否被取消。
(如有 HMI) 测试 HMI 画面操作和状态显示。
- 空载测试 (不带电机负载):
主回路断电 (`QF1`, `QF2` OFF) 状态保持。
接通控制回路电源。
手动按压接触器衔铁,模拟吸合。检查 `KM1_Fwd` 吸合时,`KM1_Rev` 是否因机械/电气互锁无法吸合,反之亦然。`KM2` 同理。
通过 PLC 程序操作:
尝试启动 M1 正转:`DO0` 应亮,`KM1_Fwd` 应吸合,`KM1_Rev` 绝对不吸合。
尝试在 M1 正转运行时启动 M1 反转:`DO1` 应不亮,`KM1_Rev` 应不吸合 (程序互锁和物理互锁生效)。
按下 M1 停止按钮:`KM1_Fwd` 应释放。
模拟 M1 热继动作 (`DI7`=0):`KM1_Fwd/Rev` 应立即释放。
模拟 M1 正限位触发 (`DI9`=0):`KM1_Fwd` 应释放,但应能启动反转。
按下急停按钮 (`DI1.4=0):所有接触器 (`KM1_Fwd`, `KM1_Rev`, `KM2_Fwd`, `KM2_Rev`) 应立即释放。
重复以上测试验证 M2 逻辑。
测试 M1 和 M2 同时操作是否相互独立无干扰。
- 带电机空载测试 (电机不连接机械负载):
确保电机周围安全,人员远离旋转部件。
合上主回路断路器 (`QF1`, `QF2`)。
点动测试:短促按下正转/反转启动按钮,观察:
电机转向是否符合预期 (正转、反转)。
是否有异常噪音、振动、火花。
接触器吸合/释放是否干脆利落。
连续运行测试: 启动正转,运行几秒后停止。再启动反转,运行几秒后停止。观察运行是否平稳,停止是否及时。
互锁测试:
在 M1 正转运行时,尝试启动 M1 反转:电机应 *不会* 反转,可能正转会停止(取决于程序逻辑),且不应有接触器同时吸合的噪音(物理互锁起作用)。
尝试同时启动 M1 正转和 M2 反转等组合:应互不影响。
保护功能测试:
在电机运行时,按下急停:电机应立即停止。
在电机运行时,模拟触发热继 (`FR1` 测试按钮或断开其信号线):电机应立即停止,且复位前不能启动。
在电机正转接近限位开关时,手动触发正限位开关:电机应停止正转。尝试反转应能启动。反转限位同理。
- 带负载测试:
将电机连接到实际机械负载。
重复步骤 4 中的测试(点动、连续、互锁、保护),特别注意:
启动是否顺畅,有无堵转。
运行电流是否在额定范围内(使用钳形表测量)。
停止时间是否符合要求(可能需要调整制动方式或参数)。
限位开关位置是否准确有效。
- 最终检查与文档:
检查所有接线端子是否紧固。
清理现场。
更新电气原理图、接线图、PLC 程序注释、设备参数表等文档。
对操作和维护人员进行培训。
关键安全注意事项总结
-
双重互锁: 正反转接触器之间必须同时具备 电气互锁 (程序 + 辅助触点硬接线)和 机械互锁,这是防止相间短路的生命线。
-
独立急停回路:急停按钮、热继触点、硬限位触点 (若用于安全) 必须通过硬接线串联在控制电源回路中,确保即使 PLC 故障也能切断动力电源。这是最高优先级的安全回路。
-
热继电器保护:正确设定整定电流 (`Ir = I_motor`),使用其 NC 触点切断控制回路并反馈给 PLC。
-
限位保护:使用物理限位开关防止机械超程损坏。建议接入 PLC 做逻辑处理,强烈建议其 NC 触点也接入前述的硬接线安全回路。
-
隔离与上锁挂牌 (LOTO):在进行任何接线、维护工作前,务必断开所有电源(主电源、控制电源),锁好断路器并挂警示牌。
-
接地 (PE):确保电机外壳、控制柜体等可靠接地。
-
程序互锁: PLC 程序内实现正反转命令互锁、按钮与运行状态互锁、保护条件互锁。
-
测试验证:严格按照调试步骤,特别是空载测试和互锁/保护功能测试,是确保系统安全可靠运行的关键。
这份指南提供了一个详细的框架。实际项目中,请务必严格遵守当地电气安全规范 (如 IEC 60204-1, NFPA 79 等) 和公司安全规程,并根据具体设备要求进行调整。