机器视觉1,学习了硬件的基本知识和选型,现在另外的教材巩固知识
选相机
1.先看精度 多少mm,被检测物体 长宽多少mm》分辨率,
选出合理范围内的相机
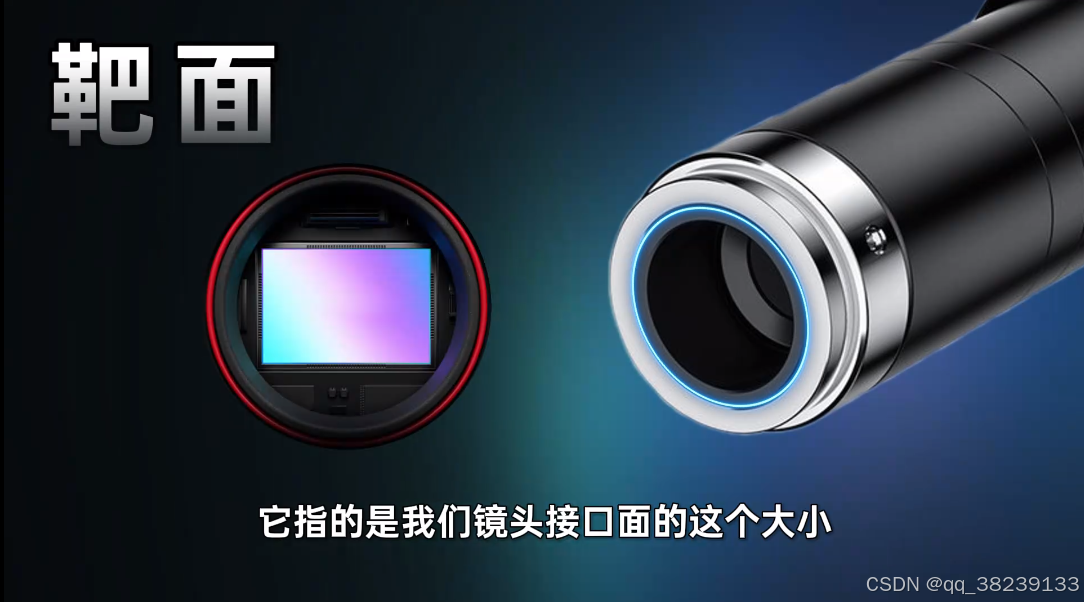
2.靶面尺寸,得出分辨率之后,其实这个靶面尺寸也就固定下来了,没得选。
靶面 影响进光量**,从而影响清晰度**
3.卷帘和全局的选择
看静态还是动态,动态必须全局
4.黑白和彩色的选择
黑白和彩色可能价格差别不大,而黑白的优势在于传输速度更快,彩色转黑白可能没黑白的清晰
5. 接口
千兆网口 ,USB口 便宜,其它3个快但贵,可能其采集卡更贵
工业镜头选型(上)
FA镜头
靶面的选择,
镜头靶面 大于等于 相机靶面,小于则被物理上的遮挡,形成黑色区域
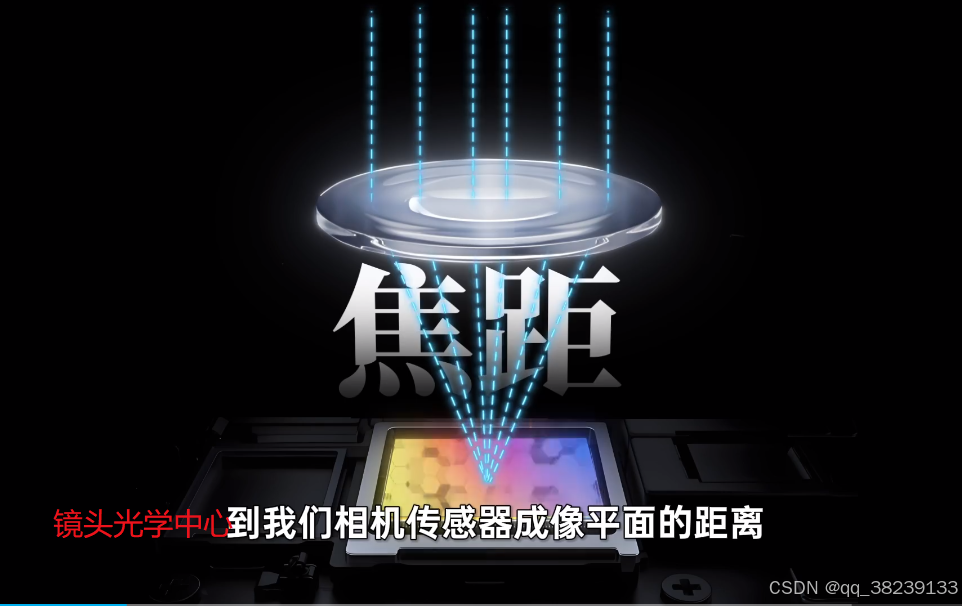
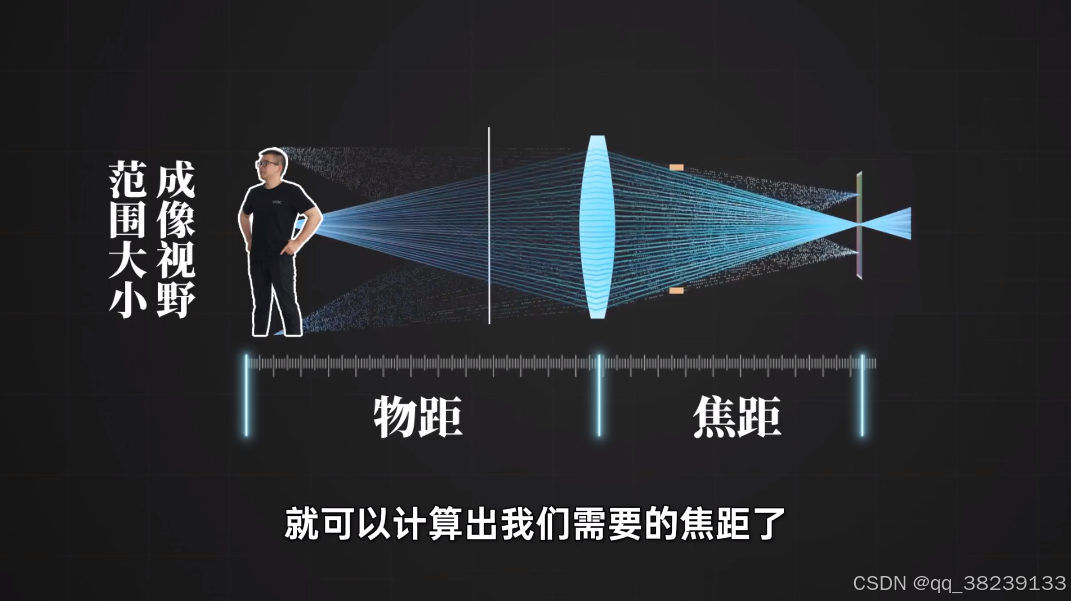
焦距
越近拍摄到的范围越大,即我们说的广角拍照
光圈的选择

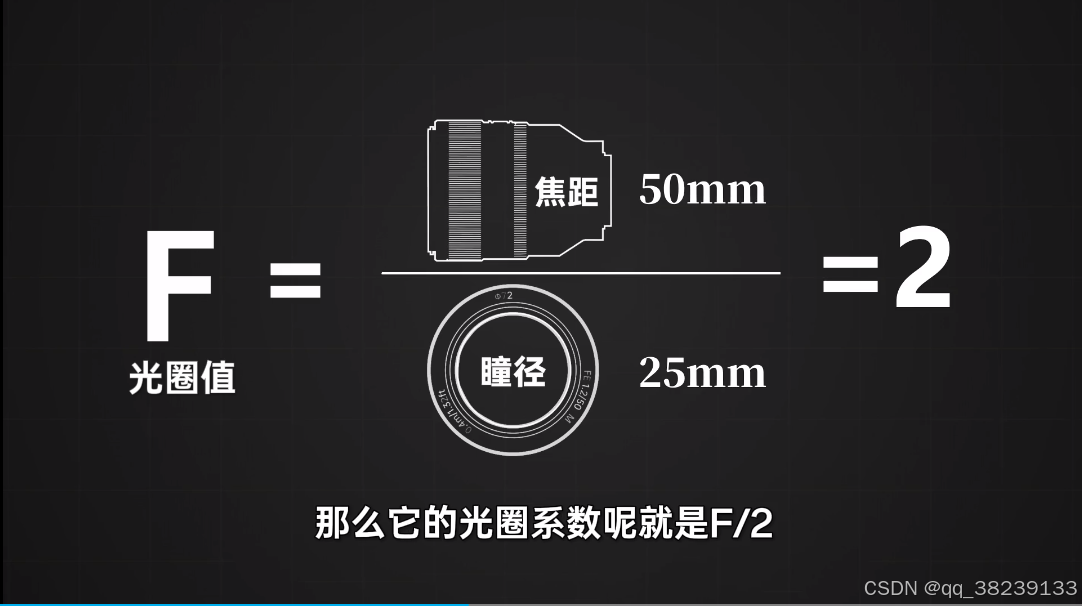
由上可得,系数越小,瞳径越大,大的进光越大
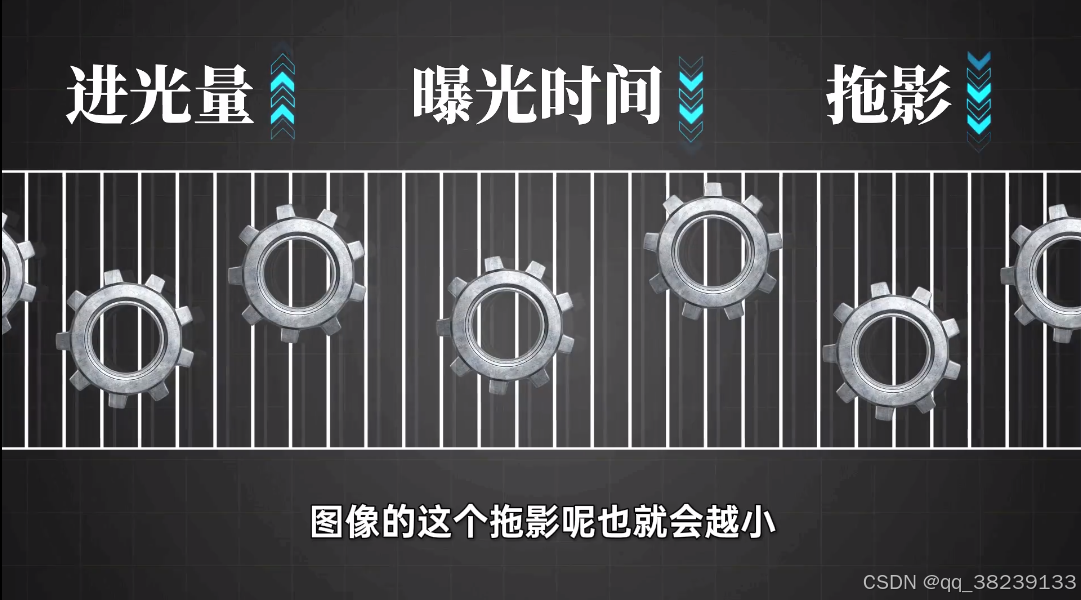
在动态拍摄中,进光量越大,曝光时间可以越短,拖影?可以越小
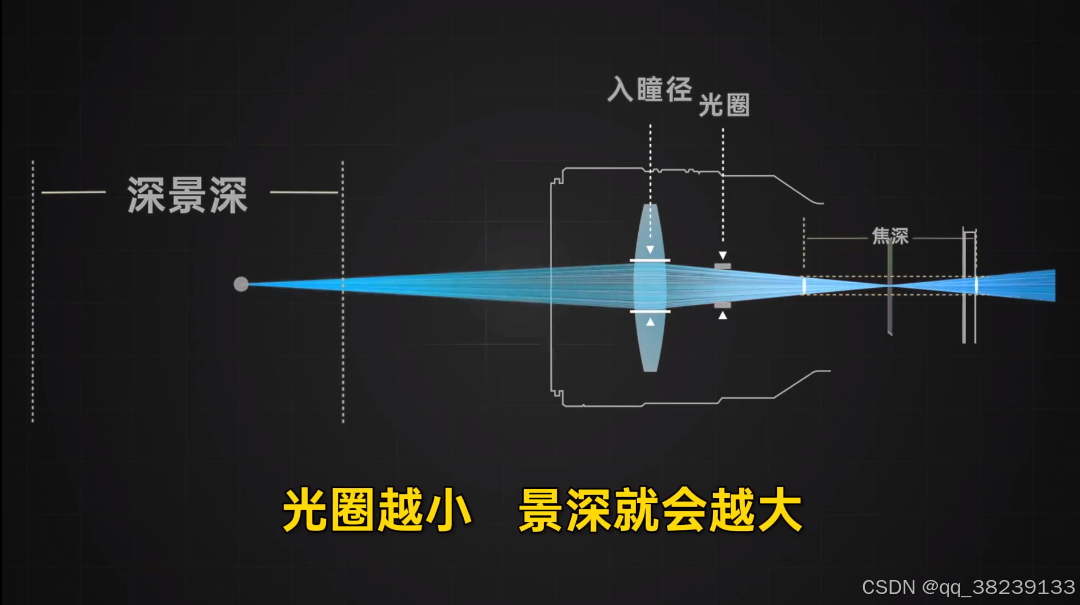
光圈对景深的影响
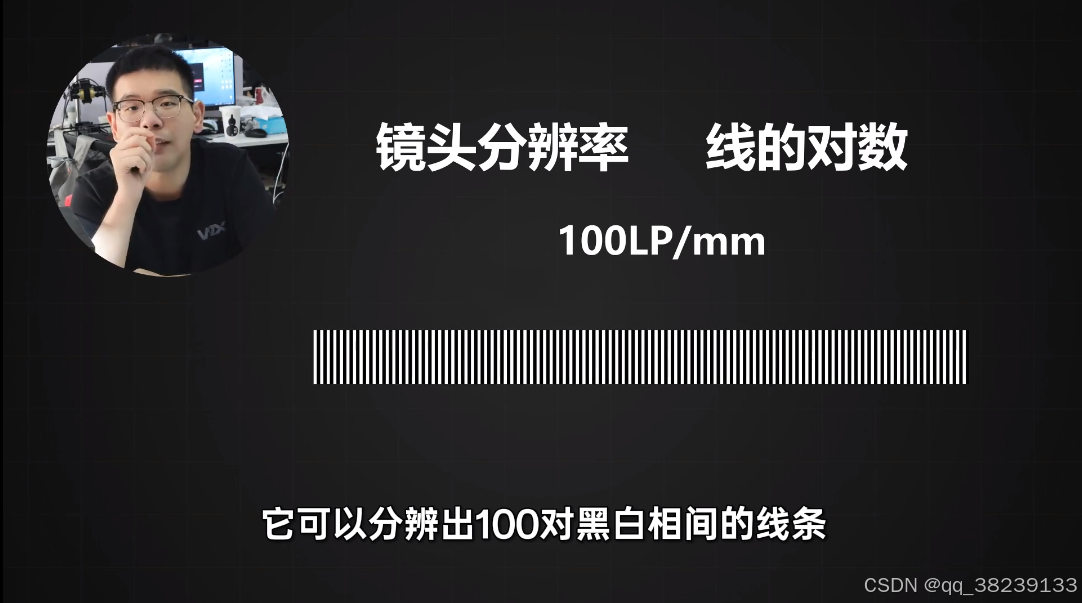
镜头的分辨率,
100LP/mm 即 没1mm, 可以分辨出100LP, LP是1组黑白相间的线,
市面上往往写几百万的分辨率
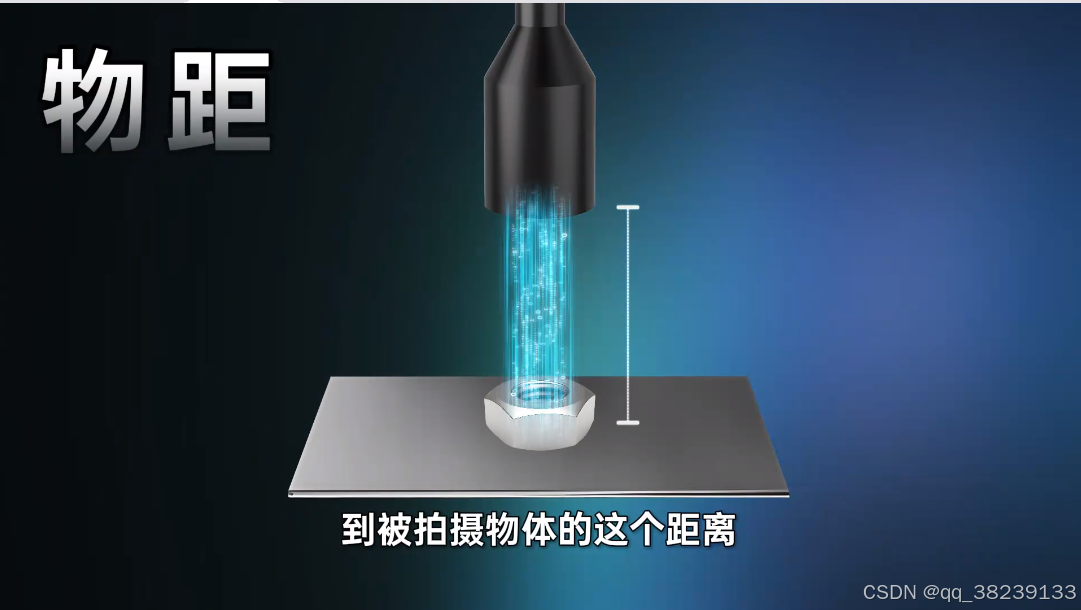
最低工作距离
低于标注的可能无法对焦,可以通过近摄接圈解决这个物体

镜头和相机的接口

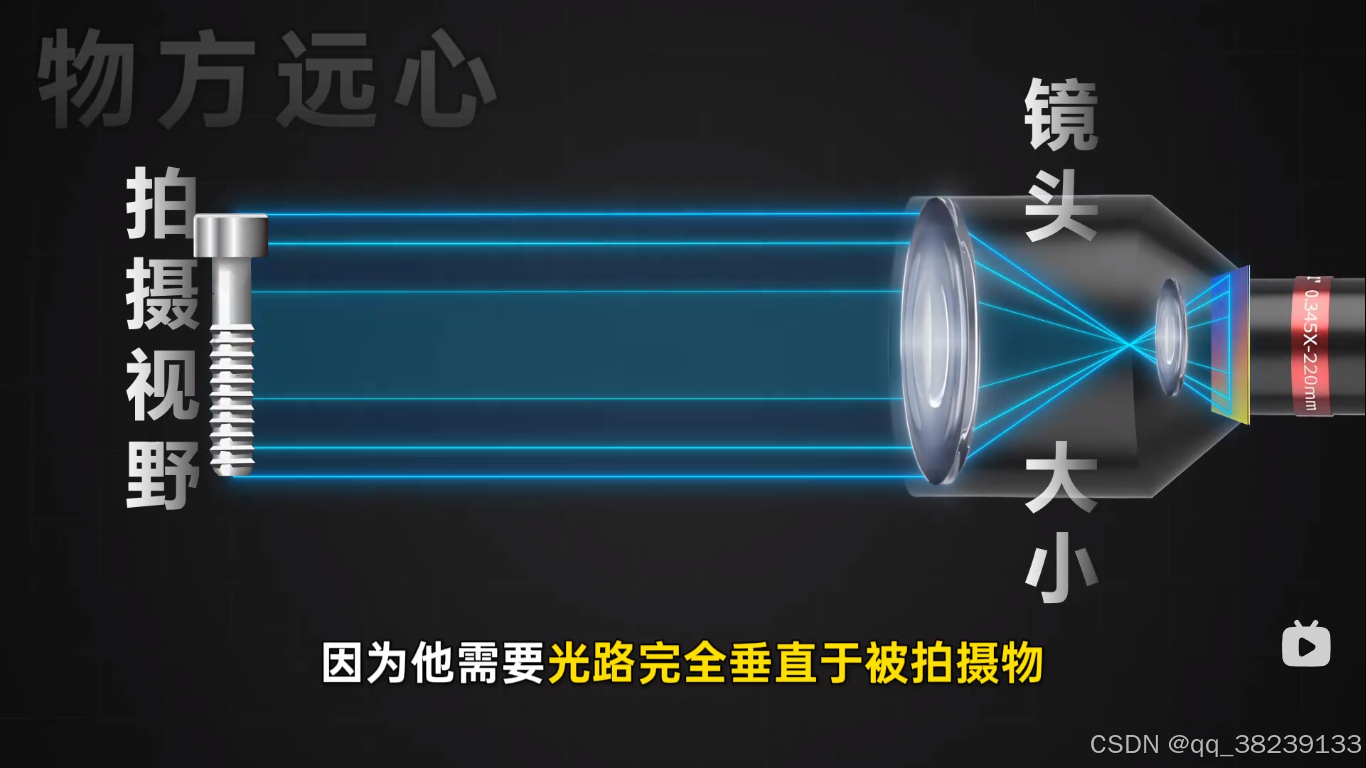
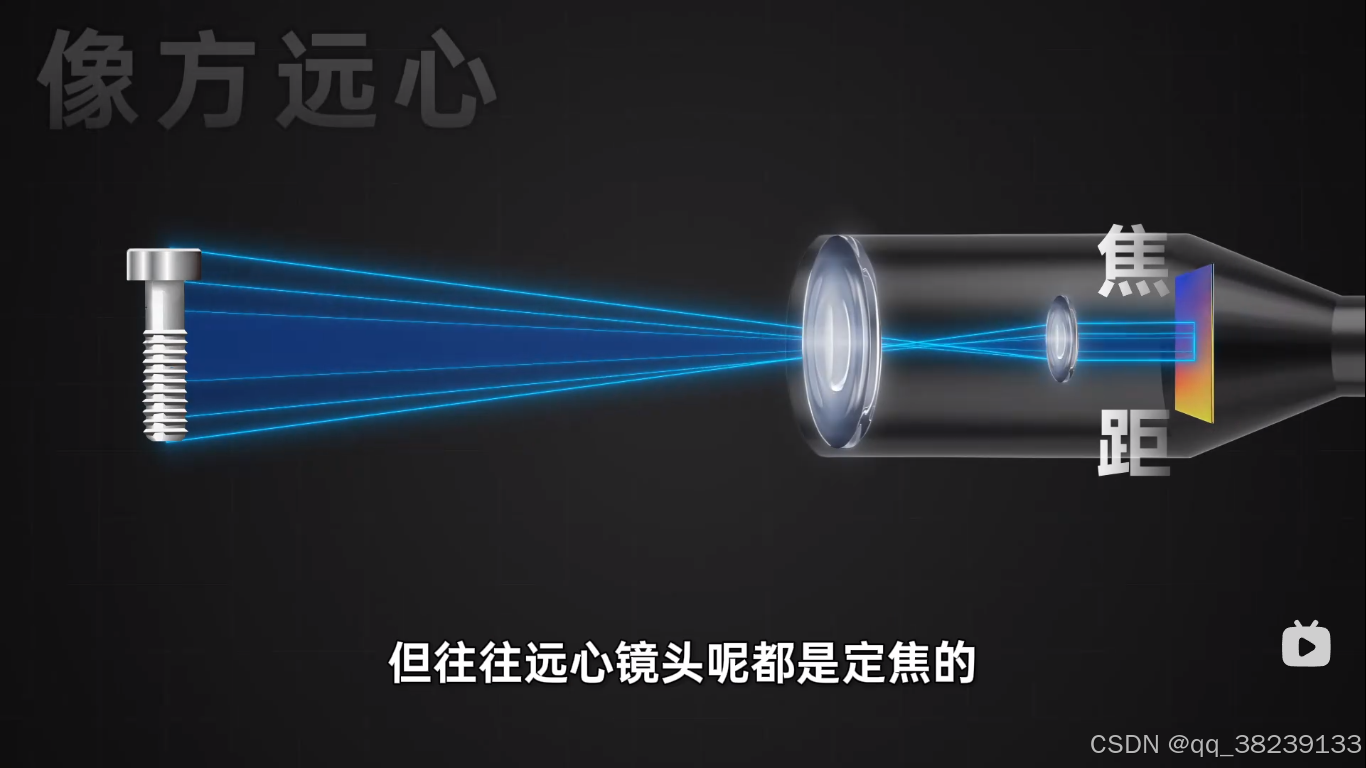
工业镜头选型(下)
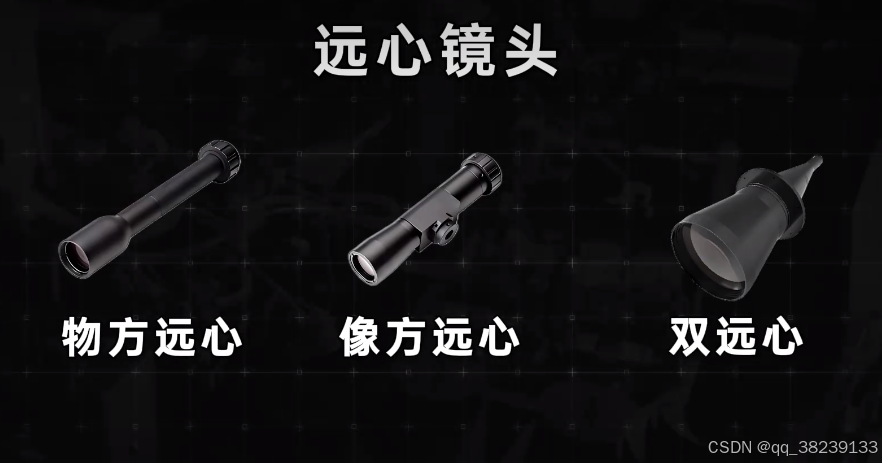
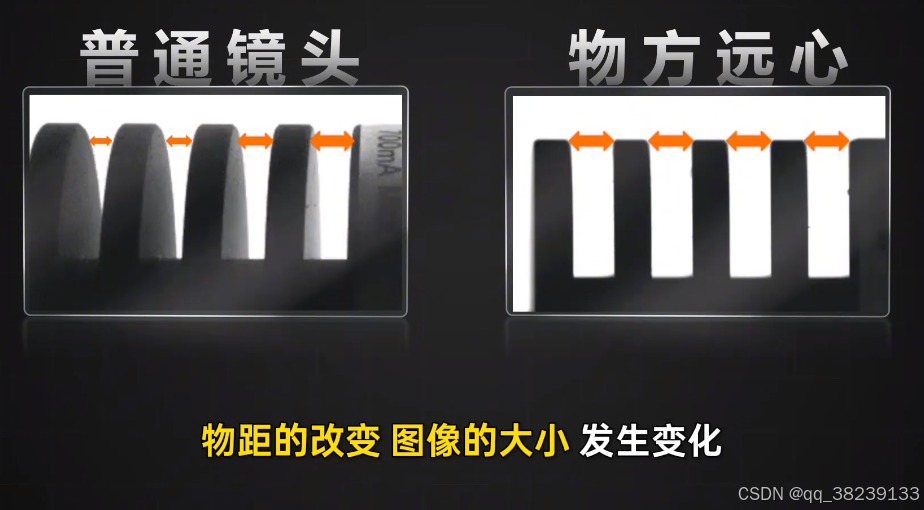
远心镜头,往往是定焦的,要选好告诉厂方要的出厂焦距
双远心镜头
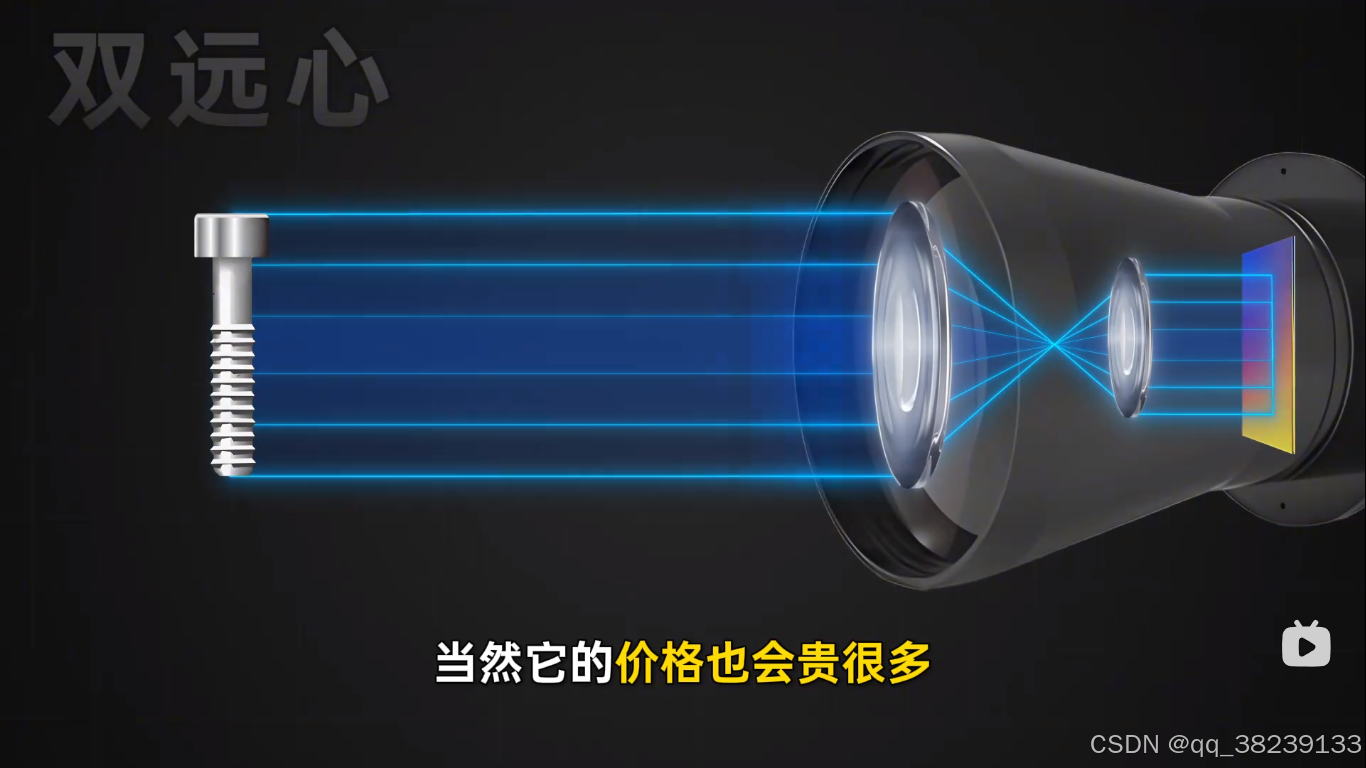
镜头靶面,大小大于等于相机的就好了
在远心中是固定值
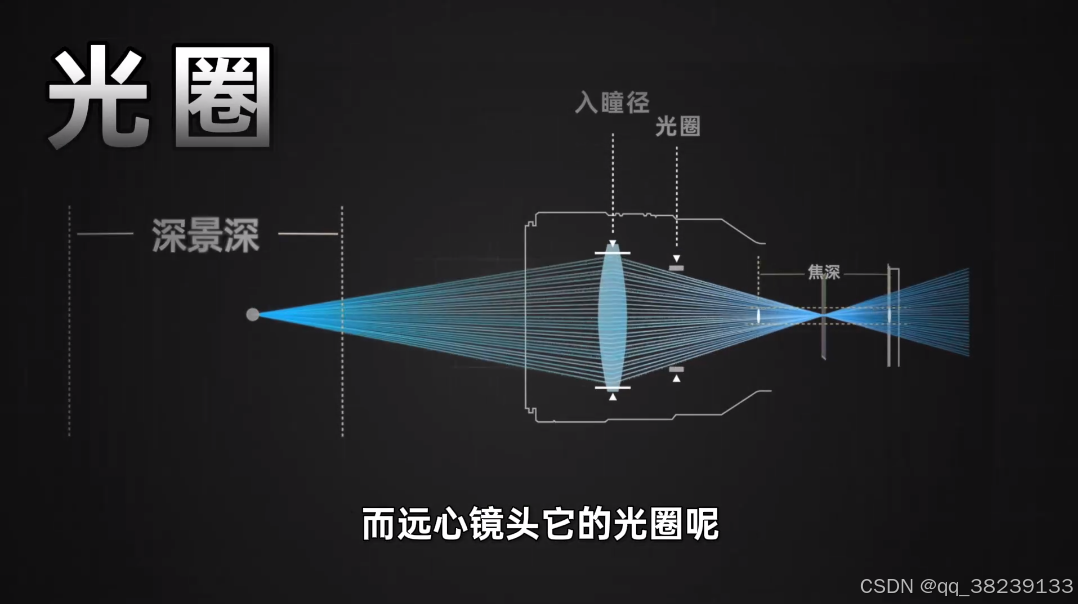
大多情况不支持光圈调整的
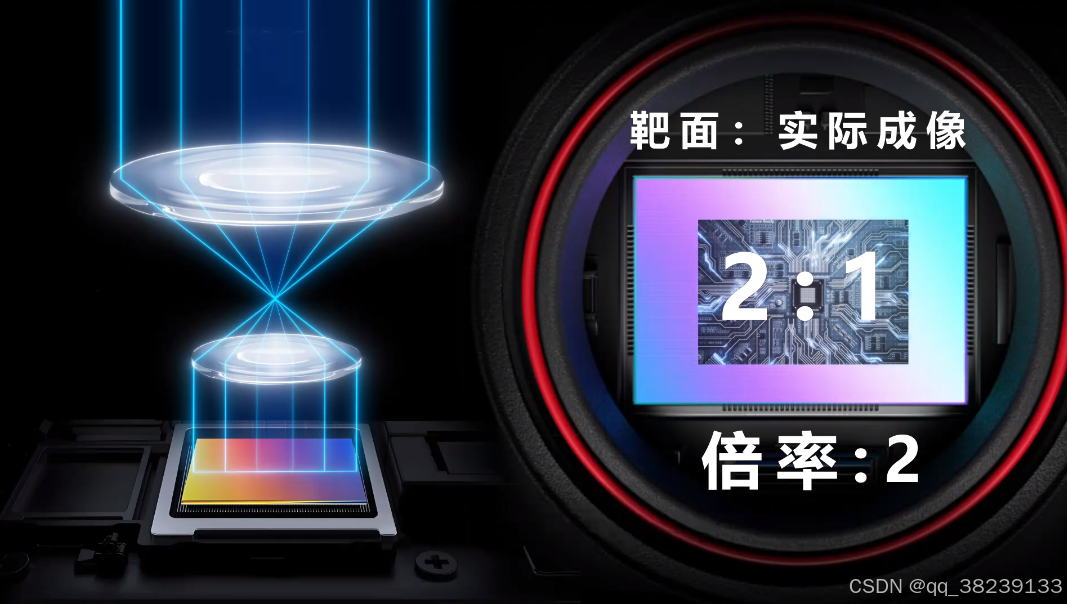
倍率, 实践成像大小/靶面大小