CAN总线机制
位级监视(bit monitoring)
位级监视(bit monitoring) :在 CAN 总线通信 中,在每一位发送时进行实时总线监控。
-
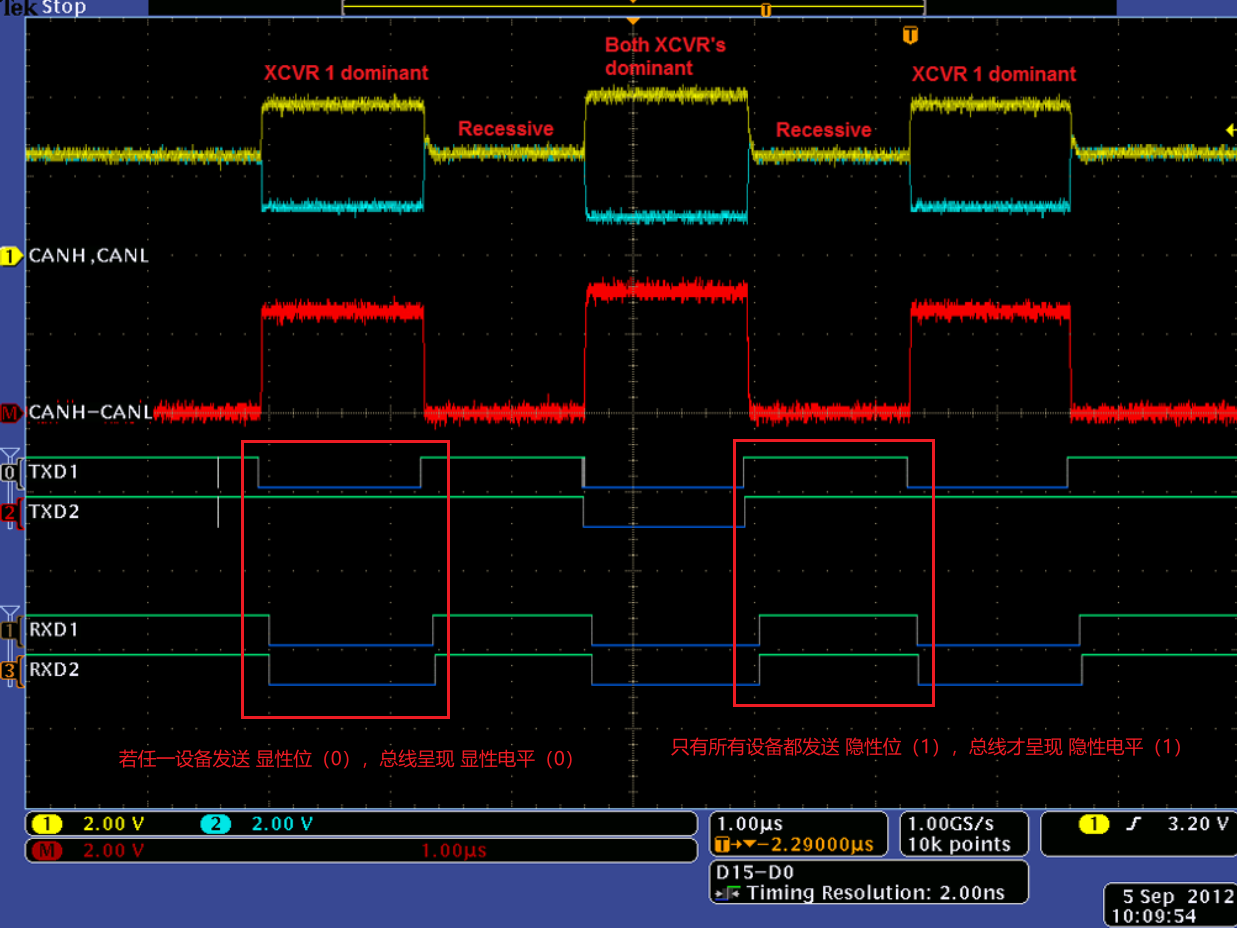
CAN 总线采用 "广播+总线监控" 的方式传输数据。在发送每一位的同时,发送器会实时监控总线上的电平,以确保:
- 自己发送的位和总线上的实际电平一致;
- 在多主节点争用总线(仲裁)时,能根据优先级判断输赢。 如果一个节点发送隐性位,但看到总线是显性位,说明有更高优先级的节点正在发送 ------ 此时必须停止发送(仲裁失败)。
线与特性(Wired-AND)
仲裁机制
一、先占先得规则(Bus Access Rule)
-
总线使用原则:
- 若当前有设备正在发送 数据帧 或 遥控帧 ,则其他设备 不能同时发送 数据帧或遥控帧。
- 其他设备可以发送 错误帧 或 过载帧 来中断当前通信(具有破坏性)。
-
总线空闲判断标准:
- 当检测到 连续11个隐性电平(逻辑1) 时,认为总线处于空闲状态。
- 只有在总线空闲时,设备才可以开始发送数据帧或遥控帧。
-
总线活跃状态下的行为:
- 一旦有设备开始发送数据帧/遥控帧,总线进入活跃状态。
- 活跃状态下不会出现连续11个隐性电平,因此其他设备不会尝试发送。
- 若其他设备在此期间有发送需求,则需等待总线变为空闲后才能尝试发送。
-
类比操作系统调度算法:
- 此机制类似于操作系统的 先来先服务(FCFS)调度算法,即谁先请求总线使用权,谁就优先获得发送权。
二、非破坏性仲裁机制(Non-destructive Arbitration)
当多个设备同时发起发送请求时,CAN总线通过以下机制进行仲裁:
-
仲裁依据:
- 根据 报文标识符(ID) 进行仲裁。
- ID号越小,优先级越高。
- 高优先级的设备赢得仲裁,继续发送;低优先级的设备停止发送,转为接收模式。
-
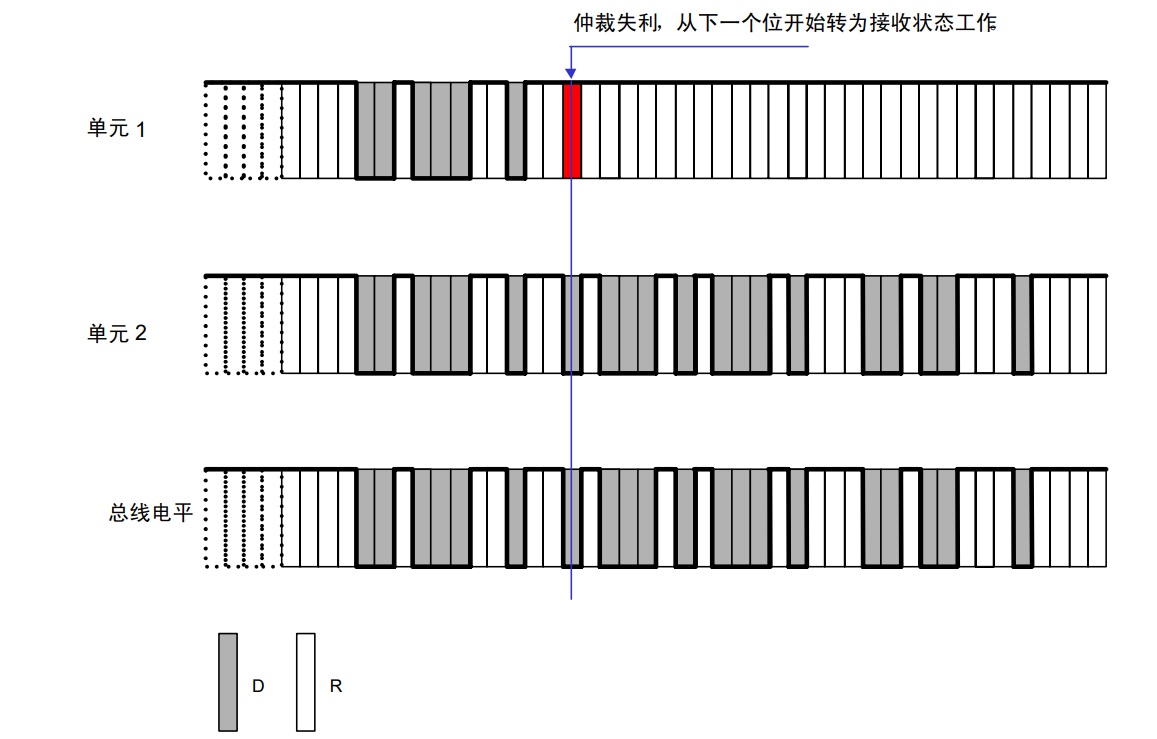
仲裁过程特点:
- 非破坏性:仲裁过程中不会损坏高优先级设备的数据帧。
- 所有参与仲裁的设备在发送仲裁段的同时监听总线电平。瑞萨电子的《CAN入门书》中给出了非破坏性仲裁的工作原理图: