教程
相机标定分类
相机标定分为内参标定和外参标定。
相机成像原理
相机成像畸变
四个坐标系的转变
内参标定
内参
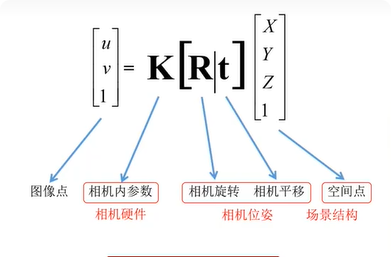
相机内参通常用一个 3×3 矩阵(内参矩阵,KK)表示,形式如下:

(1)焦距(Focal Length)
-
fx,fy:
-
表示相机在图像坐标系 x和 y 方向上的单位长度所对应的像素的大小(单位:像素)。
-
如果 fx=fy,说明像素是正方形的;若不相等(如 fx≠fy),则像素是矩形的(常见于某些工业相机)。
-
(2) 主点(Principal Point)
-
cx,cy:
-
图像坐标系中的光轴中心(即图像中心)的像素坐标。
-
理想情况下,主点位于图像的正中心(如 640×480 图像的主点为 (320,240)),但实际可能因镜头安装偏差存在微小偏移。
-