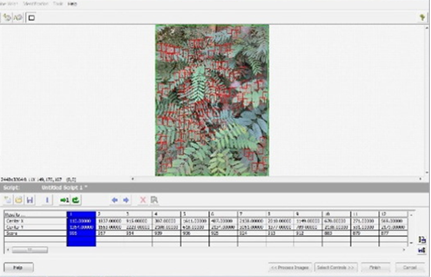
基于LabVIEW构建了一套集成机器视觉、智能决策与精准控制的农业杂草识别系统。通过高分辨率视觉传感器采集作物图像,利用 LabVIEW 的 NI Vision 模块实现图像颜色匹配与特征分析,结合 Arduino 兼容的工业级控制硬件,实现杂草定位与除草剂精准喷洒。
应用场景
-
适用环境:露天农田、智能温室、果园等规模化种植场景,支持单株作物精细化检测与行间杂草识别。
-
核心功能:实时图像采集→杂草颜色特征匹配→Arduino 驱动执行机构(喷雾器、移动平台)→精准除草作业。
硬件选型
| 硬件组件 | 品牌 / 型号 | 选型原因 |
|---|---|---|
| 工业相机 | Basler acA2000-50gm | 500 万像素全局快门,支持 USB3.0 高速传输,适应动态光照环境下的清晰成像。 |
| 镜头 | Computar M0814-MP2 | 8mm 定焦镜头,景深大,适合近距(30-100cm)植物叶片细节捕捉。 |
| 光源 | Ose 机器视觉环形光源 | 可调白光 LED 光源,消除阴影干扰,确保 RGB 颜色采集的一致性。 |
| 控制器 | Arduino Due | 32 位 ARM 核心,支持高速 IO 通信,兼容 LabVIEW Interface for Arduino(LIFA)插件。 |
| 执行机构 | Festo 气动喷雾阀 | 响应时间 < 20ms,雾化颗粒均匀,配合高精度滑台模组(THK KR20)实现 ±2mm 定位精度。 |
| 移动平台 | AGV 小车(MiR100) | 自主导航 AGV,支持 ROS 与 LabVIEW 通信,适应田间复杂路径规划。 |
优势组合:
-
Basler 相机 + Computar 镜头实现亚毫米级图像分辨率,满足叶片纹理与颜色的精准分析;
-
Festo 气动阀与 THK 滑台的高精度配合,确保除草剂喷洒范围误差 < 5cm;
-
MiR100 AGV 支持动态路径调整,提升多地块作业效率。
核心功能
-
图像预处理
-
使用 NI Vision Assistant 配置颜色采集参数,通过 RGB 阈值分割提取绿色像素(模板颜色匹配度 > 85%),替代传统二值化处理,保留更多颜色细节;
-
移除噪声滤波模块,避免误将病斑识别为健康区域,直接通过形态学开运算(膨胀 + 腐蚀)消除图像噪点。
-
杂草检测算法
-
-
颜色特征优先:以健康作物的 RGB 均值(如 R=50-80, G=150-200, B=30-60)构建模板,通过 NI IMAQ Match Pattern 函数实现像素级匹配,匹配分数 > 75% 判定为作物,<50% 判定为杂草;
-
形态学辅助验证:计算轮廓面积、长宽比(>2.5 判定为狭长草叶),排除土壤、枯叶等干扰。
-
硬件控制逻辑
-
-
通过 LIFA 库实现 LabVIEW 与 Arduino Due 的实时通信,传输数据包括:杂草坐标(X/Y)、喷雾触发信号、AGV 导航指令;
-
多线程设计:主线程处理图像分析,子线程同步控制 AGV 移动与喷雾阀,确保作业延迟 < 100ms。
-
(三)架构优势
| 对比维度 | 本方案(LabVIEW+Arduino) | 传统方案(Python + 树莓派) |
|---|---|---|
| 开发效率 | 图形化编程,50% 代码量减少,支持实时调试 | 需编写底层驱动,调试周期长 |
| 实时性 | 毫秒级图像处理(NI Vision 优化库) | 依赖 Python 解释器,延迟较高 |
| 硬件兼容性 | 内置 LIFA 库,即插即用 Arduino 生态硬件 | 需手动适配 GPIO,易出现通信延迟 |
| 工业级扩展 | 支持 NI CompactRIO 等实时控制器升级 | 限于树莓派性能,难以扩展复杂外设 |
| 算法部署 | 直接调用 NI 视觉函数,无需代码转换 | 需通过 C++ 重写算法,移植成本高 |
主要特点:
-
低代码高效开发:通过 LabVIEW 图形化界面快速搭建算法流程,非编程人员可通过 NI Vision Assistant 完成 90% 的参数配置;
-
硬实时性保障:利用 LabVIEW Real-Time 模块可升级至 FPGA 加速,满足无人机实时除草等对延迟敏感的场景;
-
生态整合能力:无缝对接 NI 数据采集卡、运动控制卡,支持从原型到工业量产的平滑过渡。
主要问题
(一)关键问题 1 :光照变化导致颜色漂移
-
现象:不同时段光照(如正午强光 / 傍晚弱光)导致作物 RGB 值波动,误将健康叶片判定为杂草。
-
解决方案:
-
引入自动白平衡(AWB)算法:通过 NI IMAQ Set White Balance 函数,利用标准白板实时校准相机色彩;
-
动态阈值调整:建立光照强度 - 阈值补偿模型,根据环境光传感器数据(连接 Arduino)自动调整 RGB 匹配范围。
-
(二)关键问题 2 :复杂背景下杂草分割困难
-
现象:作物与杂草叶片颜色相近(如玉米与狗尾草均为绿色),单纯颜色匹配误检率高。
-
解决方案:
-
融合纹理特征:新增灰度共生矩阵(GLCM)分析,提取对比度、熵值等纹理参数,通过 LabVIEW Statistics 与 Machine Learning 模块训练 SVM 分类器;
-
区域生长算法:以颜色匹配结果为种子点,基于像素相似度扩展 ROI,排除孤立噪声点。
-
(三)关键问题 3 :多设备同步控制延迟
-
现象:AGV 移动与喷雾阀触发不同步,导致除草剂喷洒位置偏移。
-
解决方案:
-
采用时间触发机制:在 LabVIEW 中创建定时循环(10ms 周期),同步更新 AGV 位置数据与喷雾逻辑;
-
硬件握手信号:Arduino 通过硬件中断引脚(D2/D3)接收 LabVIEW 的触发信号,确保控制指令优先级高于常规串口通信。
-
LabVIEW 特色
-
视觉算法快速验证:通过 NI Vision Assistant 交互式调参,10 分钟内完成颜色模板创建与匹配策略优化,较 Python OpenCV 节省 50% 开发时间;
-
多域系统集成:同一平台实现图像处理(NI Vision)、逻辑控制(LabVIEW FPGA)、数据记录(TDMS 格式),避免跨软件协同的兼容性问题;
-
工业级部署能力:支持编译为独立可执行程序(EXE),运行于无 LabVIEW 环境的工业 PC,配合 NICompactRIO 实现无风扇嵌入式系统部署。
本方案通过 LabVIEW 的图形化开发优势与 NI 硬件生态整合能力,构建了一套高鲁棒性、易扩展的智能除草系统。相较于传统方案,其核心竞争力在于低代码开发效率 、硬实时控制能力 与工业级硬件兼容性,尤其适合农业自动化领域对快速原型开发与可靠部署的双重需求。