相机与激光雷达联合标定:如何选择高辨识度的参照物
-
- 一、背景
- 二、结论
- 三、材料反射特性对比
-
- [1. 梳妆镜(镜面反射)------ 效果极差](#1. 梳妆镜(镜面反射)—— 效果极差)
- [2. 白色墙面(漫反射)------ 效果一般](#2. 白色墙面(漫反射)—— 效果一般)
- [3. 反光车牌/交通锥条纹(回归反射)------ 效果极佳](#3. 反光车牌/交通锥条纹(回归反射)—— 效果极佳)
- 四、实践操作建议
- 总结
在自动驾驶、机器人与三维感知领域,相机与激光雷达是两种互补的核心传感器。联合标定的目标是获取两者之间的精确坐标变换关系,使来自不同传感器的数据能在同一坐标系下对齐,从而完成深度融合与感知任务。
一、背景
在实际项目中,我们曾尝试多种标定方法,但效果均不理想:
- 初始尝试:使用 Apollo 框架自带的相机外参标定工具,结果不稳定,难以满足精度要求。
- 二次尝试:采用 SensorsCalibration 中的 lidar2camera 标定模块,但需要手动调节大量参数,调试过程繁琐且易出错。
- 手动选点法 :作为补充,我们在图像和点云中手动选取若干对应特征点 ,通过数学计算直接求解变换矩阵。这种方法简单直接,但选点的准确性直接决定了标定精度。
于是问题来了:什么样的物体适合作为手动标定的参照点?
我们先后尝试了以下材料:
- 梳妆镜(镜面反射):效果最差,几乎无法在点云中形成稳定特征,但零成本。
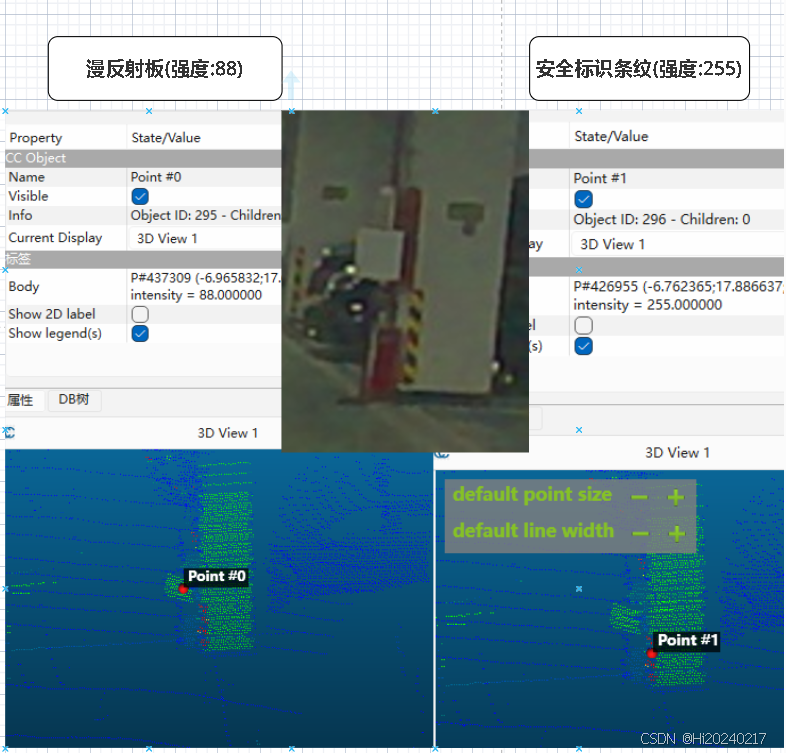
- 采购的漫反射板:效果有所提升,但仍不够理想,且增加了采购成本。
- 车牌与带反光条纹的交通锥 :意外发现它们在点云中极为显眼,特征稳定且易于选取,成为理想参照物。
这一发现促使我们进一步研究:为什么不同材料在激光雷达点云中的表现差异如此之大?
二、结论
经过对不同材料反射特性的分析与实测对比,建议:
选用由回归反射材料制成的安全标识作为标定参照物,例如黄黑警示胶带、红白相间的交通锥条纹、反光车牌等。
这类材料在点云中会形成异常明亮、稳定且易提取的点簇,极大提升了选点的准确性与标定的鲁棒性。

三、材料反射特性对比
激光雷达通过发射激光脉冲并接收其回波来测距和绘制点云。物体表面的反射特性直接决定了回波信号的强弱,从而影响其在点云中的"可见度"。
1. 梳妆镜(镜面反射)------ 效果极差
- 原理:镜面表面极其光滑,反射遵循"入射角等于反射角"的定律。反射光能量集中,方向性强。
- 结果 :只有当激光束近乎垂直入射时,反射光才能原路返回被雷达接收。入射角度稍大,反射光就会完全"跑偏",雷达接收不到信号。
- 点云表现 :在绝大多数角度下,镜面在点云中呈现为一片空洞或只有零星、微弱的点 ,特征极不稳定,完全不适合作为标定参照物。
2. 白色墙面(漫反射)------ 效果一般
- 原理 :表面微观结构粗糙,入射光会被向半球空间的所有方向散射,能量分布均匀。
- 结果:无论激光从何角度射来,总有一部分散射光能返回雷达。回波强度随入射角增大而减弱,但不会归零。
- 点云表现 :能形成一片强度中等、连续且稳定的点云表面。虽然可用,但特征不够"突出",在复杂场景中不易精确选取特定点。
3. 反光车牌/交通锥条纹(回归反射)------ 效果极佳
- 原理 :表面覆有特殊的微棱镜结构 或高折射率玻璃微珠 。这种结构能将入射光在内部进行多次反射,最终精准地沿原入射方向平行反射回去。
- 结果 :在一个很大的入射角范围内(通常可达±40°以上),绝大部分光能都能被"导回"雷达接收器,能量返回效率远超漫反射材料。
- 点云表现 :在点云中呈现为一小簇强度值极高的亮点 ,像"灯塔"一样明显区别于周围环境。特征极其稳定、鲁棒,易于自动或手动精确提取,是标定的理想选择。
为了更直观地理解上述过程,可以参考下面的激光反射原理流程图:
是
否
激光脉冲射向物体
物体表面反射类型?
镜面反射
反射光定向射出
入射角是否垂直?
雷达可收到强回波
反射光完全丢失
点云中为空洞
漫反射-如白色墙面
光线向所有方向散射
雷达总能收到部分能量
形成强度中等
的连续表面
回归反射-如反光车牌
光线被精密导引
沿原路返回
雷达收到绝大部分能量
形成异常明亮的
孤立点簇
四、实践操作建议
理解了原理后,在实际的相机-激光雷达联合标定中,你可以遵循以下步骤:
- 制作标定物 :购买或自制带有回归反射材料的标定板或标志物。例如,在硬纸板上粘贴红白相间的反光胶带,形成清晰的角点或图案。
- 布置场景:在相机和激光雷达的共同视野内,将标定物置于多个不同的位置和角度。确保标定物在图像和点云中均清晰可见。
- 数据采集:同步采集包含标定物的相机图像和激光雷达点云数据。
- 特征点选取 :
- 在图像中:选取标定物上易于识别的角点或图案中心。
- 在点云中 :轻松找到对应区域那簇最亮的点,选取其中心或特征角点。
- 计算变换矩阵:利用多组匹配好的图像-点云特征点对,通过求解 PnP 或 SVD 等算法,计算出从激光雷达坐标系到相机坐标系的旋转和平移矩阵(外参)。
核心优势 :使用回归反射材料,能让你在点云中快速、精准、无歧义地找到与图像对应的点,从而大幅提升标定流程的效率和最终结果的精度。
总结
相机与激光雷达的联合标定是多传感器融合的基石。选择正确的参照物是迈向高精度标定的关键一步。放弃不稳定的镜面和特征平淡的漫反射面,转向利用回归反射材料的"主动增亮"特性,能让你的标定工作事半功倍。这一小小的材料选择背后,是光学原理与实际工程智慧的巧妙结合。