文章目录
一、问题描述
已知:
m i n ( x 1 − 1 ) 2 + ( x 2 − 2 ) 2 s . t . 0 ⩽ x 1 ⩽ 1.5 , 1 ⩽ x 2 ⩽ 2.5 min(x_1-1)^2+(x_2-2)^2 \qquad s.t. \ \ 0 \leqslant x_1 \leqslant 1.5,\ \ 1 \leqslant x_2 \leqslant 2.5 min(x1−1)2+(x2−2)2s.t. 0⩽x1⩽1.5, 1⩽x2⩽2.5
目标函数为二元二次函数,可行域为线性、凸集,此为二次规划问题,可将其转换成二次规划表达式再进行求解。相关数学概念参考另一篇: 最优化问题基础理论概述。
二、数学推导
1. 目标函数处理
f ( x 1 , x 2 ) = ( x 1 − 1 ) 2 + ( x 2 − 2 ) 2 = x 1 2 + x 2 2 − 2 x 1 − 4 x 2 + C f(x_1, x_2)=(x_1-1)^2+(x_2-2)^2 =x_1^2+x_2^2-2x_1-4x_2+C f(x1,x2)=(x1−1)2+(x2−2)2=x12+x22−2x1−4x2+C
其中,常数项用 C C C表示;
令, X = x 1 x 2 X=\left \\begin{matrix} x_1 \\\\ x_2 \\end{matrix} \\right X=x1x2,则
f ( x 1 , x 2 ) = x 1 , x 2 x 1 , x 2 T + − 2 , − 4 x 1 , x 2 T = X T X + − 2 , − 4 X = 1 2 X T 2 0 0 2 X + − 2 − 4 T X = 1 2 X T P X + Q T X \begin{aligned} f(x_1, x_2) &= x_1, x_2x_1, x_2^T+-2, -4x_1, x_2^T \\2ex &= X^TX+-2, -4X \\2ex &=\frac{1}{2} X^T \left\\begin{matrix} 2 \&0 \\\\ 0\&2 \\end{matrix} \\right X+\left\\begin{matrix} -2 \\\\ -4 \\end{matrix} \\right^TX \\2ex &= \frac{1}{2} X^TPX+Q^TX \end{aligned} f(x1,x2)=x1,x2x1,x2T+−2,−4x1,x2T=XTX+−2,−4X=21XT2002X+−2−4TX=21XTPX+QTX
其中, P = 2 0 0 2 , Q = − 2 − 4 P=\left\\begin{matrix} 2 \&0 \\\\ 0\&2 \\end{matrix} \\right,\ Q=\left\\begin{matrix} -2 \\\\ -4 \\end{matrix} \\right P=2002, Q=−2−4
关于为什么要写成 1 2 X T P X \frac{1}{2} X^TPX 21XTPX 形式,因为此时 P P P 为目标函数的海塞矩阵 ,具体参看 此链接。
2. 约束条件处理
{ 0 ⩽ x 1 ⩽ 1.5 1 ⩽ x 2 ⩽ 2.5 ⟺ 0 1 ⩽ x 1 x 2 ⩽ 1.5 2.5 ⟺ 0 1 ⩽ 1 0 0 1 X ⩽ 1.5 2.5 \begin{aligned} \left\{ \begin{array}{} 0 \leqslant x_1 \leqslant 1.5 \\ 1 \leqslant x_2 \leqslant 2.5 \\ \end{array} \right . \quad \Longleftrightarrow \quad \left\\begin{matrix}0 \\\\1\\end{matrix} \\right \leqslant \left\\begin{matrix}x_1 \\\\x_2\\end{matrix} \\right \leqslant \left\\begin{matrix}1.5 \\\\2.5\\end{matrix} \\right \quad \Longleftrightarrow \quad \left\\begin{matrix}0 \\\\1\\end{matrix} \\right \leqslant \left\\begin{matrix}1\&0 \\\\0\&1\\end{matrix} \\rightX \leqslant \left\\begin{matrix}1.5 \\\\2.5\\end{matrix} \\right \end{aligned} {0⩽x1⩽1.51⩽x2⩽2.5⟺01⩽x1x2⩽1.52.5⟺01⩽1001X⩽1.52.5
令 L B = 0 1 , A = 1 0 0 1 , U B = 1.5 2.5 L_B=\left\\begin{matrix}0 \\\\1\\end{matrix} \\right,\ A=\left\\begin{matrix}1\&0 \\\\0\&1\\end{matrix} \\right,\ U_B=\left\\begin{matrix}1.5 \\\\2.5\\end{matrix} \\right LB=01, A=1001, UB=1.52.5 ,整理得约束条件如下:
L B ⩽ A X ⩽ U B L_B \leqslant AX \leqslant U_B LB⩽AX⩽UB
三、代码编写
由步骤 二、数学推导 得到5个矩阵:
- P P P : 二次型矩阵(实对称矩阵);
- Q Q Q : 一次项矩阵;
- U B U_B UB : 上边界矩阵;
- L B L_B LB : 下边界矩阵;
- A A A : 边界系数矩阵;
现在根据这5个矩阵进行代码编写,是使用osqp进行二次型规划问题构建及求解。
代码如下:
cpp
Eigen::SparseMatrix<double> P(2, 2); // P, 二次型矩阵
Eigen::VectorXd Q(2); // Q, 一次项向量
Eigen::SparseMatrix<double> A(2, 2); // 单位阵
Eigen::VectorXd lowerBound(2); // 下边界向量
Eigen::VectorXd upperBound(2); // 上边界向量
P.insert(0, 0) = 2.0;
P.insert(1, 1) = 2.0;
std::cout << "\033[34m" << "P:" << std::endl
<< P << "\033[0m" << std::endl;
A.insert(0, 0) = 1.0;
A.insert(1, 1) = 1.0;
std::cout << "\033[34m" << "A:" << std::endl
<< A << "\033[0m" << std::endl;
Q << -2, -4;
std::cout << "\033[34m" << "Q:" << std::endl
<< Q << "\033[0m" << std::endl;
lowerBound << 0.0, 1.0;
upperBound << 1.5, 2.5;
// Step 1: 创建求解器
OsqpEigen::Solver solver;
// Step 2: 设置(提升求解速度)
solver.settings()->setVerbosity(false);
solver.settings()->setWarmStart(true);
// Step 3: 初始化(7部分)
solver.data()->setNumberOfVariables(2); // 变量数
solver.data()->setNumberOfConstraints(2); // 约束数
if (!solver.data()->setHessianMatrix(P)) // 海塞矩阵
{
return;
}
if (!solver.data()->setGradient(Q)) // Q矩阵
{
return;
}
if (!solver.data()->setLinearConstraintsMatrix(A)) // 线性约束矩阵A
{
return;
}
if (!solver.data()->setLowerBound(lowerBound)) // 下边界矩阵
{
return;
}
if (!solver.data()->setUpperBound(upperBound)) // 上边界矩阵
{
return;
}
if (!solver.initSolver())
{
return;
}
// Step 4:求解
Eigen::VectorXd QPSolution;
if (solver.solveProblem() != OsqpEigen::ErrorExitFlag::NoError)
{
return;
}
QPSolution = solver.getSolution();
std::cout << "\033[1;32m" << "QPSolution:" << std::endl
<< QPSolution << "\033[0m" << std::endl;运行结果如下:
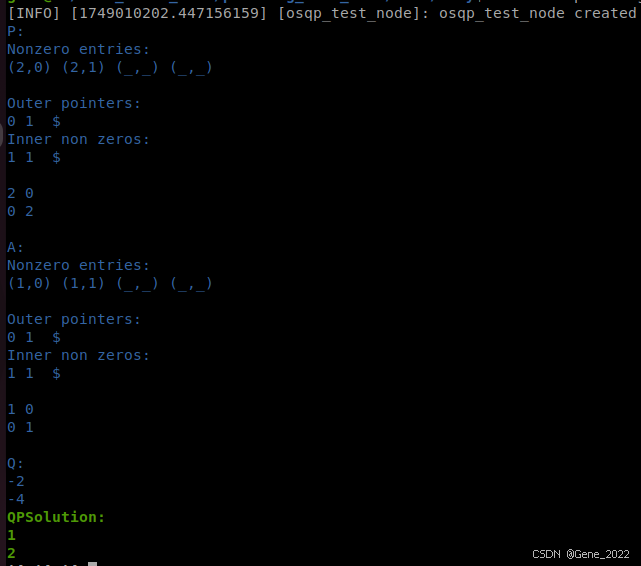
可见,当 x 1 = 1 , x 2 = 2 x_1=1,\ x_2=2 x1=1, x2=2 时目标函数取得最小。