|--------------------------------------------------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|--------|
| 配置项 | 解释 | 备注 |
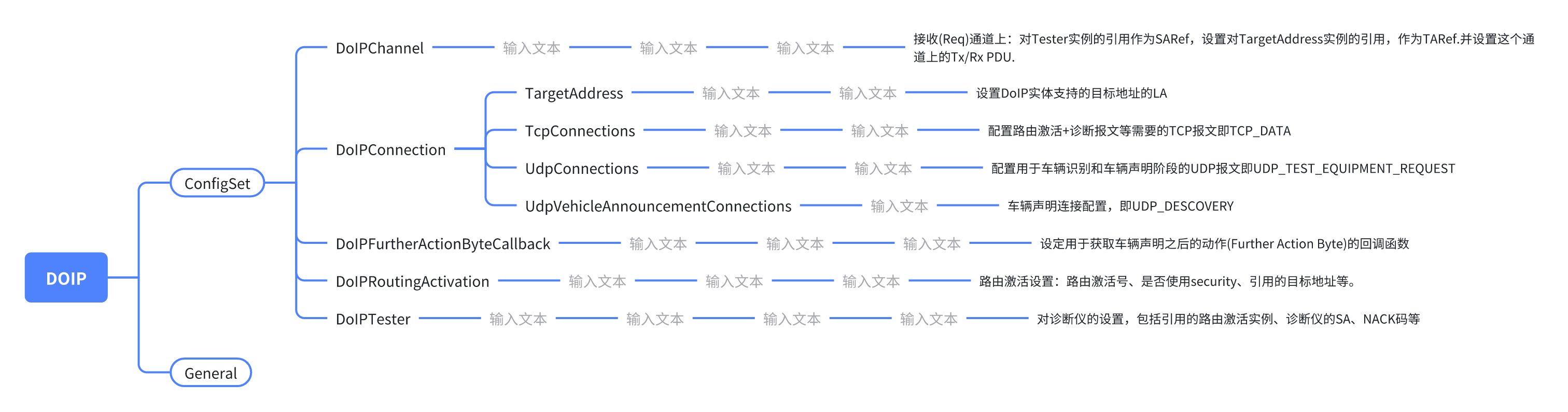
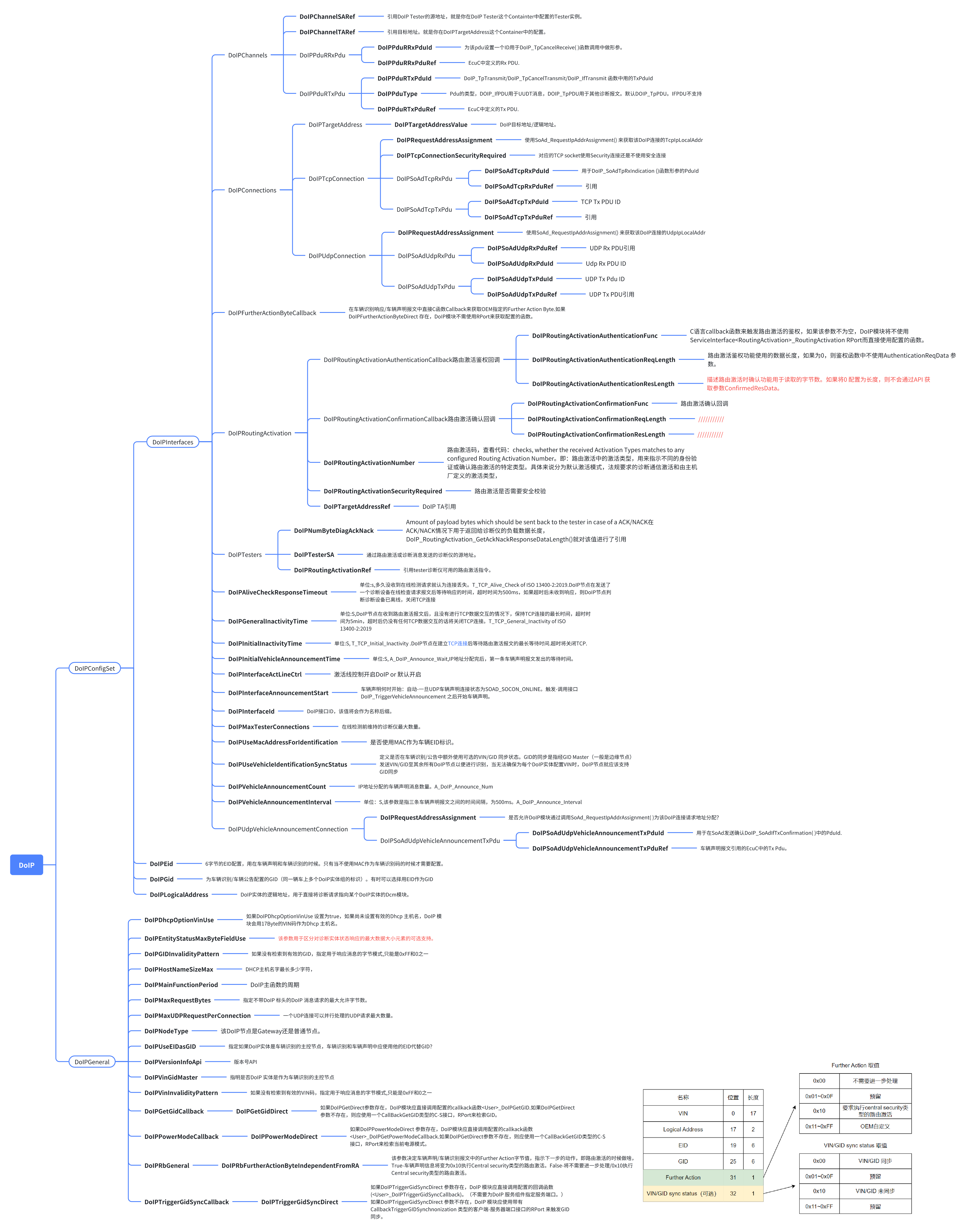
| DoIPChannelSARef | 引用DoIP Tester的源地址,就是你在DoIP Tester这个Containter中配置的Tester实例。 | |
| DoIPChannelTARef | 引用目标地址。就是你在DoIPTargetAddress这个Container中的配置。 | |
| DoIPPduRRxPduId | 为该pdu设置一个ID用于DoIP_TpCancelReceive( )函数调用中做形参。 | |
| DoIPPduRRxPduRef | EcuC中定义的Rx PDU. | |
| DoIPPduRTxPduId | DoIP_TpTransmit/DoIP_TpCancelTransmit/DoIP_IfTransmit 函数中用的TxPduId | |
| DoIPPduType | Pdu的类型,DOIP_IfPDU用于UUDT消息,DOIP_TpPDU用于其他诊断报文。默认DOIP_TpPDU。IFPDU不支持 | |
| DoIPPduRTxPduRef | EcuC中定义的Tx PDU. | |
| DoIPTargetAddressValue | DoIP目标地址/逻辑地址。 | |
| DoIPRequestAddressAssignment | 使用SoAd_RequestIpAddrAssignment() 来获取该DoIP连接的TcpIpLocalAddr | |
| DoIPTcpConnectionSecurityRequired | 对应的TCP socket使用Security连接还是不使用安全连接 | |
| DoIPSoAdTcpRxPduId | 用于DoIP_SoAdTpRxIndication ()函数形参的PduId | |
| DoIPSoAdTcpRxPduRef | 引用,来自SoAd中配好的Pdu | |
| DoIPSoAdTcpTxPduId | TCP Tx PDU ID | |
| DoIPSoAdTcpTxPduRef | 引用,来自SoAd中配好的Pdu | |
| DoIPRequestAddressAssignment | 使用SoAd_RequestIpAddrAssignment() 来获取该DoIP连接的UdpIpLocalAddr | |
| DoIPSoAdUdpRxPduRef | UDP Rx PDU引用 | |
| DoIPSoAdUdpRxPduId | Udp Rx PDU ID | |
| DoIPSoAdUdpTxPduId | UDP Tx Pdu ID | |
| DoIPSoAdUdpTxPduRef | UDP Tx PDU引用 | |
| DoIPFurtherActionByteCallback | 在车辆识别响应/车辆声明报文中直接C函数Callback来获取OEM指定的Further Action Byte.如果DoIPFurtherActionByteDirect 存在,DoIP模块不需使用RPort来获取配置的函数。 | |
| DoIPRoutingActivationAuthenticationFunc | C语言callback函数来触发路由激活的鉴权,如果该参数不为空,DoIP模块将不使用ServiceInterface_RoutingActivation RPort而直接使用配置的函数。 | |
| DoIPRoutingActivationAuthenticationReqLength | 路由激活鉴权功能使用的数据长度,如果为0,则鉴权函数中不使用AuthenticationReqData 参数。 | |
| DoIPRoutingActivationAuthenticationResLength | 描述路由激活时确认功能用于读取的字节数。如果将0 配置为长度,则不会通过API 获 取参数ConfirmedResData。 | |
| DoIPRoutingActivationConfirmationFunc | 路由激活确认回调 | |
| DoIPRoutingActivationNumber | 路由激活码,查看代码:checks, whether the received Activation Types matches to any configured Routing Activation Number。即:路由激活中的激活类型,用来指示不同的身份验证或确认路由激活的特定类型。具体来说分为默认激活模式,法规要求的诊断通信激活和由主机厂定义的激活类型, | |
| DoIPRoutingActivationSecurityRequired | 路由激活是否需要安全校验 | |
| DoIPTargetAddressRef | DoIP TA引用 | |
| DoIPNumByteDiagAckNack | Amount of payload bytes which should be sent back to the tester in case of a ACK/NACK在ACK/NACK情况下用于返回给诊断仪的负载数据长度,DoIP_RoutingActivation_GetAckNackResponseDataLength()就对该值进行了引用 | |
| DoIPTesterSA | 通过路由激活或诊断消息发送的诊断仪的源地址 | |
| DoIPRoutingActivationRef | 引用tester诊断仪可用的路由激活指令。 | |
| DoIPAliveCheckResponseTimeout | 单位:s,多久没收到在线检测请求就认为连接丢失。T_TCP_Alive_Check of ISO 13400-2:2019.DoIP节点在发送了一个诊断设备在线检查请求报文后等待响应的时间,超时时间为500ms,如果超时后未收到响应,则DoIP节点判断诊断设备已离线,关闭TCP连接 | |
| DoIPGeneralInactivityTime | 单位:S,DoIP节点在收到路由激活报文后,且没有进行TCP数据交互的情况下,保持TCP连接的最长时间,超时时间为5min,超时后仍没有任何TCP数据交互的话将关闭TCP连接。T_TCP_General_Inactivity of ISO 13400-2:2019 | |
| DoIPInitialInactivityTime | 单位:S, T_TCP_Initial_Inactivity .DoIP节点在建立TCP连接后等待路由激活报文的最长等待时间.超时将关闭TCP. | |
| DoIPInitialVehicleAnnouncementTime | 单位:S, A_DoIP_Announce_Wait,IP地址分配完后,第一条车辆声明报文发出的等待时间。 | |
| DoIPInterfaceActLineCtrl | 激活线控制开启DoIP or 默认开启 | |
| DoIPInterfaceAnnouncementStart | 车辆声明何时开始:自动-一旦UDP车辆声明连接状态为SOAD_SOCON_ONLINE。触发-调用接口DoIP_TriggerVehicleAnnouncement 之后开始车辆声明。 | |
| DoIPInterfaceId | DoIP接口ID,该值将会作为名称后缀。 | |
| DoIPMaxTesterConnections | 在线检测前维持的诊断仪最大数量 | |
| DoIPUseMacAddressForIdentification | 是否使用MAC作为车辆EID标识。 | |
| DoIPUseVehicleIdentificationSyncStatus | 定义是否在车辆识别/公告中额外使用可选的VIN/GID 同步状态。GID的同步是指经GID Master(一般是边缘节点)发送VIN/GID至其余所有DoIP节点以便进行识别,当无法确保为每个DoIP实体配置VIN时,DoIP节点就应该支持GID同步 | |
| DoIPVehicleAnnouncementCount | IP地址分配的车辆声明消息数量。A_DoIP_Announce_Num | |
| DoIPVehicleAnnouncementInterval | 单位:S,该参数是指三条车辆声明报文之间的时间间隔,为500ms。A_DoIP_Announce_Interval | |
| DoIPRequestAddressAssignment | 是否允许DoIP模块通过调用SoAd_RequestIpAddrAssignment( )为该DoIP连接请求地址分配? | |
| DoIPSoAdUdpVehicleAnnouncementTxPduId | 用于在SoAd发送确认DoIP_SoAdIfTxConfirmation( )中的PduId. | |
| DoIPSoAdUdpVehicleAnnouncementTxPduRef | 车辆声明报文引用的EcuC中的Tx Pdu。 | |
| DoIPEid | 6字节的EID配置,用在车辆声明和车辆识别的时候。只有当不使用MAC作为车辆识别码的时候才需要配置。 | |
| DoIPGid | 为车辆识别/车辆公告配置的GID(同一辆车上多个DoIP实体组的标识)。有时可以选择用EID作为GID | |
| DoIPLogicalAddress | DoIP实体的逻辑地址,用于直接将诊断请求指向某个DoIP实体的Dcm模块。 | |
| DoIPDhcpOptionVinUse | 如果DoIPDhcpOptionVinUse 设置为true,如果尚未设置有效的Dhcp 主机名,DoIP 模 块会用17Byte的VIN码作为Dhcp 主机名。 | |
| DoIPEntityStatusMaxByteFieldUse | 该参数用于区分对诊断实体状态响应的最大数据大小元素的可选支持。 | |
| DoIPGIDInvalidityPattern | 如果没有检索到有效的GID,指定用于响应消息的字节模式,只能是0xFF和0之一 | |
| DoIPHostNameSizeMax | DHCP主机名字最长多少字符, | |
| DoIPMainFunctionPeriod | DoIP主函数的周期 | |
| DoIPMaxRequestBytes | 指定不带DoIP 标头的DoIP 消息请求的最大允许字节数。 | |
| DoIPMaxUDPRequestPerConnection | 一个UDP连接可以并行处理的UDP请求最大数量。 | |
| DoIPNodeType | 该DoIP节点是Gateway还是普通节点。 | |
| DoIPUseEIDasGID | 指定如果DoIP实体是车辆识别的主控节点,车辆识别和车辆声明中应使用他的EID代替GID | |
| DoIPVersionInfoApi | 版本号API,实测CAR12.2只能支持3,即2019版 | |
| DoIPVinGidMaster | 指明是否DoIP 实体是作为车辆识别的主控节点 | |
| DoIPVinInvalidityPattern | 如果没有检索到有效的VIN码,指定用于响应消息的字节模式,只能是0xFF和0之一 | |
| DoIPGetGidDirect | 如果DoIPGetDirect参数存在,DoIP模块应直接调用配置的callkack函数_DoIPGetGID.如果DoIPGetDirect参数不存在,则应使用一个CallBackGetGID类型的C-S接口,RPort来检索GID。 | |
| DoIPPowerModeDirect | 如果DoIPPowerModeDirect 参数存在,DoIP模块应直接调用配置的callkack函数_DoIPGetPowerModeCallback.如果DoIPGetDirect参数不存在,则应使用一个CallBackGetGID类型的C-S接口,RPort来检索当前电源模式。 | |
| DoIPRbFurtherActionByteIndependentFromRA | 该参数决定车辆声明/车辆识别报文中的Further Action字节值,指示下一步的动作,即路由激活的时候做啥,True-车辆声明信息将变为0x10执行Central security类型的路由激活。False-将不需要进一步处理/0x10执行Central security类型的路由激活。 | |
| DoIPTriggerGidSyncDirect | 如果DoIPTriggerGidSyncDirect 参数存在,DoIP 模块应直接调用配置的回调函数 (_DoIPTriggerGidSyncCallback)。(不需要为DoIP 服务组件指定服务端口。) 如果DoIPTriggerGidSyncDirect 参数不存在,DoIP 模块应使用带有 CallbackTriggerGIDSynchnonization 类型的客户端-服务器端口接口的RPort 来触发GID 同步。 | |
|  || |
|| |
| || |