一、原理介绍
传统龙伯格观测器,在设计观测器反馈增益矩阵K时,为简化分析与设计,根据静止两相坐标系下的对称关系,只引入了K、K,两个常系数,且在实际应用时,大多是通过试凑找到一组合适的反馈增益系数缺乏相关的理论依据。对于参数不同的电机,系数K、K,可能差别很大,参数整定需要一定的工作量。
在电机转速较低时,将K、K,视作常系数的方法并不会大幅改变观测器特征根分布,对系统运行造成很大影响,但是对于一些高速电机,当电机运行至较高转速,常系数反馈增益的设计方法会使得观测器特征根分布发生变化,而观测器特征根的负实部影响着观测器的收敛速度和对噪声的抑制能力,所以常反馈增益的龙伯格观测器在电机不同转速范围段进行转速估算性能可能有所差异。
为了解决上述问题,将龙伯格观测器的反馈增益矩阵转化为电机参数R、L以及电机转速的相应函数,根据自适应控制方法,利用极点配置的思想设计了一种变反馈增益的自适应龙伯格观测器。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
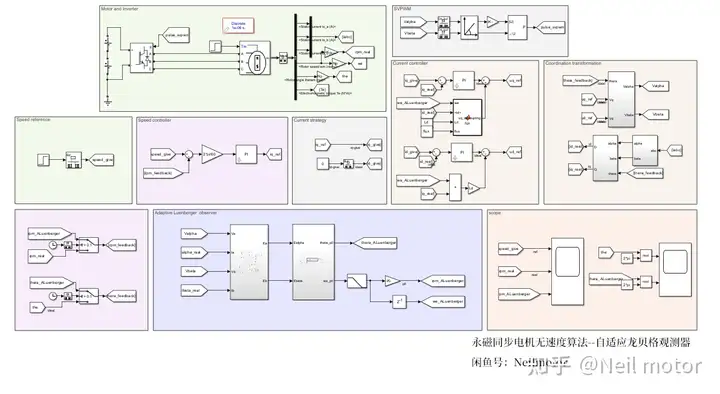
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载。其中由于低速时龙贝格观测器性能较差,0.1s从有传感器切至无传感器。
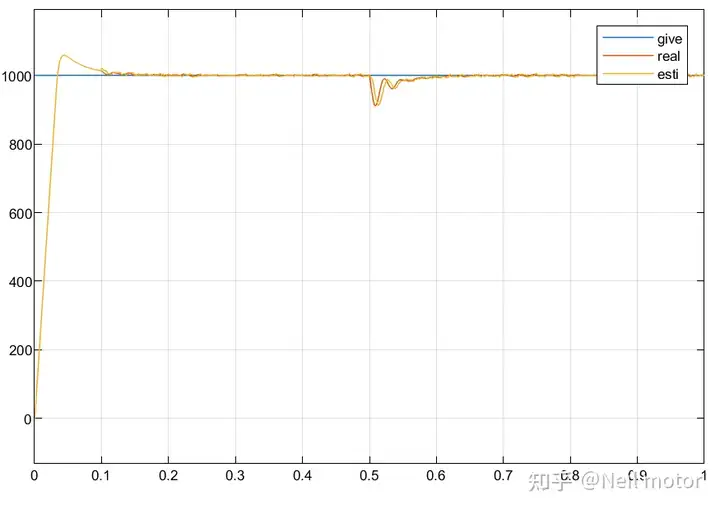
2.1给定转速、实际转速和估计转速
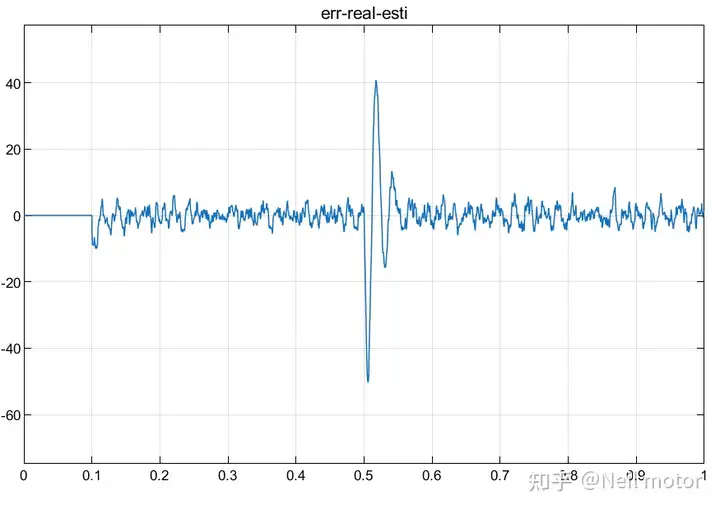
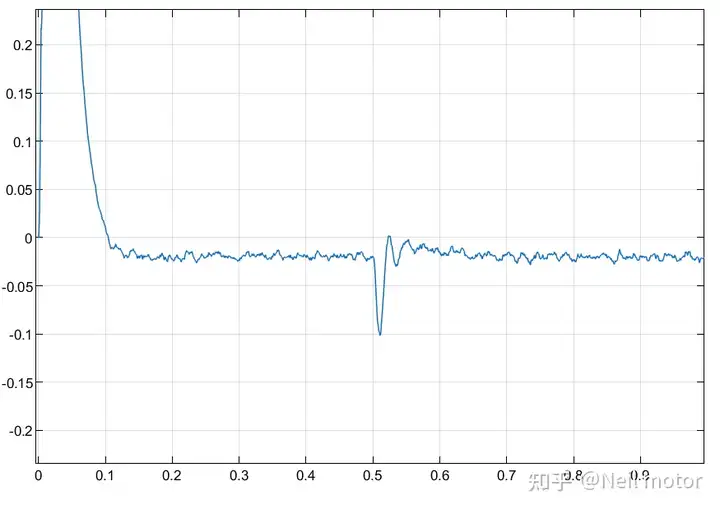
2.2估计转速与实际转速误差
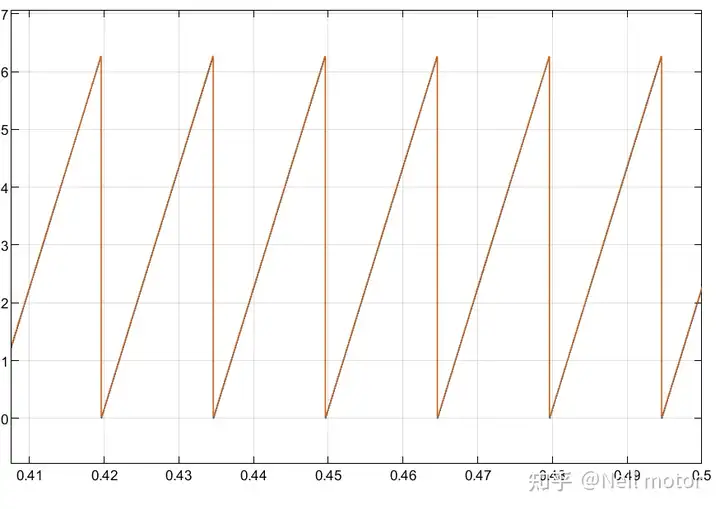
2.3估计转角与实际转角
2.4估计转角与实际转角误差
2.5电磁转矩

自适应龙贝格实现了更好的转速估计性能,误差更小,适用范围更广,并且参数调节简单。