一.OPENCV图形面积、弧长计算的API介绍
之前我们已经把图形轮廓的检测、画框等功能讲解了一遍。那今天我们主要结合轮廓检测的API去计算图形的面积,这些面积可以是矩形、圆形等等。图形面积计算和弧长计算常用于车辆识别、桥梁识别等重要功能,常用的API如contourArea、arcLength、minAreaRect、boundingRect、rectangle、line等等。
1.contourArea的API讲解
作用: 计算轮廓的曲线面积,也就是去计算**图像本身的面积,**计算的过程一般是用微积分等方式去计算。
CV_EXPORTS_W double contourArea( InputArray contour, bool oriented = false );
第一个参数:contour指的是每一个轮廓的数据,也称之为轮廓的点
第二个参数:oriented表示的是某一个方向上轮廓的面积值
返回值:计算后的轮廓面积2.arcLength的API讲解
**作用:**是计算轮廓的周长,也就是图形形状本身的曲线弧度周长
CV_EXPORTS_W double arcLength( InputArray curve, bool closed );
第一个参数:curve轮廓曲线的2D像素点
第二个参数:closed轮廓或者曲线是否闭合标志,true表示闭合
返回值:计算后的轮廓周长3.minAreaRect的API讲解
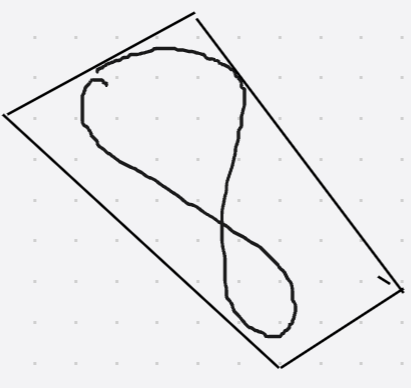
**作用:**是计算最小的外接矩形,最小外接矩形指的是找到一个矩形能够完全包裹所有的给定点,并且这个矩形是最小的。
如下图:从下图我们可以看到8这个形状,被minAreaRect的矩形包围了。这个矩形包含了整个形状的所有点,**更重要的这个矩形具有旋转功能,**这个8实际上有倾斜的角度,而这个最小矩形也能够完美包含进来。
CV_EXPORTS_W RotatedRect minAreaRect( InputArray points );
第一个参数:points输入的二维点数,可以Mat类型也可以是std::vector的向量类型
返回值:RotatedRect的矩形对象, 它表示的是一个轮廓的最小外接矩形,我们来看看RotatedRect结构体成员变量
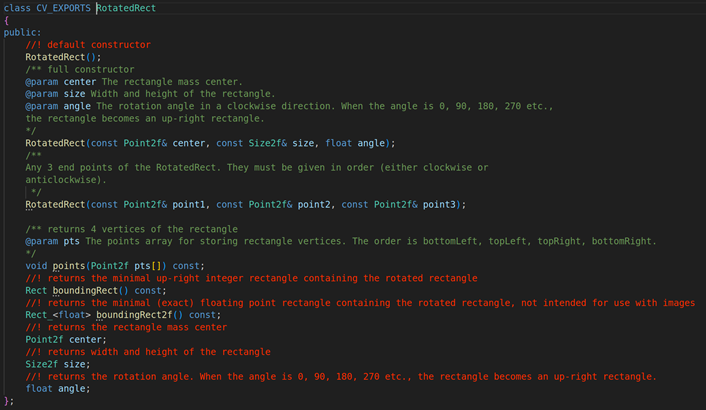
center : 旋转矩形的质心
size **:**旋转矩形的宽度和高度
angle **:**顺时针的旋转角度。
RotatedRect的四个点的确定
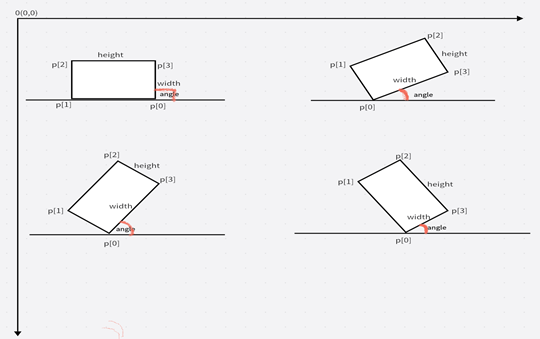
在RotatedRect中矩形四个点通常用Point2f来表示,其中p0点的确定是最关键的,p0的位置通常分为两种情况:
- 如果当前最小外接矩形没有与坐标轴平行,则Y坐标最大的为点p0,如2,3,4三张图
- 如果当前最小矩形和坐标轴平行,则有两个Y坐标最大的点,如图1
4.boundingRect的API讲解
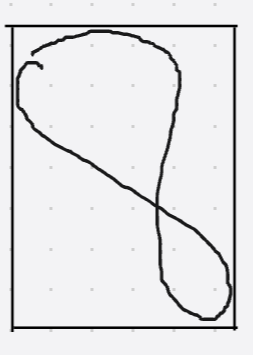
作用: 是计算图形轮廓垂直边界的最小矩形,这个矩形必须要和图像是上下边界平行的。
我们看上图:我们还是看8这个形状依然还是之前的位置,然后boundingRect产生的矩形对整个8进行垂直边界包围。
CV_EXPORTS_W Rect boundingRect( InputArray array );
第一个参数:array输入的灰度图像或者2D点集,数据类型为vector或者Mat矩阵数据
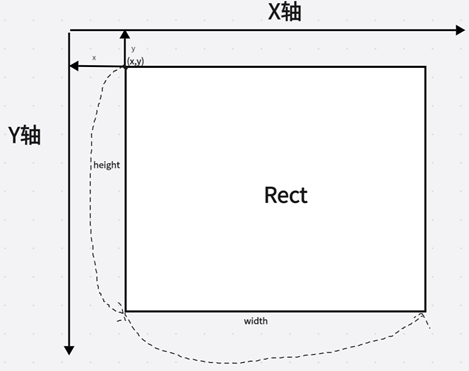
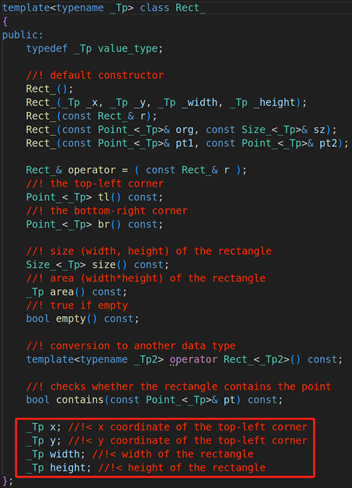
返回值:Rect的矩形对象,它表示的是物体轮廓的最大外接矩形。我们来看看Rect主要的成员变量Rect结构体
x **:**矩形的x坐标轴
y : 矩形的y坐标轴
width **:**矩形的宽度
height **:**矩形的高度
5.rectangle 的 API 讲解
**作用:**是绘制矩形,它有两种表示形式
1.以两个顶点的方式画矩形
void cv::rectangle(InputOutputArray img,
Point pt1,
Point pt2,
const Scalar & color,
int thickness = 1,
int lineType = LINE_8,
int shift = 0)**第一个参数:**输入的矩阵图像数据
**第二个参数:**pt1是矩形的一个顶点,左上角的顶点
**第三个参数:**pt2矩形中与pt1相对的顶点,也就是两个点在对角线上,也就是右下角的顶点
**第四个参数:**Scalar颜色的标量
**第五个参数:**thickness线宽
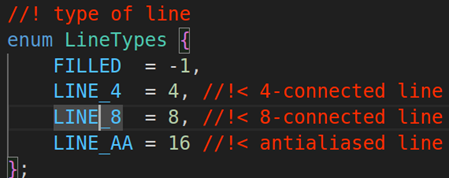
**第六个参数:**lineType线的类型,默认是LINE_8就行,具体的类型如下图:
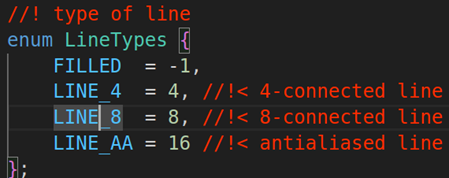
**第七个参数:**shift坐标的小数点位,默认为0就可以
2.以 Rect 的方式画矩形
void cv::rectangle(InputOutputArray img,
Rect rec,
const Scalar & color,
int thickness = 1,
int lineType = LINE_8, int shift = 0) 第一个参数:输入的矩阵图像数据
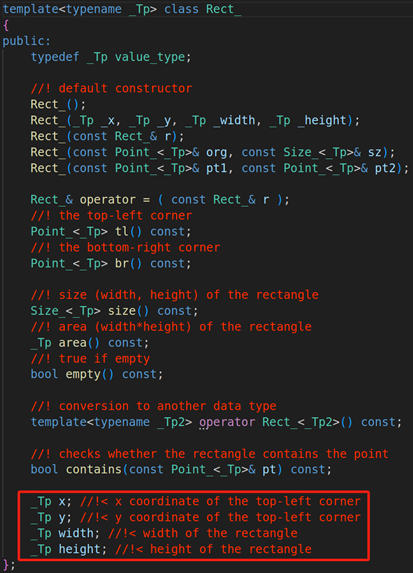
第二个参数:Rect的结构体,我们来看看这个Rect的重要成员变量
x:矩形的x坐标轴
y : 矩形的y坐标轴
width **:**矩形的宽度
height **:**矩形的高度
**第三个参数:**Scalar颜色的标量
**第四个参数:**thickness线宽,默认是1
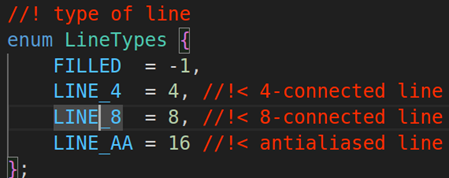
**第五个参数:**lineType线的类型,默认是LINE_8就行,line的类型如下:
**第六个参数:**shift坐标点的小数点位
6.line 的 API 讲解
**作用:**是通过两个点绘制直线
CV_EXPORTS_W void line(InputOutputArray img,
Point pt1,
Point pt2,
const Scalar& color,
int thickness = 1,
int lineType = LINE_8,
int shift = 0);**第一个参数:**输入的矩阵图像数据
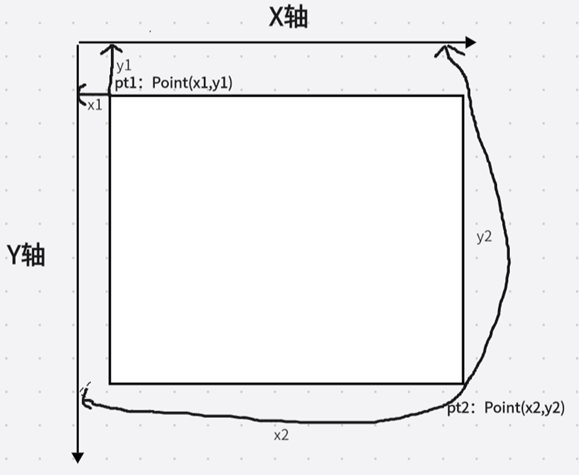
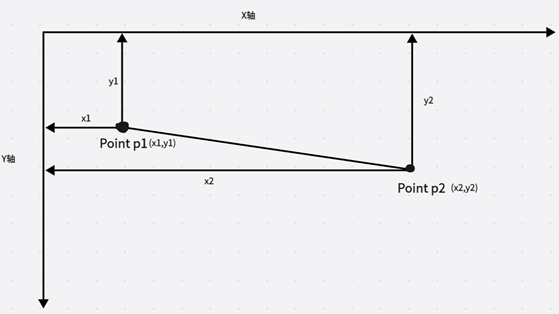
第二个参数: pt1是线的起始坐标,也就是图上x1坐标和y1坐标
**第三个参数:**pt2是线的终点坐标,也就是图上x2坐标和y2坐标
第四个参数: Scalar是颜色标量,绘制直线的颜色
**第五个参数:**thickness它是线的粗细程度,默认为1
**第六个参数:**lineType线的类型,默认是LINE_8就行,具体的类型
**第七个参数:**shift坐标点的小数点位数