( e ^ x ) 2 + ( e ^ y ) 2 + ( e ^ z ) 2 = 1 (\hat{e}_x)^2+(\hat{e}_y)^2+(\hat{e}_z)^2=1 (e^x)2+(e^y)2+(e^z)2=1
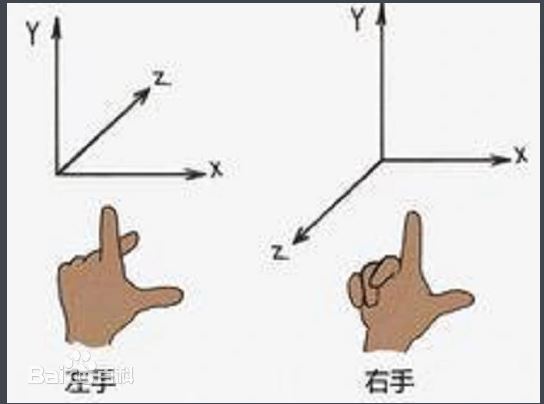
e ^ x , e ^ y , e ^ z \hat{e}_x,\hat{e}_y,\hat{e}_z e^x,e^y,e^z是单位向量在x axis,y axis,z axis上的分量。
2.3,向量反转
向量反转指的是向量的长度不变,但是向量的方向旋转180度。向量乘以-1即可得到一个长度相同方向相反的向量。
− a ⃗ = a ⃗ . − 1 -\vec{a}=\vec{a}.-1 −a =a .−1
点积运算:
a ⃗ . b ⃗ = a x b x + a y b y + a z b z = ∣ a ⃗ ∣ ∣ b ⃗ ∣ c o s θ \vec{a}.\vec{b}=a_xb_x+a_yb_y+a_zb_z=|\vec{a}||\vec{b}|cos\theta a .b =axbx+ayby+azbz=∣a ∣∣b ∣cosθ
当 两向量的夹角为0度时:
t h e t a = 0 o = > a ⃗ . b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ theta=0^o=>\vec{a}.\vec{b}=|\vec{a}||\vec{b}| theta=0o=>a .b =∣a ∣∣b ∣
当两向量垂直时:
⊥ b = > a ⃗ . b ⃗ = 0 \perp b => \vec{a}.\vec{b}=0 ⊥b=>a .b =0
当两向量夹角为180度时
θ = 180 o = > a ⃗ . b ⃗ . c o s θ = − ∣ a ⃗ ∣ ∣ b ⃗ ∣ \theta=180^o=>\vec{a}.\vec{b}.cos\theta=-|\vec{a}||\vec{b}| θ=180o=>a .b .cosθ=−∣a ∣∣b ∣
θ \theta θ为 a ⃗ \vec{a} a 与 b ⃗ \vec{b} b 的夹角,若当 b ⃗ \vec{b} b 为单元向量时(即长度为1),可推导出
a ⃗ . b ⃗ = a x b x + a y b y + a z b z = ∣ a ⃗ ∣ ∣ b ⃗ ∣ c o s θ = ∣ a ⃗ ∣ .1. c o s θ = ∣ a ⃗ ∣ c o s θ \vec{a}.\vec{b}=a_xb_x+a_yb_y+a_zb_z=|\vec{a}||\vec{b}|cos\theta=|\vec{a}|.1.cos\theta=|\vec{a}|cos\theta a .b =axbx+ayby+azbz=∣a ∣∣b ∣cosθ=∣a ∣.1.cosθ=∣a ∣cosθ
* 参考案例库:find_deformable_surface_model.hdev
* 可变形表面匹配模型应用,适用于弹性物体(如橡胶,布料)的形变检测与定位。
*
* 描述:
* 变形表面匹配模型将标准的模型 形变为与 3D 场景下的实例相识的模型
* This example shows how to use HALCON's deformable surface-based
* 3D matching to find potentially deformed objects in 3D scenes.
* In this example, a CAD model is used as reference model. Note that it
* would also be possible, to created the reference model from (multiple)
* views of the object (for more details, see the HDevelop example program
* reconstruct_3d_object_model_for_matching.hdev).
* To extend the supported range of deformations, deformed variants
* of the 3D object model are added to the deformable surface model.
* Finally, with the created deformed surface model, the object is searched
* for in a number of 3D scenes.
*
* The example demonstrates how to use the operators
* create_deformable_surface_model, and
* find_deformable_surface_model,
* add_deformable_surface_model_sample,
* get_deformable_surface_model_param, and
* get_deformable_surface_matching_result.
*
* Initialization
dev_update_off ()
* 配置显示参数
VisCamParam := [0.01,0,6e-6,6e-6,400,300,800,600]
VisPose1 := [0.00,0.01,0.62,122.0,357.0,120.0,0]
VisPose2 := [0.08,-0.77,0.35,298.0,353.0,315.0,0]
VisRefParName := ['alpha_0','color_0']
VisRefParValue := [0.75,'blue']
dev_close_window ()
dev_open_window_fit_size (0, 0, VisCamParam[|VisCamParam| - 2], VisCamParam[|VisCamParam| - 1], -1, -1, WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
*
Message := ['This example shows how to use HALCON\'s deformable surface-based 3D matching to find potentially deformed objects in 3D scenes.',' ','In this example, a CAD model is used as reference model.','To extend the supported range of deformations, deformed variants of the 3D object model are added to the deformable surface model.','Finally, with the created deformed surface model, the object is searched for in a number of 3D scenes.']
MessageWrapped := regexp_replace(Message + ' ',['(.{0,60})\\s','replace_all'],'$1\n')
disp_message (WindowHandle, MessageWrapped, 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* Define headings for the individual steps
Steps := 'Step 1: Create model'
Steps[1] := 'Step 2: Extend model (optional)'
Steps[2] := 'Step 3: Search for (deformed) instances of the object in 3D scenes'
*
* Introduce next step
dev_clear_window ()
disp_message (WindowHandle, Steps[0], 'window', 12, 12, 'white', 'false')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* =============================part01,创建可变形表面匹配模型
* 1.1,读取 用作参照物的 3D 模型
read_object_model_3d ('silicone_baking_mold/silicone_baking_mold_3d_model', 'm', 'convert_to_triangles', 'true', ObjectModel3DReference, Status)
参照物模型ObjectModel3DReference
3.1.2,设置可变形表面模型的搜索点。
复制代码
* 1.2,定义用于可变形表面模型搜索所需的搜索点
ReferencePointX := [4.2,4.2,4.2,-4.2,-4.2,-4.2] * 0.01
ReferencePointY := [7.75,0,-7.75,7.75,0,-7.75] * 0.01
ReferencePointZ := [3.0,3.0,3.0,3.0,3.0,3.0] * 0.01
*
* Visualize the 3D object model together with the reference points
Title := 'Step 1: Create model\n \nCreate deformable surface model from a 3D object model of a\nsilicone baking mold (blue) and some reference points (green)'
* 1.3,由搜索点组成的模型
gen_object_model_3d_from_points (ReferencePointX, ReferencePointY, ReferencePointZ, ObjectModel3DReferencePoints)
visualize_object_model_3d (WindowHandle, [ObjectModel3DReference,ObjectModel3DReferencePoints], VisCamParam, VisPose1, [VisRefParName,'color_1','point_size_1'], [VisRefParValue,'green',10], Title, [], [], PoseOut)
* Visualize the preprocessed 3D scene that shows a deformed instance of the object
if (Index == 1)
dev_clear_window ()
Title := 'Step 2: Extend model\n \nProvide 3D scenes with deformed variants of the 3D object model'
visualize_object_model_3d (WindowHandle, ObjectModel3DSearchSceneForDef, VisCamParam, VisPose2, [], [], Title, [], [], PoseOut)
endif
*
* Find the position of the reference model in the 3D scene
Title := 'Step 2: Extend model\n \nProcess scene ' + Index + ' of 3...'
dev_clear_window ()
disp_message (WindowHandle, Title, 'window', 12, 12, 'black', 'true')
* 2.3,在3D场景中搜索可变形表面匹配的最佳匹配实例,适用于弹性物体(如橡胶,布料)的形变检测与定位
find_deformable_surface_model (DeformableSurfaceModel, ObjectModel3DSearchSceneForDef, 0.03, 0, [], [], Score, DeformableSurfaceMatchingResult)
*
* Visualize matching results
Title := 'Step 2: Extend model\n \nDeformed reference object model (blue) aligned with deformed\nobject in 3D scene (white)'
* 2.4,返回变形后的 3D 模型
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'deformed_model', 0, ObjectModel3DDeformed)
visualize_object_model_3d (WindowHandle, [ObjectModel3DDeformed,ObjectModel3DSearchSceneForDef], VisCamParam, PoseOut, VisRefParName, VisRefParValue, Title, [], [], PoseOut)
*
* 在不同的3D场景中找到对象,即使它看起来变形了
for Index := 4 to 7 by 1
*
dev_clear_window ()
disp_message (WindowHandle, 'Step 3: Search for deformed model instances\n \nLoad scene ' + (Index - 3) + ' of 4...', 'window', 12, 12, 'black', 'true')
*
* 3.1, 读取包含(变形)对象实例的3D场景
read_object_model_3d ('silicone_baking_mold/silicone_baking_mold_3d_scene_' + Index$'02d', 'm', [], [], ObjectModel3DScene, Status)
*
*todo:如果对象模型缺少triangles与surface_attributes等关键信息会被降级为变量窗口?
* The background of the 3D scene is not eliminated to show that the
* (deformed) instance of the object can be found in the complete scene
* 3.2,3D场景的背景没有被消除,以显示(变形)对象的实例可以在完整的场景中找到
preprocess_object_model_3d (ObjectModel3DScene, 'false', 'true', 'true', ObjectModel3DSearchScene)
*
* Visualize the 3D scene
dev_clear_window ()
Title := 'Step 3: Search for deformed model instances\n \n3D scene in which the deformed object is searched for'
* 3.3,显示增强后的实例
visualize_object_model_3d (WindowHandle, ObjectModel3DSearchScene, VisCamParam, VisPose2, [], [], Title, [], [], PoseOut)
*
* 3.8,获取相对于匹配模型的位姿
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'rigid_pose', 0, Pose)
* 3.9 ,匹配模型刚体变化
rigid_trans_object_model_3d (ObjectModel3DReference, Pose, ObjectModel3DRigidTrans)
*
* 3.10,计算标准模型与形变模型之间的距离,为标识出变形程度作准备。
* ObjectModel3DReference:标准未发生形变的模型;ObjectModel3DDeformed:发生形变的模型
* ObjectModel3DRigidTrans:已与 3D场景实例对齐的标准模型
get_object_model_3d_params (ObjectModel3DDeformed, 'point_coord_x', DRX)
get_object_model_3d_params (ObjectModel3DDeformed, 'point_coord_y', DRY)
get_object_model_3d_params (ObjectModel3DDeformed, 'point_coord_z', DRZ)
get_object_model_3d_params (ObjectModel3DRigidTrans, 'point_coord_x', RTX)
get_object_model_3d_params (ObjectModel3DRigidTrans, 'point_coord_y', RTY)
get_object_model_3d_params (ObjectModel3DRigidTrans, 'point_coord_z', RTZ)
Deformation := sqrt((DRX - RTX) * (DRX - RTX) + (DRY - RTY) * (DRY - RTY) + (DRZ - RTZ) * (DRZ - RTZ))
* 3.11,计算出变形程度
DeformationClipped := min2(Deformation,gen_tuple_const(|Deformation|,0.02))
* Create a new 3D object model for the visualization of the deformations,
* add one single point with a special deformation, and set calculated deformations
* with negative sign to use the part from green to red defined in the lut 'color1'
*创建一个新的3D对象模型的可视化变形,
*添加一个特殊的变形单点,并设置计算变形
*带负号表示使用表"color1"中定义的从绿色到红色的部分
* 3.12,显示变形后的模型,按照变形大小进行颜色渲染
* 返回模型的几何中心坐标
get_object_model_3d_params (ObjectModel3DRigidTrans, 'center', Center)
gen_object_model_3d_from_points ([DRX,Center[0]], [DRY,Center[1]], [DRZ,Center[2]], ObjectModel3DVisDeformations)
* gen_object_model_3d_from_points ([DRX], [DRY], [DRZ], ObjectModel3DVisDeformations)
get_object_model_3d_params (ObjectModel3DReference, 'triangles', Triangles)
set_object_model_3d_attrib_mod (ObjectModel3DVisDeformations, 'triangles', [], Triangles)
* '&deformation'表示设置的是变形属性,属于扩展属性类型。
* 'points'指定将属性附加到点数据上(而非多边形或三角形等)
* [-DeformationClipped,0.02]:属性值数组,第一个元素应是变形量数据,第二个0.02表示变形缩放系数
set_object_model_3d_attrib_mod (ObjectModel3DVisDeformations, '&deformation', 'points', [-DeformationClipped,0.02])
Title := 'Step 3: Search for deformed model instances\n \n变形的参考对象模型\n(用颜色编码表示,红色代表较大变形)'
visualize_object_model_3d (WindowHandle, ObjectModel3DVisDeformations, VisCamParam, PoseOut, ['intensity_0','lut_0'], ['&deformation','color1'], Title, [], [], PoseOut)
*
* Cleanup
clear_object_model_3d (ObjectModel3DScene)
clear_object_model_3d (ObjectModel3DSearchScene)
clear_deformable_surface_matching_result (DeformableSurfaceMatchingResult)
clear_object_model_3d (ObjectModel3DDeformed)
clear_object_model_3d (ObjectModel3DReferencePointsDeformed)
clear_object_model_3d (ObjectModel3DRigidTrans)
clear_object_model_3d (ObjectModel3DVisDeformations)
endfor
clear_object_model_3d (ObjectModel3DReference)
clear_deformable_surface_model (DeformableSurfaceModel)
ObjectModel3DVisDeformations显示效果
可变形表面匹配模型,通过查找搜索点与3D场景实例匹配,生成3D场景实例的形变模型。
4,完整代码
复制代码
* 参考案例库:find_deformable_surface_model.hdev
* 可变形表面匹配模型应用,适用于弹性物体(如橡胶,布料)的形变检测与定位。
*
* 描述:
* 变形表面匹配模型将标准的模型 形变为与 3D 场景下的实例相识的模型
* This example shows how to use HALCON's deformable surface-based
* 3D matching to find potentially deformed objects in 3D scenes.
* In this example, a CAD model is used as reference model. Note that it
* would also be possible, to created the reference model from (multiple)
* views of the object (for more details, see the HDevelop example program
* reconstruct_3d_object_model_for_matching.hdev).
* To extend the supported range of deformations, deformed variants
* of the 3D object model are added to the deformable surface model.
* Finally, with the created deformed surface model, the object is searched
* for in a number of 3D scenes.
*
* The example demonstrates how to use the operators
* create_deformable_surface_model, and
* find_deformable_surface_model,
* add_deformable_surface_model_sample,
* get_deformable_surface_model_param, and
* get_deformable_surface_matching_result.
*
* Initialization
dev_update_off ()
* 配置显示参数
VisCamParam := [0.01,0,6e-6,6e-6,400,300,800,600]
VisPose1 := [0.00,0.01,0.62,122.0,357.0,120.0,0]
VisPose2 := [0.08,-0.77,0.35,298.0,353.0,315.0,0]
VisRefParName := ['alpha_0','color_0']
VisRefParValue := [0.75,'blue']
dev_close_window ()
dev_open_window_fit_size (0, 0, VisCamParam[|VisCamParam| - 2], VisCamParam[|VisCamParam| - 1], -1, -1, WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
*
Message := ['This example shows how to use HALCON\'s deformable surface-based 3D matching to find potentially deformed objects in 3D scenes.',' ','In this example, a CAD model is used as reference model.','To extend the supported range of deformations, deformed variants of the 3D object model are added to the deformable surface model.','Finally, with the created deformed surface model, the object is searched for in a number of 3D scenes.']
MessageWrapped := regexp_replace(Message + ' ',['(.{0,60})\\s','replace_all'],'$1\n')
disp_message (WindowHandle, MessageWrapped, 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* Define headings for the individual steps
Steps := 'Step 1: Create model'
Steps[1] := 'Step 2: Extend model (optional)'
Steps[2] := 'Step 3: Search for (deformed) instances of the object in 3D scenes'
*
* Introduce next step
dev_clear_window ()
disp_message (WindowHandle, Steps[0], 'window', 12, 12, 'white', 'false')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* =============================part01,创建可变形表面匹配模型
* 1.1,读取 用作参照物的 3D 模型
read_object_model_3d ('silicone_baking_mold/silicone_baking_mold_3d_model', 'm', 'convert_to_triangles', 'true', ObjectModel3DReference, Status)
* 判断参考对象是否有法线
get_object_model_3d_params (ObjectModel3DReference, 'has_point_normals', ParamValue)
* Define reference points that will be transformed into the search scene.
* Here, points where the silicone baking mold might be grasped
* with a vacuum cup are defined. Note that it is not necessary that
* the reference points lie on the surface of the object.
* 1.2,定义用于可变形表面模型搜索所需的搜索点
ReferencePointX := [4.2,4.2,4.2,-4.2,-4.2,-4.2] * 0.01
ReferencePointY := [7.75,0,-7.75,7.75,0,-7.75] * 0.01
ReferencePointZ := [3.0,3.0,3.0,3.0,3.0,3.0] * 0.01
*
* Visualize the 3D object model together with the reference points
Title := 'Step 1: Create model\n \nCreate deformable surface model from a 3D object model of a\nsilicone baking mold (blue) and some reference points (green)'
* 1.3,由搜索点组成的模型
gen_object_model_3d_from_points (ReferencePointX, ReferencePointY, ReferencePointZ, ObjectModel3DReferencePoints)
visualize_object_model_3d (WindowHandle, [ObjectModel3DReference,ObjectModel3DReferencePoints], VisCamParam, VisPose1, [VisRefParName,'color_1','point_size_1'], [VisRefParValue,'green',10], Title, [], [], PoseOut)
clear_object_model_3d (ObjectModel3DReferencePoints)
*
* Create deformable surface model from the 3D object model
* 1.4,创建可变形表面匹配模型
* stiffness:模型的刚性程度,控制模型在匹配中可以变形的程度
* 0.85:值越接近1模型的刚性越好(变形越小),值越接近0模型越灵活(允许更大的变形)
create_deformable_surface_model (ObjectModel3DReference, 0.03, 'stiffness', 0.85, DeformableSurfaceModel)
*
* Optionally, add the reference points that will be transformed to the
* geometry of the deformed search object.
* 1.5,给变形表面匹配模型添加搜索的参考点
* 可选项,添加搜索的参考点,用于定义匹配过程中的关键位置(如抓取点,特征点)
add_deformable_surface_model_reference_point (DeformableSurfaceModel, ReferencePointX, ReferencePointY, ReferencePointZ, ReferencePointIndex)
*
* Introduce next step
dev_clear_window ()
disp_message (WindowHandle, Steps[0:1], 'window', 12, 12, ['dim gray','white'], 'false')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* ================================= part02,添加样本,扩大支持变形的支持范围(可选)
*
* 可选项,将3D对象模型的变形实例添加到可变形表面模型
* 扩展变形的支持范围。
* 为此,使用上面创建的可变形表面模型在不同的场景中查找变形对象
* 从匹配结果中提取确定的变形,并随后添加到可变形表面模型中,以扩展支持范围
*的变形。
for Index := 1 to 3 by 1
*
* 2.1,读取3D对象实例
read_object_model_3d ('silicone_baking_mold/silicone_baking_mold_3d_scene_' + Index$'02d', 'm', [], [], ObjectModel3DScene, Status)
*
* 2.2,消除背景,平滑,法线归一化,使匹配速度更快,鲁棒性更强。
preprocess_object_model_3d (ObjectModel3DScene, 'true', 'true', 'true', ObjectModel3DSearchSceneForDef)
*
*
* Visualize the preprocessed 3D scene that shows a deformed instance of the object
if (Index == 1)
dev_clear_window ()
Title := 'Step 2: Extend model\n \nProvide 3D scenes with deformed variants of the 3D object model'
visualize_object_model_3d (WindowHandle, ObjectModel3DSearchSceneForDef, VisCamParam, VisPose2, [], [], Title, [], [], PoseOut)
endif
*
* Find the position of the reference model in the 3D scene
Title := 'Step 2: Extend model\n \nProcess scene ' + Index + ' of 3...'
dev_clear_window ()
disp_message (WindowHandle, Title, 'window', 12, 12, 'black', 'true')
* 2.3,在3D场景中搜索可变形表面匹配的最佳匹配实例,适用于弹性物体(如橡胶,布料)的形变检测与定位
find_deformable_surface_model (DeformableSurfaceModel, ObjectModel3DSearchSceneForDef, 0.03, 0, [], [], Score, DeformableSurfaceMatchingResult)
*
* Visualize matching results
Title := 'Step 2: Extend model\n \nDeformed reference object model (blue) aligned with deformed\nobject in 3D scene (white)'
* 2.4,返回变形后的 3D 模型
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'deformed_model', 0, ObjectModel3DDeformed)
visualize_object_model_3d (WindowHandle, [ObjectModel3DDeformed,ObjectModel3DSearchSceneForDef], VisCamParam, PoseOut, VisRefParName, VisRefParValue, Title, [], [], PoseOut)
*
visualize_object_model_3d (WindowHandle, ObjectModel3DDeformed, [], [], ['color_0'], ['blue'], [], [], [], PoseOut2)
* Get the deformed variant of the sampled reference model and add it as training sample
dev_clear_window ()
* 2.5,获取变形样本(点云形式呈现)
disp_message (WindowHandle, 'Step 2: Extend model\n \nAdd deformation from found instance to deformable surface model...', 'window', 12, 12, 'black', 'true')
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'deformed_sampled_model', 0, ObjectModel3DDeformedSampled)
* 2.6,向可变形表面匹配模型添加样本数据
add_deformable_surface_model_sample (DeformableSurfaceModel, ObjectModel3DDeformedSampled)
*
visualize_object_model_3d (WindowHandle, ObjectModel3DDeformedSampled, [], [], [], [], [], [], [], PoseOut1)
* Cleanup
clear_object_model_3d (ObjectModel3DScene)
clear_object_model_3d (ObjectModel3DSearchSceneForDef)
clear_deformable_surface_matching_result (DeformableSurfaceMatchingResult)
clear_object_model_3d (ObjectModel3DDeformed)
clear_object_model_3d (ObjectModel3DDeformedSampled)
endfor
*
* Introduce next step
dev_clear_window ()
disp_message (WindowHandle, Steps[0:2], 'window', 12, 12, ['dim gray','dim gray','white'], 'false')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
*===================================== part03,不同的3D场景中匹配对象,按照差异大小进行颜色渲染
* 在不同的3D场景中找到对象,即使它看起来变形了
for Index := 4 to 7 by 1
*
dev_clear_window ()
disp_message (WindowHandle, 'Step 3: Search for deformed model instances\n \nLoad scene ' + (Index - 3) + ' of 4...', 'window', 12, 12, 'black', 'true')
*
* 3.1, 读取包含(变形)对象实例的3D场景
read_object_model_3d ('silicone_baking_mold/silicone_baking_mold_3d_scene_' + Index$'02d', 'm', [], [], ObjectModel3DScene, Status)
*
*todo:如果对象模型缺少triangles与surface_attributes等关键信息会被降级为变量窗口?
* The background of the 3D scene is not eliminated to show that the
* (deformed) instance of the object can be found in the complete scene
* 3.2,3D场景的背景没有被消除,以显示(变形)对象的实例可以在完整的场景中找到
preprocess_object_model_3d (ObjectModel3DScene, 'false', 'true', 'true', ObjectModel3DSearchScene)
*
* Visualize the 3D scene
dev_clear_window ()
Title := 'Step 3: Search for deformed model instances\n \n3D scene in which the deformed object is searched for'
* 3.3,显示增强后的对象实例的3D场景
visualize_object_model_3d (WindowHandle, ObjectModel3DSearchScene, VisCamParam, VisPose2, [], [], Title, [], [], PoseOut)
*
* 3.4,进行基于表面的可变形匹配
find_deformable_surface_model (DeformableSurfaceModel, ObjectModel3DSearchScene, 0.03, 0, [], [], Score, DeformableSurfaceMatchingResult)
*
* 3.5,获取变形的模型
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'deformed_model', 0, ObjectModel3DDeformed)
*
* 3.6,获取变形后6个搜索点的位置
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'reference_point_x', 'all', ReferencePointXDeformed)
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'reference_point_y', 'all', ReferencePointYDeformed)
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'reference_point_z', 'all', ReferencePointZDeformed)
*
* Visualize the matching result
gen_object_model_3d_from_points (ReferencePointXDeformed, ReferencePointYDeformed, ReferencePointZDeformed, ObjectModel3DReferencePointsDeformed)
Title := 'Step 3: Search for deformed model instances\n \nMatched and deformed reference object model (blue)\nand deformed reference points (green)'
* 3.7,显示匹配结果(变形后的3D模型+变形后的6个搜索点+3D场景中的实例)
* ObjectModel3DDeformed:变形后的3D模型;ObjectModel3DSearchScene:3D场景中的实例;
* ObjectModel3DReferencePointsDeformed:形变后的6个模型搜索点组成的模型
visualize_object_model_3d (WindowHandle, [ObjectModel3DDeformed,ObjectModel3DSearchScene,ObjectModel3DReferencePointsDeformed], VisCamParam, PoseOut, [VisRefParName,'color_1','color_2','point_size_2'], [VisRefParValue,'white','green',10], Title, [], [], PoseOut)
*
* Visualize the deformations
* 3.8,获取相对于匹配模型的位姿
get_deformable_surface_matching_result (DeformableSurfaceMatchingResult, 'rigid_pose', 0, Pose)
* 3.9 ,匹配模型刚体变化
rigid_trans_object_model_3d (ObjectModel3DReference, Pose, ObjectModel3DRigidTrans)
*
* 3.10,计算标准模型与形变模型之间的距离,为标识出变形程度作准备。
* ObjectModel3DReference:标准未发生形变的模型;ObjectModel3DDeformed:发生形变的模型
* ObjectModel3DRigidTrans:已与 3D场景实例对齐的标准模型
get_object_model_3d_params (ObjectModel3DDeformed, 'point_coord_x', DRX)
get_object_model_3d_params (ObjectModel3DDeformed, 'point_coord_y', DRY)
get_object_model_3d_params (ObjectModel3DDeformed, 'point_coord_z', DRZ)
get_object_model_3d_params (ObjectModel3DRigidTrans, 'point_coord_x', RTX)
get_object_model_3d_params (ObjectModel3DRigidTrans, 'point_coord_y', RTY)
get_object_model_3d_params (ObjectModel3DRigidTrans, 'point_coord_z', RTZ)
Deformation := sqrt((DRX - RTX) * (DRX - RTX) + (DRY - RTY) * (DRY - RTY) + (DRZ - RTZ) * (DRZ - RTZ))
* 3.11,计算出变形程度
DeformationClipped := min2(Deformation,gen_tuple_const(|Deformation|,0.02))
* Create a new 3D object model for the visualization of the deformations,
* add one single point with a special deformation, and set calculated deformations
* with negative sign to use the part from green to red defined in the lut 'color1'
*创建一个新的3D对象模型的可视化变形,
*添加一个特殊的变形单点,并设置计算变形
*带负号表示使用表"color1"中定义的从绿色到红色的部分
* 3.12,显示变形后的模型,按照变形大小进行颜色渲染
* 返回模型的几何中心坐标
get_object_model_3d_params (ObjectModel3DRigidTrans, 'center', Center)
gen_object_model_3d_from_points ([DRX,Center[0]], [DRY,Center[1]], [DRZ,Center[2]], ObjectModel3DVisDeformations)
* gen_object_model_3d_from_points ([DRX], [DRY], [DRZ], ObjectModel3DVisDeformations)
get_object_model_3d_params (ObjectModel3DReference, 'triangles', Triangles)
set_object_model_3d_attrib_mod (ObjectModel3DVisDeformations, 'triangles', [], Triangles)
* '&deformation'表示设置的是变形属性,属于扩展属性类型。
* 'points'指定将属性附加到点数据上(而非多边形或三角形等)
* [-DeformationClipped,0.02]:属性值数组,第一个元素应是变形量数据,第二个0.02表示变形缩放系数
set_object_model_3d_attrib_mod (ObjectModel3DVisDeformations, '&deformation', 'points', [-DeformationClipped,0.02])
Title := 'Step 3: Search for deformed model instances\n \n变形的参考对象模型\n(用颜色编码表示,红色代表较大变形)'
visualize_object_model_3d (WindowHandle, ObjectModel3DVisDeformations, VisCamParam, PoseOut, ['intensity_0','lut_0'], ['&deformation','color1'], Title, [], [], PoseOut)
*
* Cleanup
clear_object_model_3d (ObjectModel3DScene)
clear_object_model_3d (ObjectModel3DSearchScene)
clear_deformable_surface_matching_result (DeformableSurfaceMatchingResult)
clear_object_model_3d (ObjectModel3DDeformed)
clear_object_model_3d (ObjectModel3DReferencePointsDeformed)
clear_object_model_3d (ObjectModel3DRigidTrans)
clear_object_model_3d (ObjectModel3DVisDeformations)
endfor
clear_object_model_3d (ObjectModel3DReference)
clear_deformable_surface_model (DeformableSurfaceModel)