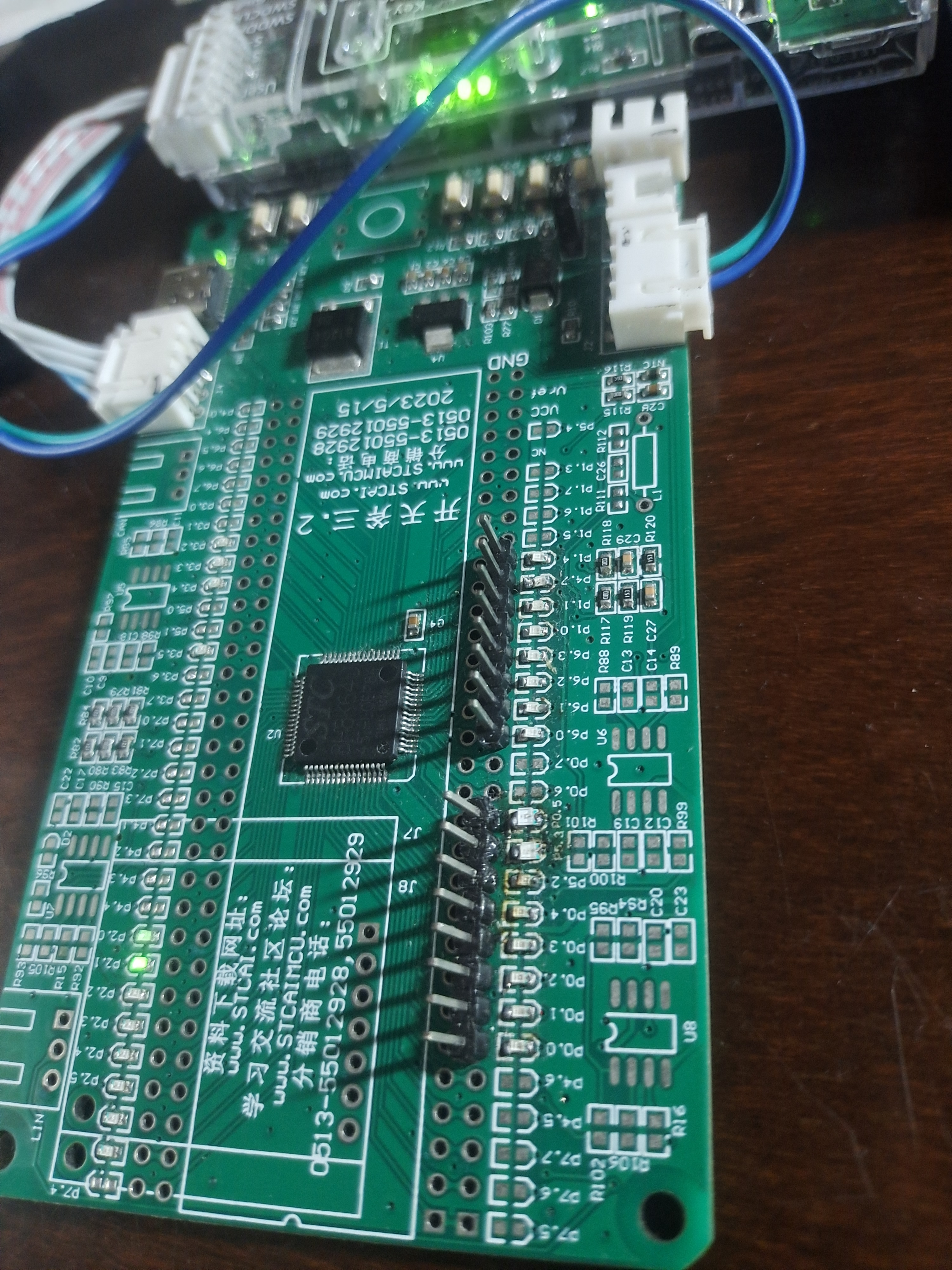
移植效果 P6口闪烁显示 PWM还需调试
#include "../comm/STC8h.h" //包含此头文件后,不需要再包含"reg51.h"头文件
#include "../comm/usb.h" //USB调试及复位所需头文件
#include "intrins.h"
/****************************** 用户定义宏 ***********************************/
#define MAIN_Fosc 24000000L //定义主时钟
#define Timer0_Reload (65536UL -(MAIN_Fosc / 1000)) //Timer 0 中断频率, 1000次/秒
/*****************************************************************************/
/*************本地变量声明**************/
bit B_1ms; //1ms标志
bit PWM1_Flag;
u16 Period;
u8 Counter;
u8 msSecond;
void UpdatePwm(void);
void TxPulse(void);
//USB调试及复位所需定义
char *USER_DEVICEDESC = NULL;
char *USER_PRODUCTDESC = NULL;
char *USER_STCISPCMD = "@STCISP#"; //设置自动复位到ISP区的用户接口命令
bit Key_Flag;
u16 Key_cnt;
void UpdatePwm(void);
void KeyResetScan(void);
//========================================================================
// 函数: void delay_ms(u8 ms)
// 描述: 延时函数。
// 参数: ms,要延时的ms数, 这里只支持1~255ms. 自动适应主时钟.
// 返回: none.
// 版本: VER1.0
// 日期: 2022-6-3
// 备注:
//========================================================================
void delay_ms(u8 ms)
{
u16 i;
do{
i = MAIN_Fosc / 10000;
while(--i); //10T per loop
}while(--ms);
}
//========================================================================
// 函数: void KeyResetScan(void)
// 描述: P3.2口按键长按1秒触发软件复位,进入USB下载模式。
// 参数: none.
// 返回: none.
// 版本: VER1.0
// 日期: 2022-6-11
// 备注:
//========================================================================
void KeyResetScan(void)
{
if(!P32)
{
if(!Key_Flag)
{
Key_cnt++;
if(Key_cnt >= 1000) //连续1000ms有效按键检测
{
Key_Flag = 1; //设置按键状态,防止重复触发
USBCON = 0x00; //清除USB设置
USBCLK = 0x00;
IRC48MCR = 0x00;
delay_ms(10);
IAP_CONTR = 0x60; //触发软件复位,从ISP开始执行
while (1);
}
}
}
else
{
Key_cnt = 0;
Key_Flag = 0;
}
}
/************* 发送脉冲函数 **************/
void TxPulse(void)
{
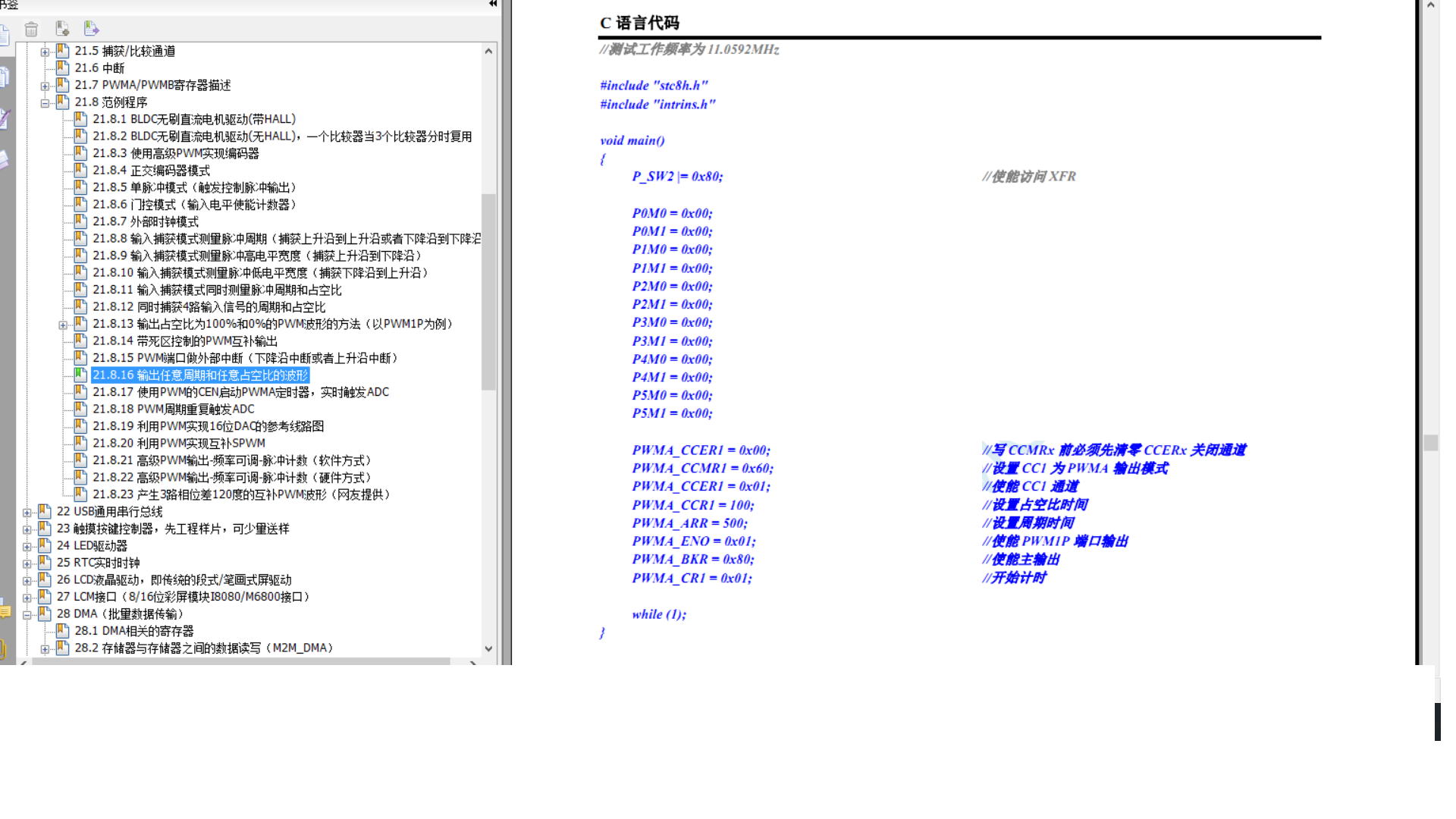
PWMA_CCER1 = 0x00; //写 CCMRx 前必须先清零 CCxE 关闭通道
PWMA_CCMR1 = 0x60; //设置 PWM1 模式1 输出
PWMA_CCER1 = 0x01; //使能 CC1E 通道, 高电平有效
PWMA_SR1 = 0; //清标志位
PWMA_CNTR = 0; //清计数器
PWMA_IER = 0x02; //使能捕获/比较 1 中断
}
/********************** Timer0 1ms中断函数 ************************/
void timer0(void) interrupt 1
{
B_1ms = 1;
if(PWM1_Flag)
{
Period++; //周期递增
if(Period >= 0x1000) PWM1_Flag = 0;
}
else
{
Period--; //周期递减
if(Period <= 0x0100) PWM1_Flag = 1;
}
UpdatePwm(); //设置周期、占空比
}
/******************* PWM中断函数 ********************/
void PWMA_ISR() interrupt 26
{
if(PWMA_SR1 & 0X02)
{
PWMA_SR1 &=~0X02; //清标志位
Counter++;
if(Counter >= 10) //计数10个脉冲后关闭PWM计数器
{
Counter = 0;
PWMA_CCER1 = 0x00; //写 CCMRx 前必须先清零 CCxE 关闭通道
PWMA_CCMR1 = 0x40; //设置 PWM1 强制为无效电平
PWMA_CCER1 = 0x01; //使能 CC1E 通道, 高电平有效
PWMA_IER = 0x00; //关闭中断
}
}
}
//========================================================================
// 函数: UpdatePwm(void)
// 描述: 更新PWM周期占空比.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2012-11-22
//========================================================================
void UpdatePwm(void)
{
PWMA_ARR = Period;
PWMA_CCR1 = (Period >> 1); //设置占空比时间: Period/2
}
/******************** 主函数 **************************/
void main(void)
{
P_SW2 |= 0x80; //扩展寄存器(XFR)访问使能
RSTFLAG |= 0x04; //设置硬件复位后需要检测P3.2的状态选择运行区域,否则硬件复位后进入USB下载模式
P0M1 = 0x00; P0M0 = 0x00; //设置为准双向口
P1M1 = 0x00; P1M0 = 0x00; //设置为准双向口
P2M1 = 0x00; P2M0 = 0x00; //设置为准双向口
P3M1 = 0x00; P3M0 = 0x00; //设置为准双向口
P4M1 = 0x00; P4M0 = 0x00; //设置为准双向口
P5M1 = 0x00; P5M0 = 0x00; //设置为准双向口
P6M1 = 0x00; P6M0 = 0x00; //设置为准双向口
P7M1 = 0x00; P7M0 = 0x00; //设置为准双向口
//USB调试及复位所需代码-----
P3M0 &= ~0x03;
P3M1 |= 0x03;
IRC48MCR = 0x80;
while (!(IRC48MCR & 0x01));
usb_init();
//-------------------------
// Timer0初始化
TMOD &= 0xf0;//16 bits timer auto-reload
AUXR |= 0x80;//Timer0 set as 1T
TH0 = (u8)(Timer0_Reload / 256);
TL0 = (u8)(Timer0_Reload % 256);
ET0 = 1; //Timer0 interrupt enable
TR0 = 1; //Tiner0 run
IE2 |= 0x80; //IE2相关的中断位操作使能后,需要重新设置EUSB
EA = 1; //打开总中断
P6=0X00;
delay_ms(50);
P6=0XFF;
delay_ms(50);
P6=0X00;
delay_ms(50);
P6=0XFF;
P6=0X00;
delay_ms(50);
P6=0XFF;
delay_ms(50);
P6=0X00;
delay_ms(50);
P6=0XFF;
P6=0X00;
delay_ms(50);
P6=0XFF;
delay_ms(50);
P6=0X00;
delay_ms(50);
P6=0XFF;
while (1)
{
if (bUsbOutReady) //USB调试及复位所需代码
{
// memcpy(UsbInBuffer, UsbOutBuffer, 64); //原路返回, 用于测试HID
// usb_IN();
usb_OUT_done();
}
}
}
原始例程文件
//测试工作频率为24MHz
/************* 功能说明 **************
本例程基于STC8H8K64U为主控芯片的实验箱8进行编写测试,
STC8H系列芯片可通用参考.
高级PWM定时器实现高速PWM脉冲输出.
周期/占空比可调, 通过比较/捕获中断进行脉冲个数计数.
通过P6口演示输出,每隔10ms输出一次PWM,计数10个脉冲后停止输出.
定时器每1ms调整PWM周期.
下载时,选择时钟24MHZ (用户可自行修改频率).
******************************************/
#include "reg51.h"
#include "intrins.h"
#define MAIN_Fosc 24000000L
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long u32;
sfr TH2 = 0xD6;
sfr TL2 = 0xD7;
sfr IE2 = 0xAF;
sfr INT_CLKO = 0x8F;
sfr AUXR = 0x8E;
sfr P_SW1 = 0xA2;
sfr P_SW2 = 0xBA;
sfr P4 = 0xC0;
sfr P5 = 0xC8;
sfr P6 = 0xE8;
sfr P7 = 0xF8;
sfr P1M1 = 0x91;
sfr P1M0 = 0x92;
sfr P0M1 = 0x93;
sfr P0M0 = 0x94;
sfr P2M1 = 0x95;
sfr P2M0 = 0x96;
sfr P3M1 = 0xB1;
sfr P3M0 = 0xB2;
sfr P4M1 = 0xB3;
sfr P4M0 = 0xB4;
sfr P5M1 = 0xC9;
sfr P5M0 = 0xCA;
sfr P6M1 = 0xCB;
sfr P6M0 = 0xCC;
sfr P7M1 = 0xE1;
sfr P7M0 = 0xE2;
sbit P00 = P0^0;
sbit P01 = P0^1;
sbit P02 = P0^2;
sbit P03 = P0^3;
sbit P04 = P0^4;
sbit P05 = P0^5;
sbit P06 = P0^6;
sbit P07 = P0^7;
sbit P10 = P1^0;
sbit P11 = P1^1;
sbit P12 = P1^2;
sbit P13 = P1^3;
sbit P14 = P1^4;
sbit P15 = P1^5;
sbit P16 = P1^6;
sbit P17 = P1^7;
sbit P20 = P2^0;
sbit P21 = P2^1;
sbit P22 = P2^2;
sbit P23 = P2^3;
sbit P24 = P2^4;
sbit P25 = P2^5;
sbit P26 = P2^6;
sbit P27 = P2^7;
sbit P30 = P3^0;
sbit P31 = P3^1;
sbit P32 = P3^2;
sbit P33 = P3^3;
sbit P34 = P3^4;
sbit P35 = P3^5;
sbit P36 = P3^6;
sbit P37 = P3^7;
sbit P40 = P4^0;
sbit P41 = P4^1;
sbit P42 = P4^2;
sbit P43 = P4^3;
sbit P44 = P4^4;
sbit P45 = P4^5;
sbit P46 = P4^6;
sbit P47 = P4^7;
sbit P50 = P5^0;
sbit P51 = P5^1;
sbit P52 = P5^2;
sbit P53 = P5^3;
sbit P54 = P5^4;
sbit P55 = P5^5;
sbit P56 = P5^6;
sbit P57 = P5^7;
/******************************用户定义宏 ***********************************/
#define Timer0_Reload (65536UL -(MAIN_Fosc / 1000))
#define PWMA_ENO (*(unsigned char volatile xdata *) 0xFEB1)
#define PWMA_PS (*(unsigned char volatile xdata *) 0xFEB2)
#define PWMB_ENO (*(unsigned char volatile xdata *) 0xFEB5)
#define PWMB_PS (*(unsigned char volatile xdata *) 0xFEB6)
#define PWMA_CR1 (*(unsigned char volatile xdata *) 0xFEC0)
#define PWMA_CR2 (*(unsigned char volatile xdata *) 0xFEC1)
#define PWMA_SMCR (*(unsigned char volatile xdata *) 0xFEC2)
#define PWMA_ETR (*(unsigned char volatile xdata *) 0xFEC3)
#define PWMA_IER (*(unsigned char volatile xdata *) 0xFEC4)
#define PWMA_SR1 (*(unsigned char volatile xdata *) 0xFEC5)
#define PWMA_SR2 (*(unsigned char volatile xdata *) 0xFEC6)
#define PWMA_EGR (*(unsigned char volatile xdata *) 0xFEC7)
#define PWMA_CCMR1 (*(unsigned char volatile xdata *) 0xFEC8)
#define PWMA_CCMR2 (*(unsigned char volatile xdata *) 0xFEC9)
#define PWMA_CCMR3 (*(unsigned char volatile xdata *) 0xFECA)
#define PWMA_CCMR4 (*(unsigned char volatile xdata *) 0xFECB)
#define PWMA_CCER1 (*(unsigned char volatile xdata *) 0xFECC)
#define PWMA_CCER2 (*(unsigned char volatile xdata *) 0xFECD)
#define PWMA_CNTR (*(unsigned int volatile xdata *) 0xFECE)
#define PWMA_CNTRH (*(unsigned char volatile xdata *) 0xFECE)
#define PWMA_CNTRL (*(unsigned char volatile xdata *) 0xFECF)
#define PWMA_PSCRH (*(unsigned char volatile xdata *) 0xFED0)
#define PWMA_PSCRL (*(unsigned char volatile xdata *) 0xFED1)
#define PWMA_ARR (*(unsigned int volatile xdata *) 0xFED2)
#define PWMA_ARRH (*(unsigned char volatile xdata *) 0xFED2)
#define PWMA_ARRL (*(unsigned char volatile xdata *) 0xFED3)
#define PWMA_RCR (*(unsigned char volatile xdata *) 0xFED4)
#define PWMA_CCR1 (*(unsigned int volatile xdata *) 0xFED5)
#define PWMA_CCR1H (*(unsigned char volatile xdata *) 0xFED5)
#define PWMA_CCR1L (*(unsigned char volatile xdata *) 0xFED6)
#define PWMA_CCR2 (*(unsigned int volatile xdata *) 0xFED7)
#define PWMA_CCR2H (*(unsigned char volatile xdata *) 0xFED7)
#define PWMA_CCR2L (*(unsigned char volatile xdata *) 0xFED8)
#define PWMA_CCR3 (*(unsigned int volatile xdata *) 0xFED9)
#define PWMA_CCR3H (*(unsigned char volatile xdata *) 0xFED9)
#define PWMA_CCR3L (*(unsigned char volatile xdata *) 0xFEDA)
#define PWMA_CCR4 (*(unsigned int volatile xdata *) 0xFEDB)
#define PWMA_CCR4H (*(unsigned char volatile xdata *) 0xFEDB)
#define PWMA_CCR4L (*(unsigned char volatile xdata *) 0xFEDC)
#define PWMA_BKR (*(unsigned char volatile xdata *) 0xFEDD)
#define PWMA_DTR (*(unsigned char volatile xdata *) 0xFEDE)
#define PWMA_OISR (*(unsigned char volatile xdata *) 0xFEDF)
/*****************************************************************************/
#define PWM1_1 0x00 //P:P1.0 N:P1.1
#define PWM1_2 0x01 //P:P2.0 N:P2.1
#define PWM1_3 0x02 //P:P6.0 N:P6.1
#define PWM2_1 0x00 //P:P1.2/P5.4 N:P1.3
#define PWM2_2 0x04 //P:P2.2 N:P2.3
#define PWM2_3 0x08 //P:P6.2 N:P6.3
#define PWM3_1 0x00 //P:P1.4 N:P1.5
#define PWM3_2 0x10 //P:P2.4 N:P2.5
#define PWM3_3 0x20 //P:P6.4 N:P6.5
#define PWM4_1 0x00 //P:P1.6 N:P1.7
#define PWM4_2 0x40 //P:P2.6 N:P2.7
#define PWM4_3 0x80 //P:P6.6 N:P6.7
#define PWM4_4 0xC0 //P:P3.4 N:P3.3
#define ENO1P 0x01
#define ENO1N 0x02
#define ENO2P 0x04
#define ENO2N 0x08
#define ENO3P 0x10
#define ENO3N 0x20
#define ENO4P 0x40
#define ENO4N 0x80
/*************本地变量声明**************/
bit B_1ms; //1ms标志
bit PWM1_Flag;
u16 Period;
u8 Counter;
u8 msSecond;
void UpdatePwm(void);
void TxPulse(void);
/******************** 主函数 **************************/
void main(void)
{
P0M1 = 0x00; P0M0 = 0x00; //设置为准双向口
P1M1 = 0x00; P1M0 = 0x00; //设置为准双向口
P2M1 = 0x00; P2M0 = 0x00; //设置为准双向口
P3M1 = 0x00; P3M0 = 0x00; //设置为准双向口
P4M1 = 0x00; P4M0 = 0x00; //设置为准双向口
P5M1 = 0x00; P5M0 = 0x00; //设置为准双向口
P6M1 = 0x00; P6M0 = 0x00; //设置为准双向口
P7M1 = 0x00; P7M0 = 0x00; //设置为准双向口
PWM1_Flag = 0;
Counter = 0;
Period = 0x1000;
//Timer0初始化
AUXR = 0x80; //Timer0 set as 1T,16 bits timer auto-reload,
TH0 = (u8)(Timer0_Reload / 256);
TL0 = (u8)(Timer0_Reload % 256);
ET0 = 1; //Timer0 interrupt enable
TR0 = 1; //Tiner0 run
P_SW2 |= 0x80; //使能XFR访问
PWMA_ENO = 0x00;
PWMA_ENO |= ENO1P; //使能输出
PWMA_PS = 0x00; //高级 PWM 通道输出脚选择位
PWMA_PS |= PWM1_3; //选择 PWM1_3 通道
UpdatePwm();
PWMA_BKR = 0x80; //使能主输出
PWMA_CR1 |= 0x01; //开始计时
P40 = 0; //给LED供电
EA = 1; //打开总中断
while (1)
{
if(B_1ms)
{
B_1ms = 0;
msSecond++;
if(msSecond >= 10)
{
msSecond = 0;
TxPulse(); //10ms启动一次PWM输出
}
}
}
}
/************* 发送脉冲函数 **************/
void TxPulse(void)
{
PWMA_CCER1 = 0x00; //写 CCMRx 前必须先清零 CCxE 关闭通道
PWMA_CCMR1 = 0x60; //设置 PWM1 模式1 输出
PWMA_CCER1 = 0x01; //使能 CC1E 通道, 高电平有效
PWMA_SR1 = 0; //清标志位
PWMA_CNTR = 0; //清计数器
PWMA_IER = 0x02; //使能捕获/比较 1 中断
}
/********************** Timer0 1ms中断函数 ************************/
void timer0(void) interrupt 1
{
B_1ms = 1;
if(PWM1_Flag)
{
Period++; //周期递增
if(Period >= 0x1000) PWM1_Flag = 0;
}
else
{
Period--; //周期递减
if(Period <= 0x0100) PWM1_Flag = 1;
}
UpdatePwm(); //设置周期、占空比
}
/******************* PWM中断函数 ********************/
void PWMA_ISR() interrupt 26
{
if(PWMA_SR1 & 0X02)
{
PWMA_SR1 &=~0X02; //清标志位
Counter++;
if(Counter >= 10) //计数10个脉冲后关闭PWM计数器
{
Counter = 0;
PWMA_CCER1 = 0x00; //写 CCMRx 前必须先清零 CCxE 关闭通道
PWMA_CCMR1 = 0x40; //设置 PWM1 强制为无效电平
PWMA_CCER1 = 0x01; //使能 CC1E 通道, 高电平有效
PWMA_IER = 0x00; //关闭中断
}
}
}
//========================================================================
// 函数: UpdatePwm(void)
// 描述: 更新PWM周期占空比.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2012-11-22
//========================================================================
void UpdatePwm(void)
{
PWMA_ARR = Period;
PWMA_CCR1 = (Period >> 1); //设置占空比时间: Period/2
}