摘 要
机械制造业是国家的重要产业,随着时代的发展,智能化越来越在生活中变得普遍,工业的发展深深的影响着一个国家的经济发展。全球经济的发展带领着机械工业在不断的进步。随着国外先进技术在我国的传播,也影响着我国技术的发展,在全球经济的大环境的推动下,大型四边形滚动机器人为了满足市场需求,需对其进行优化设计,使之能够跟上现代工业技术的发展需求。因此,对大型四边形滚动机器人的研究具有重要意义。
通过查找相关文献和实践调研,更加清晰的了解了大型四边形滚动机器人的实际工作情况,因此本次选择的设计题目是大型四边形滚动机器人,设计的内容包括对滚动机器人总体方案的设计及工作原理的分析,对整个机械传动进行计算,最后对主要零部件的强度进行校核。
本次主要涉及领域为机器人领域,通过设计机器人的结构和对机构的控制进行机器人的操控,本次研究的大型四边形机器人采用结构为滚动结构,通过人为的控制,进行机构运动的实现,机器人采用四杆机构,通过仿真模拟和机构关联运动实现机器人的滚动以及其他运动功能。
摘 要
机械制造业是国家的重要产业,随着时代的发展,智能化越来越在生活中变得普遍,工业的发展深深的影响着一个国家的经济发展。全球经济的发展带领着机械工业在不断的进步。随着国外先进技术在我国的传播,也影响着我国技术的发展,在全球经济的大环境的推动下,大型四边形滚动机器人为了满足市场需求,需对其进行优化设计,使之能够跟上现代工业技术的发展需求。因此,对大型四边形滚动机器人的研究具有重要意义。
通过查找相关文献和实践调研,更加清晰的了解了大型四边形滚动机器人的实际工作情况,因此本次选择的设计题目是大型四边形滚动机器人,设计的内容包括对滚动机器人总体方案的设计及工作原理的分析,对整个机械传动进行计算,最后对主要零部件的强度进行校核。
本次主要涉及领域为机器人领域,通过设计机器人的结构和对机构的控制进行机器人的操控,本次研究的大型四边形机器人采用结构为滚动结构,通过人为的控制,进行机构运动的实现,机器人采用四杆机构,通过仿真模拟和机构关联运动实现机器人的滚动以及其他运动功能。
目 录
摘 要 I
Abstract I
第1章 绪论 1
1.1 研究背景与意义 1
1.2 机器人国内外研究现状 2
1.3主要研究内容 3
1.4四边形滚动机器人构型设计 4
1.4.1支撑稳定性 4
1.4.2结构稳定性 4
1.4.3移动灵活性 7
1.5多面体机器人结构选取 8
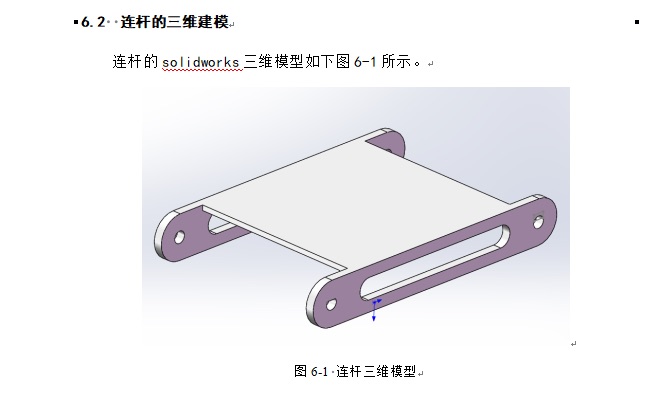
1.5机器人的Solidworks设计 8
1.5.1草图绘制 8
1.5.2基准特征-参考几何体的创建 9
1.5.3拉伸、旋转、扫描和放样特征建模 9
1.5.4工程图设计 9
1.5.5装配设计 9
第2章 大型四边形滚动机器人总体方案结构设计 10
2.1大型四边形滚动机器人总体方案结构设计 10
2.2大型四边形滚动机器人的工作原理 10
2.3大型四边形滚动机器人的应用 11
第3章 机械传动的设计计算 12
3.1总体参数的确定及估算 12
3.2伺服电机的选型计算 12
3.3减速器的选择 14
3.3.1确定传动装置的传动比 14
3.3.2计算传动装置的运动和动力参数 15
3.4高速级齿轮传动设计计算 16
第4章 主要零部件的计算及校核 22
4.1传动轴的设计计算 22
4.2轴承的设计计算 22
4.3传动轴强度的校核 23
4.4轴承强度的校核计算 26
第5章 结论 28
参考文献 29
致谢 30
第1章 绪论
1.1 研究背景与意义
随着现代科技的不断发展,机器人逐渐被诞生,随着现代社会的进步,现如今机器已融入人们的大部分生活,在一些工厂,随处可见的机器代替人工繁重的劳动,使生产效率大大提高,因此相关规定将机器人作为重点发展的领域,在新时代政策的推进下,机器人智能化工作将得到普遍应用,财政也对机器人领域大力支持,使机器人可以快速发展,在世界中占有一定地位,同时,在未来生活,应该注意机器人与人的协调工作,世界也应抓住时机,使机器人可以在走进专用场合的基础上走进生活,让大家共享机器人的发展成果。
随着人类的发展,生活水平在逐渐的提高,同时人类对于辅助工具的需求也在不断的提高,而机器人作为众多辅助工具中的一种,对于人类工作效率的提升具有重要的意义。机器人中分为多种类型,其中移动机器人作为机器人的一种类型,为人类在行动方面的能力作出重要贡献,汽车飞机等交通工具出现之后,极大的改善了出行问题,使以前人们对于距离的理解有了颠覆性的改变,太空飞船,火星车和一些发射到外太空的火箭都让人们对于宇宙有了更深层次的认识,这些事例都是机器在改变人类的生活,不断拓宽人类认知的视野,开启了空间探测的新篇章。传统的可移动机器人都有各自的专项行走能里,例如轮式机器适合在较为平坦的地面进行工作,履带式机器更加适合在较为松软的崎岖路面上行走、腿式机器适应于在凹凸的路面行走。虽然各自都有不同的适应环境,但在遇到极端复杂的环境时,传统的移动机器人很难克服。例如,在汶川发生地震后,平坦的路面被极度破坏,很多车辆在这样的路面上都难以通过,无奈之下只能依靠人工实施救援行动,人工救援行进速度低,导致救援效率下降,因此,急需针对这样的特殊情况设计一种相关的机器人。
随着机器人的诞生和发展,逐渐的在工业中涌现出了一系列工业机器人,属于高科技时代下的新型产物。而滚动机器人就是工业机器人的一类分支,被广泛应用于环境恶略及危险行业,简单简单,活动灵活,可代替人工完成一些困难的工作。尽管四边形滚动机器人无法与人工操作媲美,存在一定局限性,但是其对环境的适应能力强,并且承载能力强,仍然可以降低大量的人力。相比国外的工业机器人技术,国内起步相对较晚,在之后的发展中,尤其是在工业制造中,出现了大量的不同种类的机械人,除常规搬运零件外,在组装成品、喷涂、冲压等环节也都得到了应用,极大程度上减轻人力劳动,并且降低零件加工对环境的苛刻要求。
进入高科技时代以后,各行各业对于机器人的要求日益增长,机器人在制造领域都扮演着至关重要的角色,因此对其的要求更为严格。首先机器人的精度最为重要,机器人是在进行重复运动,若每次往复后出现偏差就会影响到整条生产线的生产质量;其次是模块化,将机器人的各组件模块化后更能反映其内部特性,并且使机器人更为灵活精准,可以使结构多样化,具备多种功能,扩大了机械手的工作范围,模块化必将是机器人研究的重要方向之一;然后是无油化,考虑到在食品、精密加工等领域内也需要机械辅助,但是对安全卫生方面要求较高,因此无油化也将是发展趋势;最后是实现人机交互,试图利用遥控或编程实现远程控制,即将遥控操作系统加入到机器人中,使机器人操作更加智能便捷。
机器意味着运动,很少有自主操作,而结合人工智能,输入相关程序,可以通过学习编程等方式,改善机器操作,达到省时省力的目的,类似于人脑与手的关系,但不同点在于人工智能还需要机器制造进行完备,而传统由人操控的机器,不能实现自动化生产,导致加工效率和速度较慢。
而人工智能可以很好的消除这种限制。目前的工业环境都逐步迈入自动化时代,以往的人力劳动得到解放,取而代之的是一系列自动化或半自动化的机械设备。其单价低廉,而效率高,具有极高的使用性价比。机器人领域涉及到不同的行业,因此将机器人相关理论结合不能领域是当前的研究重点,对不同领域的开拓,实现专业结合,将几个学科作为一个整体,从而形成一种非常强烈的集体工作。
1.2 机器人国内外研究现状
随着现代社会高速发展,计算机技术和程序算法,包括自主学习功能的发展也有了一定程度的提高,随着人工智能的日新月异,移动机器人在不同方面都得到不同程度的更新1。在1980年,智能机器人的普遍定义是有感觉、思考、决策和动作能力的系统,这句简单的概括在现如今科技发达的时代依旧实用,而且对今天的机器人设计也有一定程度的指导作用,在一些领域里,机器人技术结合相关专业知识,可以制造出不同工作能力的机器人,适用于不同场合,水下机器人、空间机器人、空中机器人、地面机器人、微小型机器人等各种用途的机器人相继问世,许多梦想成为现实2。不仅如此,机器人的各种技术也得到相应改进,例如,传感技术、控制技术和应用技术已经推广到很多领域,目前网络流行的软件机器人"、"网络机器人"的名称,这也说明了机器人具有很强的生命力,就是通过信息交融进行实现的3。
对比世界关于机器人的研究,美国研究历史较早,早在1960年,