绝对位置编码
传统的BERT中的实现方法,假设模型最大输出长度是512,向量纬度是768,需要先初始化一个512*768的位置编码矩阵。在每个位置,将位置编码直接加到token向量上。
- 问题:
- 不具备长度外推性。
正弦曲线(Sinusoidal)位置编码PE
是谷歌在Transformer中提出的绝对位置编码, 计算公式如下:
PE(k,2i)=sin(10000d2ik)PE(k,2i+1)=cos(10000d2ik)
其中,d表示向量纬度,k表示第k个位置,2i和2i+1表示位置向量的分量索引,如 PE(k,2i)表示位置k向量第2i个分量。
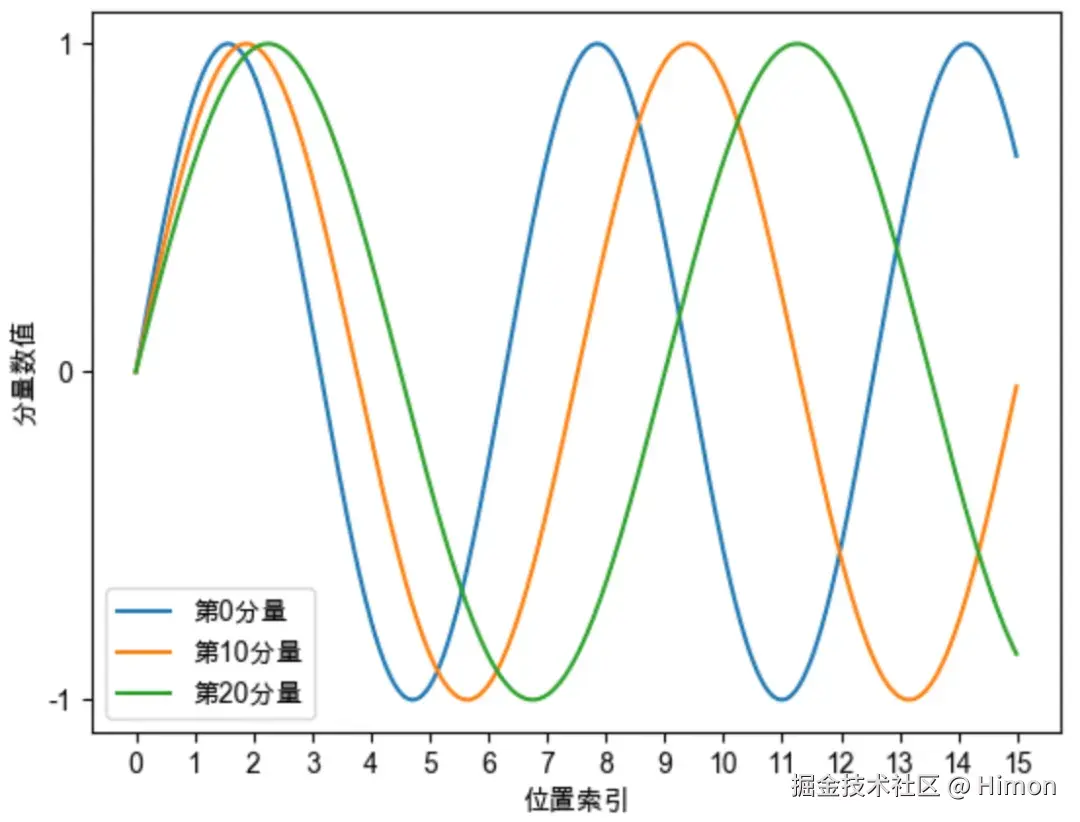
正弦曲线位置编码每个分量都是正弦或者余弦函数,具有周期性 。如下图,每个分量都有周期性,而且越靠后的分量,波长越大,频率越低。
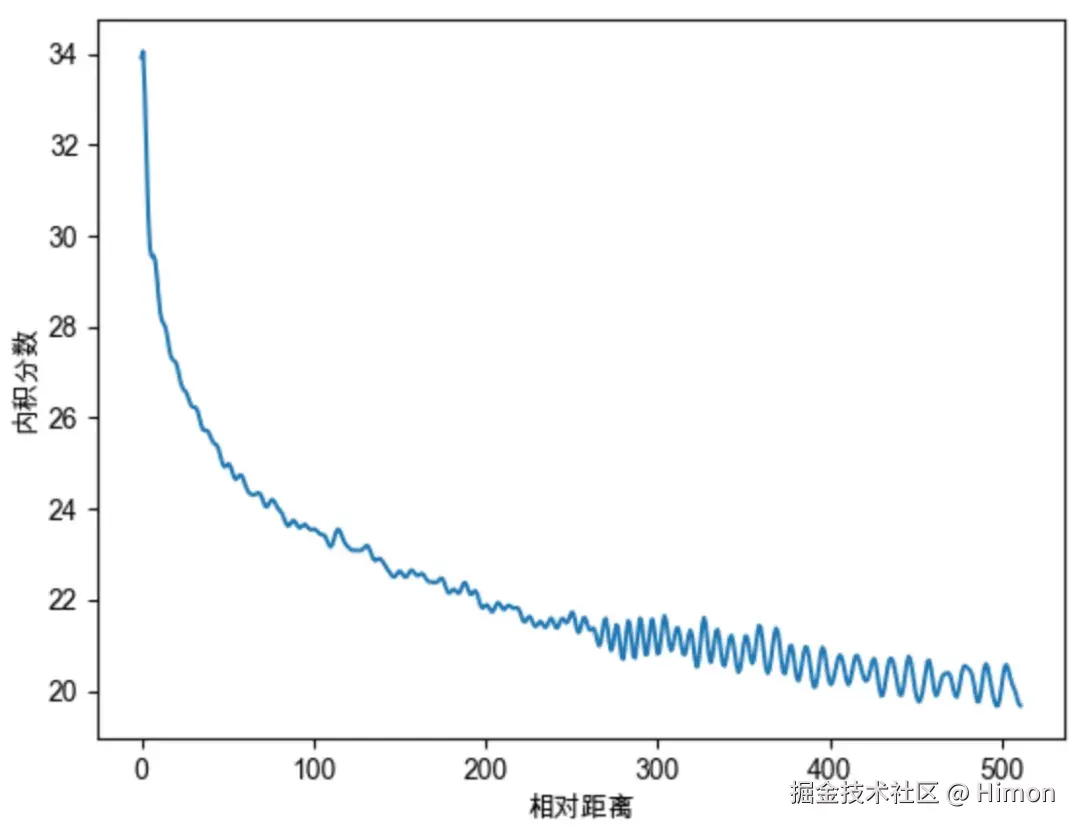
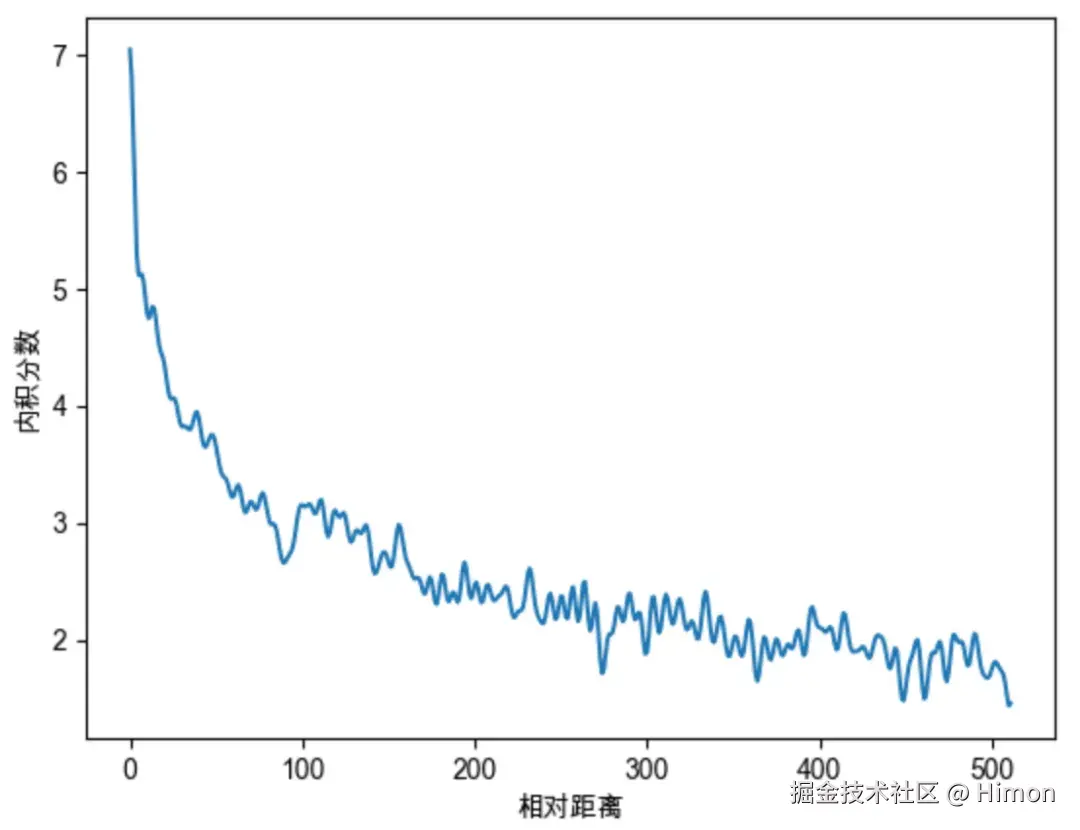
正弦曲线位置编码还具有远程衰减的性质:对两个相同的词向量,如果他们之间的距离越近,相对位置就越小,则他们的内积分数就越高,反之越小。
-
代码实现:
iniclass SinPositionEncoding(nn.Module): def __init__(self, max_sequence_length, d_model, base=10000): super().__init__() self.max_sequence_length = max_sequence_length self.d_model = d_model self.base = base def forward(self): pe = torch.zeros(self.max_sequence_length, self.d_model, dtype=torch.float) # size(max_sequence_length, d_model) exp_1 = torch.arange(self.d_model // 2, dtype=torch.float) # 初始化一半维度,sin位置编码的维度被分为了两部分 exp_value = exp_1 / (self.d_model / 2) alpha = 1 / (self.base ** exp_value) # size(dmodel/2) out = torch.arange(self.max_sequence_length, dtype=torch.float)[:, None] @ alpha[None, :] # size(max_sequence_length, d_model/2) print(out) embedding_sin = torch.sin(out) embedding_cos = torch.cos(out) print(embedding_sin) pe[:, 0::2] = embedding_sin # 奇数位置设置为sin pe[:, 1::2] = embedding_cos # 偶数位置设置为cos return pe
旋转位置编码RoPE
-
实现原理
- 前面的PE是绝对位置编码,模型只能感知每个词所处的绝对位置,而无法感知两个词语之间的相对位置。
- RoPE的出发点:通过绝对位置编码的方式实现相对位置编码。
- 我们需要定义一个位置编码函数,可以对词向量q添加绝对位置信息m,得到 qm=f(q,m)
- RoPE希望 qm和 kn之间的点积能够带有相对位置信息(m-n)。
- 建模目标:找到一个函数 f(q,m),使得如下关系成立: f(q,m)⋅f(k,n)=g(q,k,m−n)
-
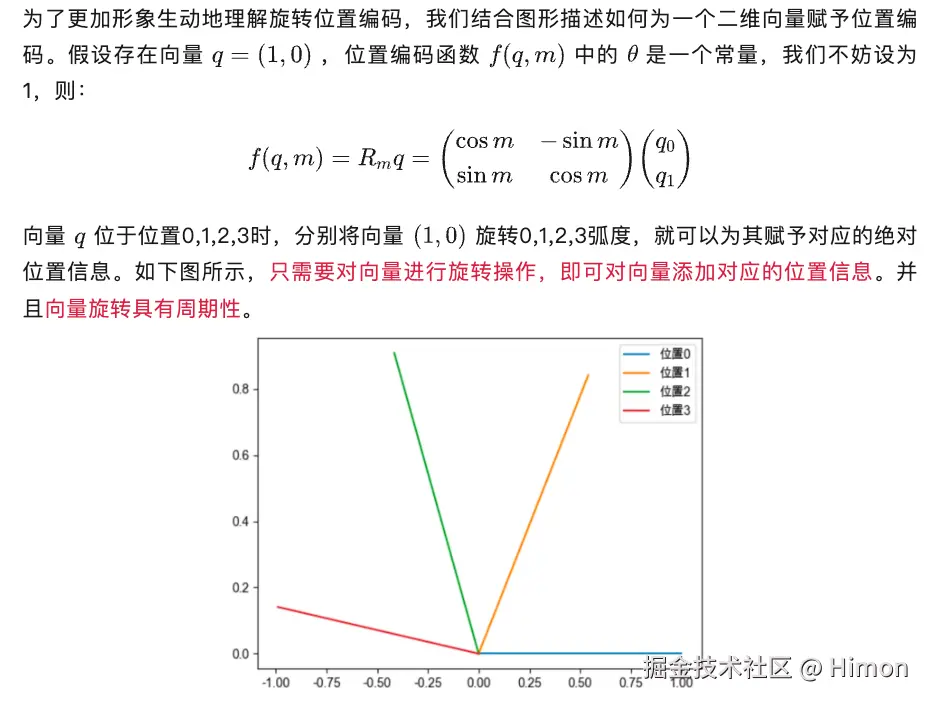
二维情况
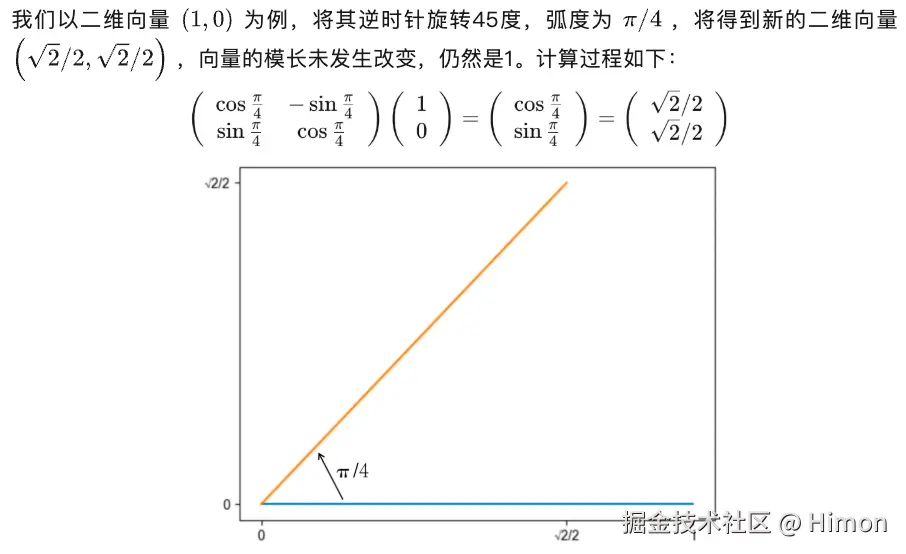
实现方法:采用旋转矩阵 ,当一个二维向量左乘一个旋转矩阵时,该向量即可实现弧度为 θ的逆时针旋转。
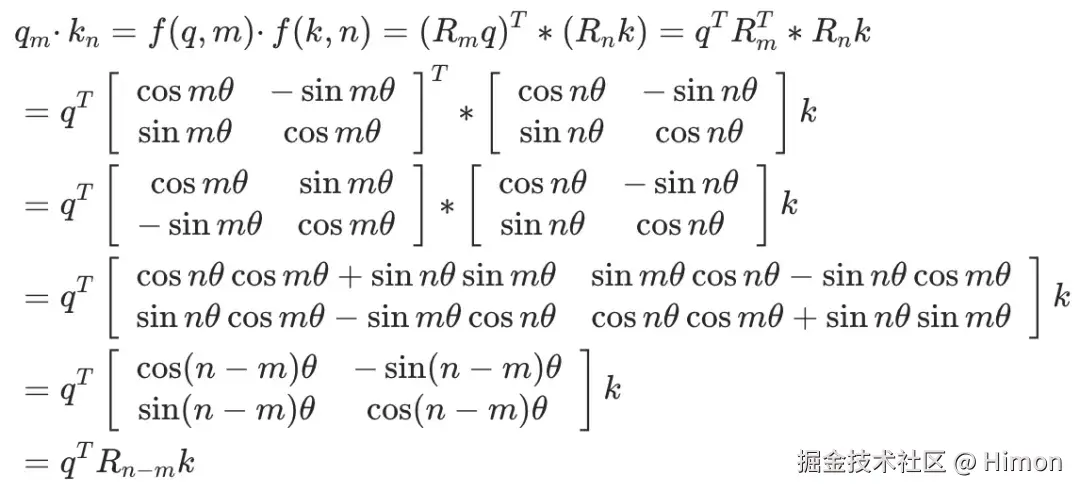
通过推理也可以得到(m-n)的信号量。
一个例子:
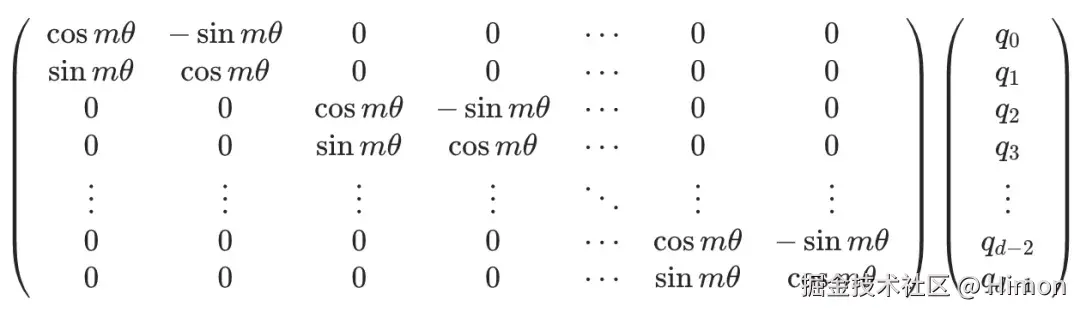
- 多维情况:
分而治之的思路:我们把高维向量,两两一组,分别旋转。
- 实现远程衰减性:
当我们把 θ设为1,随机初始化两个向量q和k,将q固定在0位置,k的位置从0开始逐渐增大,依次计算q和k之间的点积。下图中反映了点积的震荡图,最大的问题是:缺乏了远程衰减性!
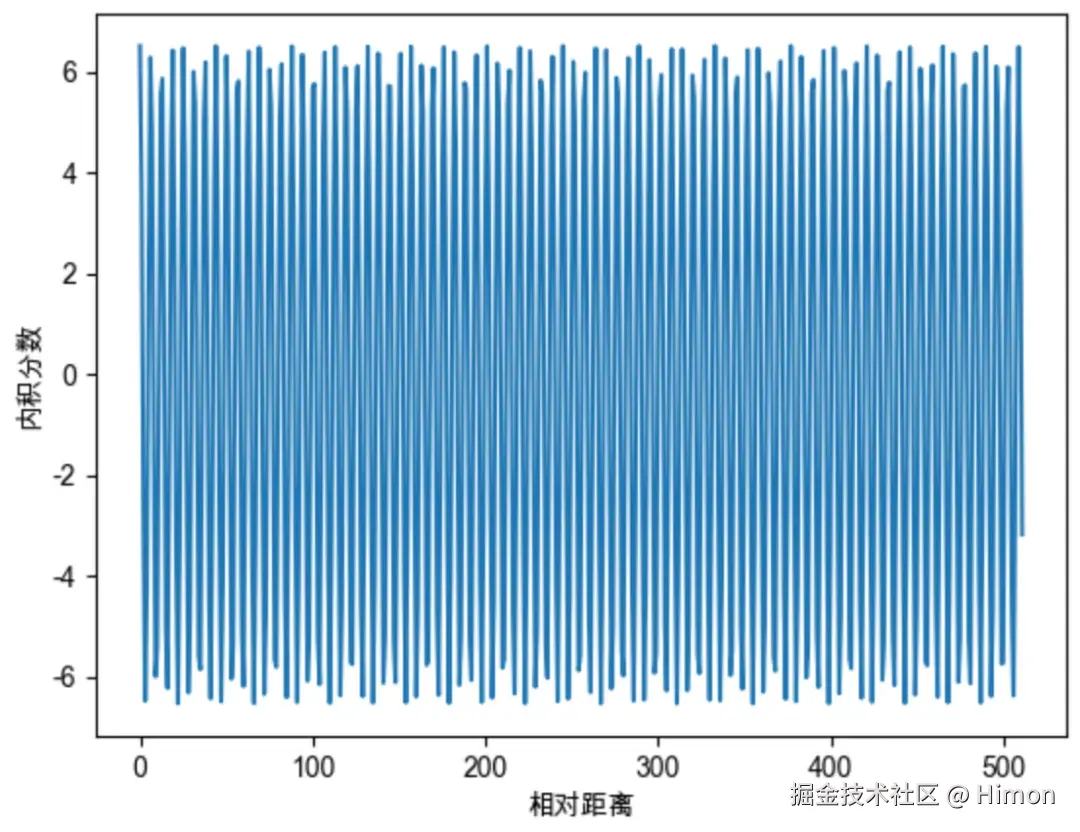
因此借鉴Sinusoidal位置编码,将每个分组的 θ设置为不同的常亮,从而引入远程衰减的性质:
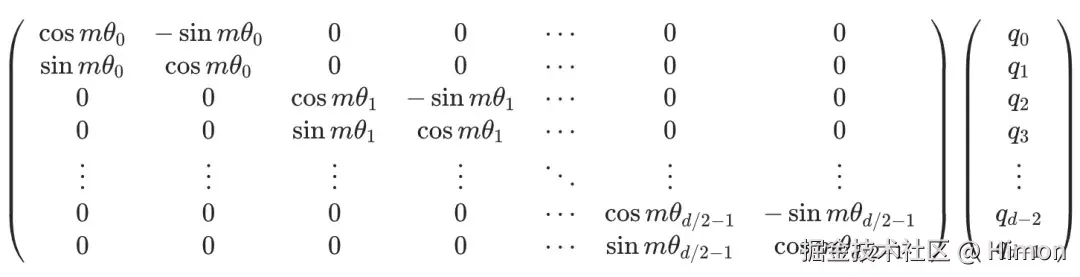
在原始的RoPE中,沿用了Sinusoidal的设置, θ赋值为 10000−2i/d,10000为base,实际上base的值对注意力远程衰减程度有影响:
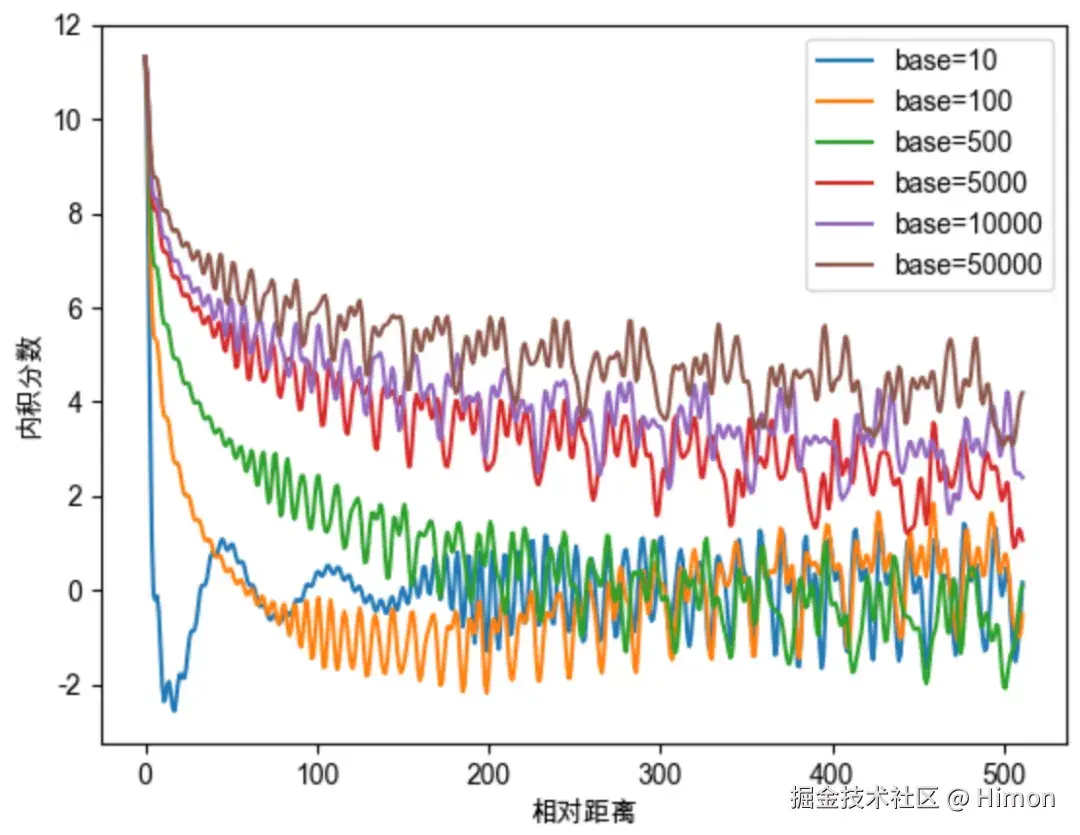
因此对base数值的研究,与大模型的外推能力有关系,如NTK感知插值、动态NTK感知插值等长度外推方法,本质上都是通过改变base值,影响每个位置对应的旋转角度,进而影响模型的位置编码信息。
- 周期性:
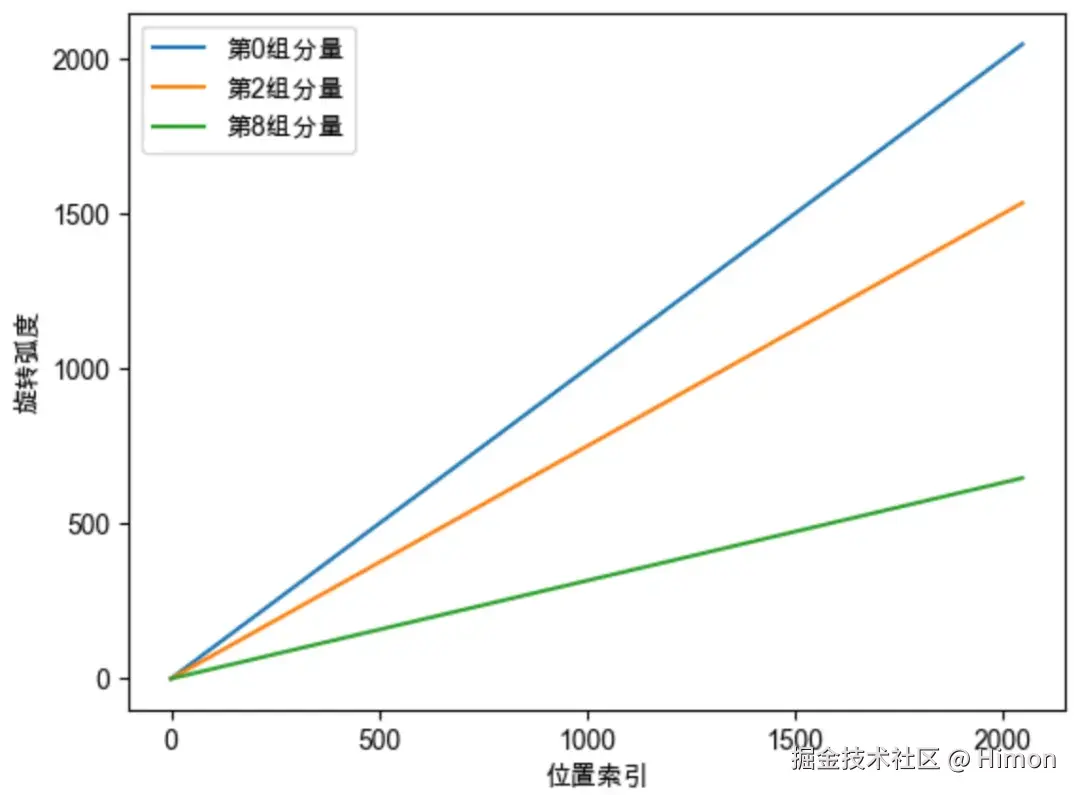
每组向量的旋转具有周期性,旋转一周的弧度是 2π,也就是转一圈又会回到原点,所有RoPE中的向量旋转就像时钟一样,具有周期性,如下图1。但是我们发现,越靠后的分组,向量的旋转速度越慢,如下图当位置位于500时,第0组分量已经旋转500弧度了,第8组分量才旋转158弧度。
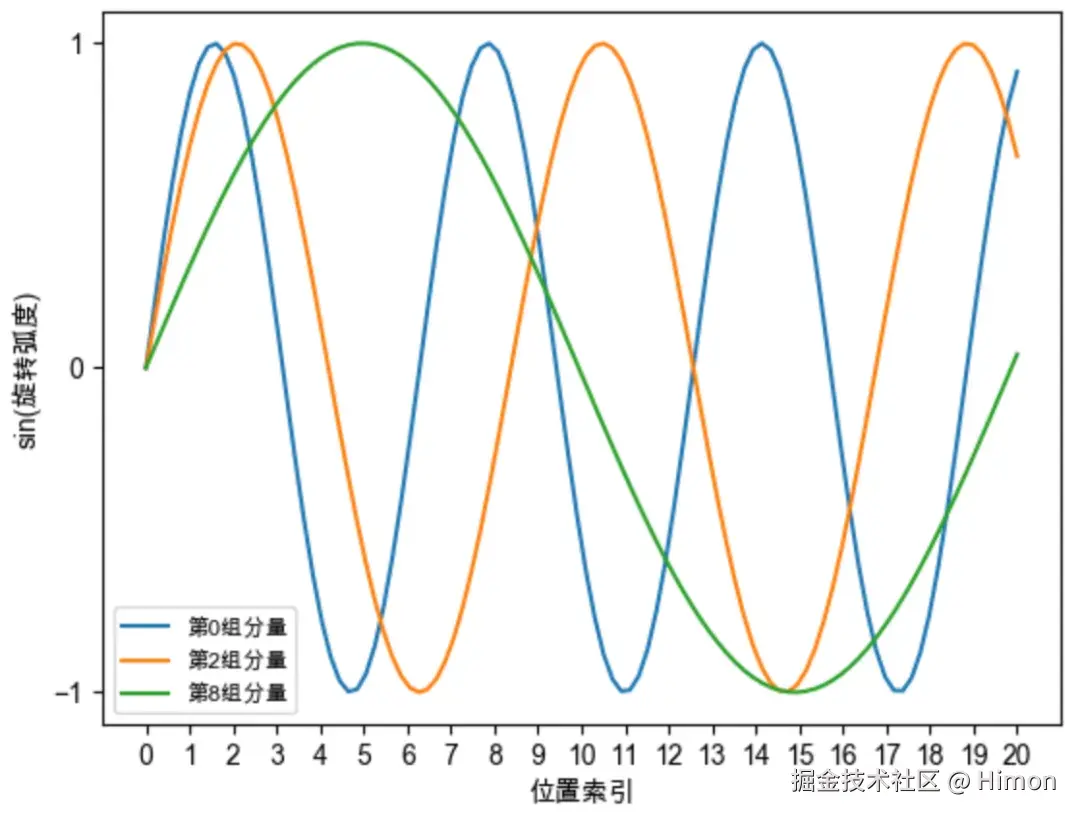
下面图2展示了上述旋转弧度对应的正弦函数,我们可以直观看到:越靠后的分组,它的旋转速度越慢,正弦函数的周期越大,频率越低。
参考:
RoPE的优化-位置插值法
做法很直接:缩小每个位置的旋转弧度,让向量旋转的慢一点,每个位置的旋转弧度变为原来的 L′L ,长度扩大几倍,旋转弧度就缩小几倍。
- 问题点:
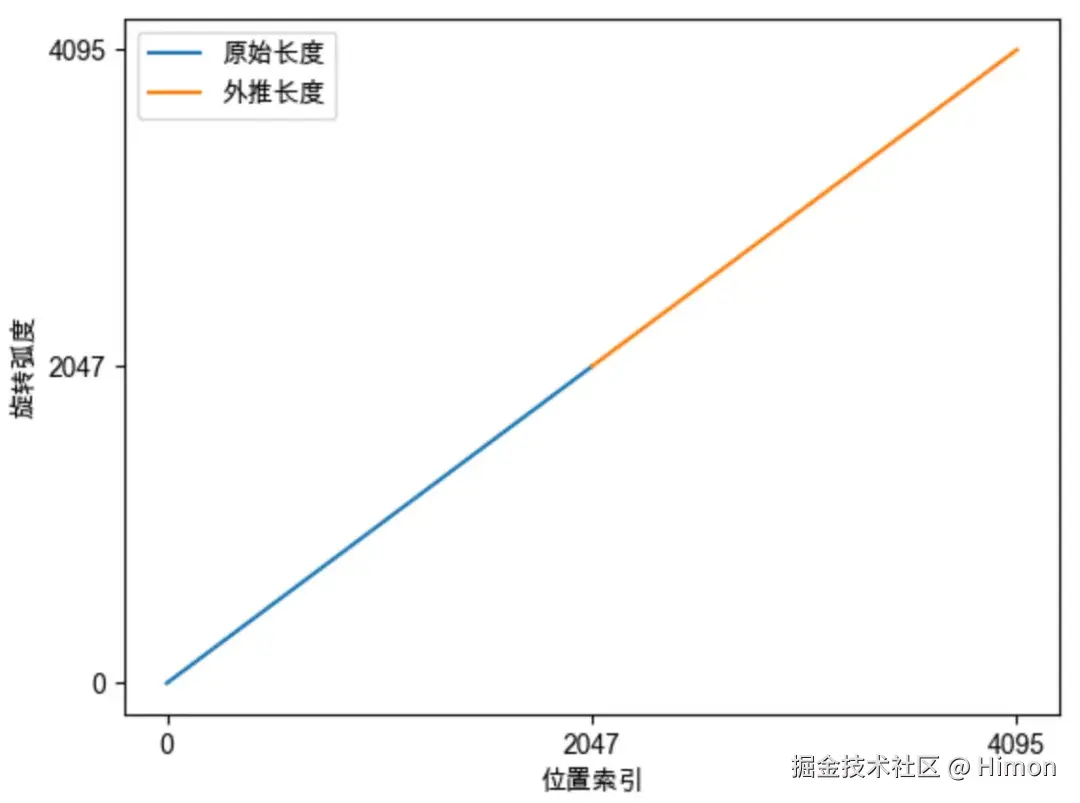
如图一,如果训练阶段sentence长度是0,2048,那么模型只见过0,2048的旋转弧度,没见过2048,4096的旋转弧度,模型难以理解新的旋转弧度,无法正确引入位置信息,导致模型性能下降。
-
优化效果
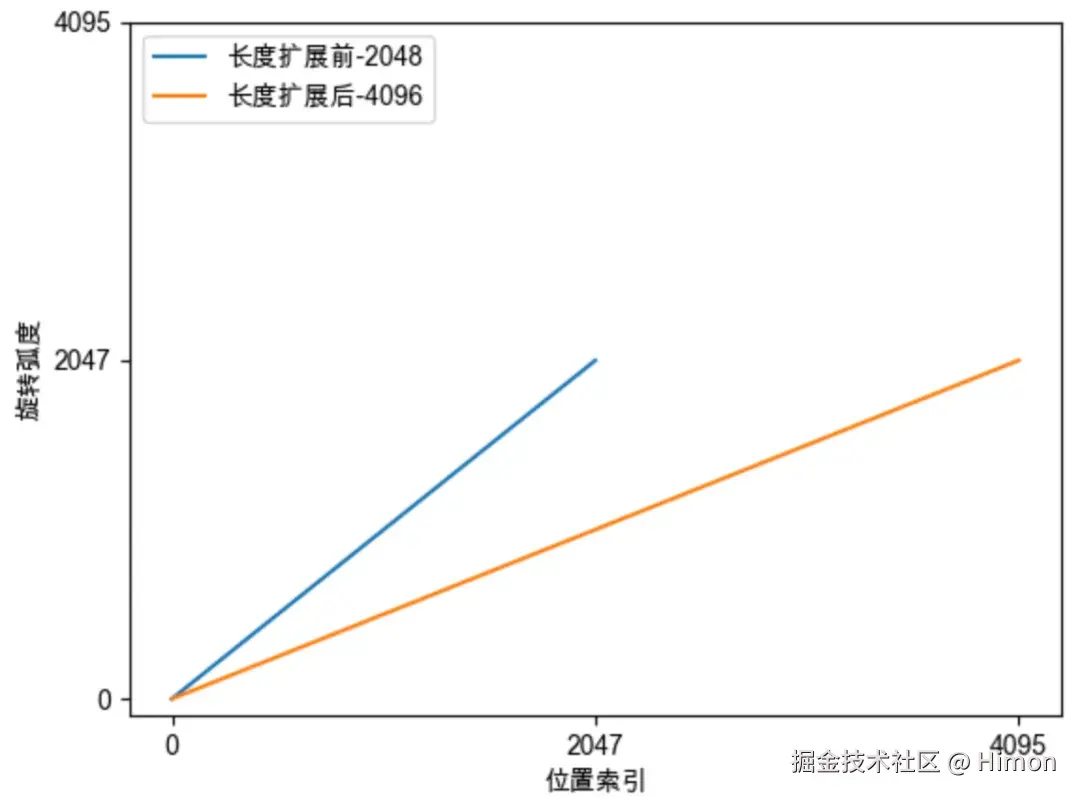
- 图二,展示了第0组分量旋转弧度的变化,位置插值法将0位置的旋转弧度变成原来的一半, 就可以看到2048,4096的旋转弧度了。
-
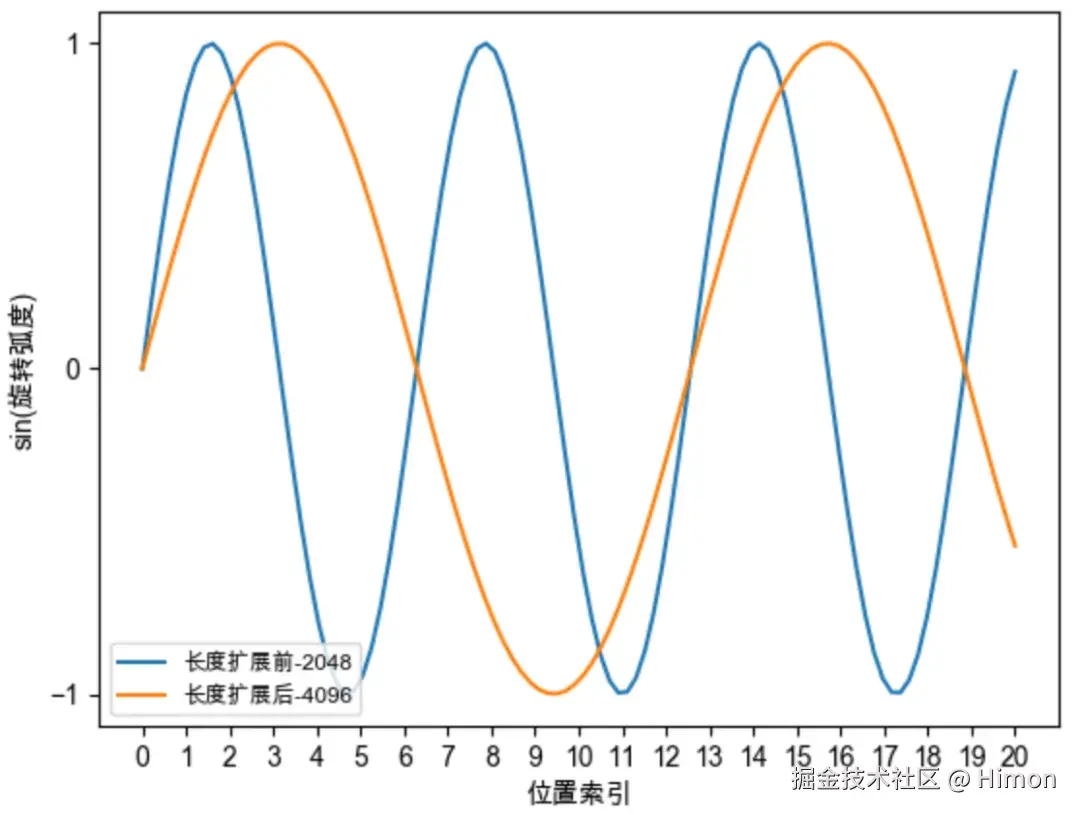
频率变化:
图3,经过位置插值之后,向量旋转变慢了,周期变大,频率变慢。
RoPE优化-NTK感知插值
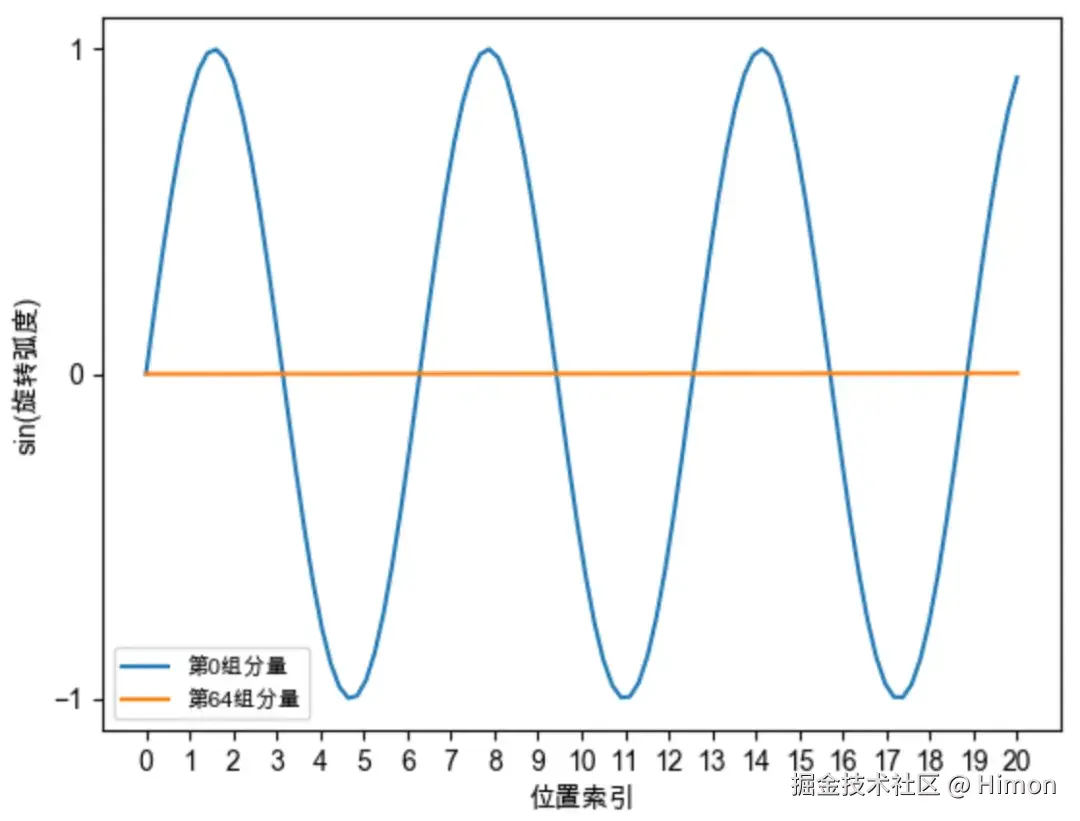
前面介绍过:位置越靠后的分量旋转速度越慢,频率越低,周期越长 ,如下图所示:对于第0组分量,在位置7的时候就已经旋转一周了,而对于第64组分量,在位置2047时,其旋转弧度约为0.2,仍然没有旋转1/4周。我们希望这些高频信息。
NTK感知插值做法:对base加一个缩放因子,进行放大 。保留高频信息,高频分量旋转速度降幅低,低频分量旋转速度降幅高;在高频部分进行外推,低频部分进行内插。
因此,我们将NTK感知插值有效的原因:
-
靠前的分组,在训练环节见过非常多的完整的旋转周期,位置信息得到充分训练,具有较强的外推能力。
-
靠后的分组,在训练环节无法见到完整的旋转周期,或者见到的非常少,训练不充分,外推性能弱。需要进行位置插值。
RoPE优化-NTK-by-parts Interpolation
做法:不改变高频部分,仅仅缩小低频部分的旋转弧度。
RoPE优化-动态NTK感知插值
做法:推理长度小于等于训练长度时,不进行插值,推理长度大于训练长度时,采用NTK动态插值法动态放大base。
RoPE优化-YaRN
问题:通过NTK办法,本质上都是减小旋转弧度,降低旋转速度 ,来达到长度外推的能力。这将导致两个位置之间的旋转弧度差距变小,词向量之间的距离比原来更大,点乘更大,这破坏了模型原始注意力分布。
参考: