本人从0开始学习linux,使用的是韦东山的教程,在跟着课程学习的情况下的所遇到的问题的总结,理论虽枯燥但是是基础。本人将前几章的内容大致学完之后,考虑到后续驱动方面得更多的开始实操,后续的内容将以韦东山教程Linux驱动入门实验班的内容为主,学习其中的代码并手敲。做到锻炼动手能力的同时钻研其中的理论知识点。
摘要:这篇文档主要介绍的是以下几个方面,首先本人模块是自己买的的所以会有所不同,这节内容主要也是讲解超声波模块的使用,以及代码的讲解。以及其中问题的细节部分。
摘要关键词:超声波模块
本文详细介绍以下问题,如果你遇到了以下问题,看看我的方案能否解决。
c
1.原理图参考引脚设置
2.hsr04驱动代码撰写
3.led_test.c应用代码详注
4.代码优化1.原理图参考引脚设置
1.引脚对应原理图
由于本人没有买他的拓展板,只好看原理图来找引脚的分布,然后发现原理图对不上只能看封装图。
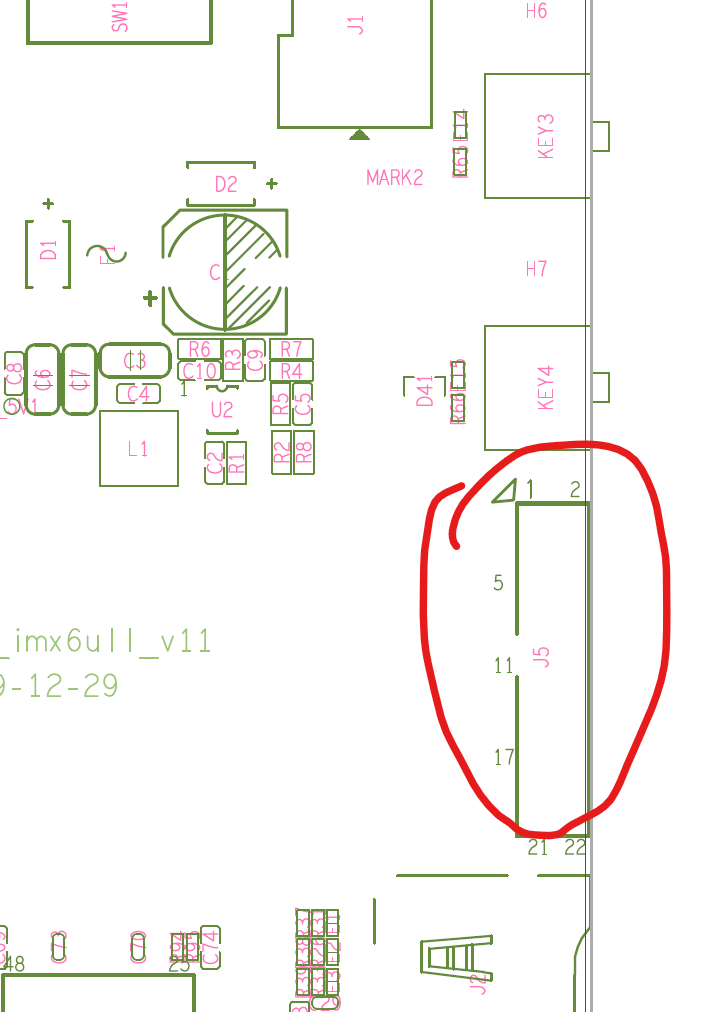
想着确定图片中红色框的引脚位置,找半天没找着j5,说实在的原理图画的有点不好。
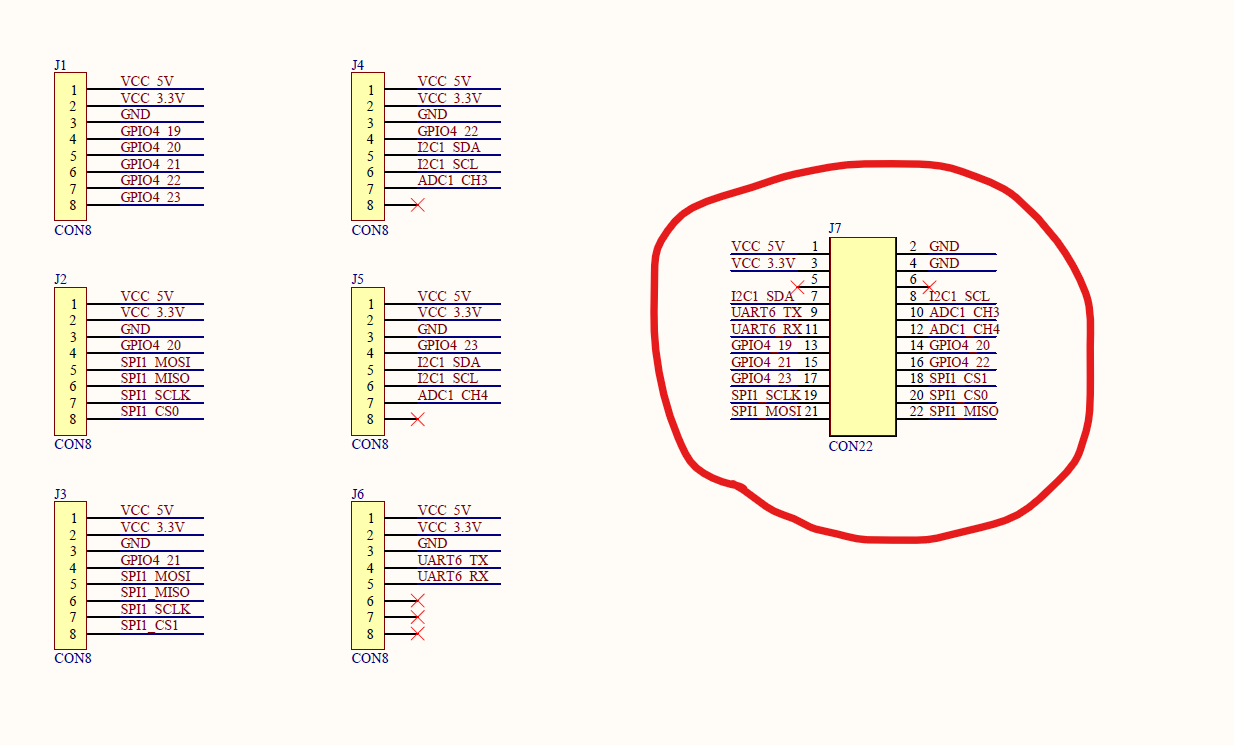
然后也是在另一张原理图中找着了j7,决定测试一下看对应得上吗?

引脚输出5V测试。
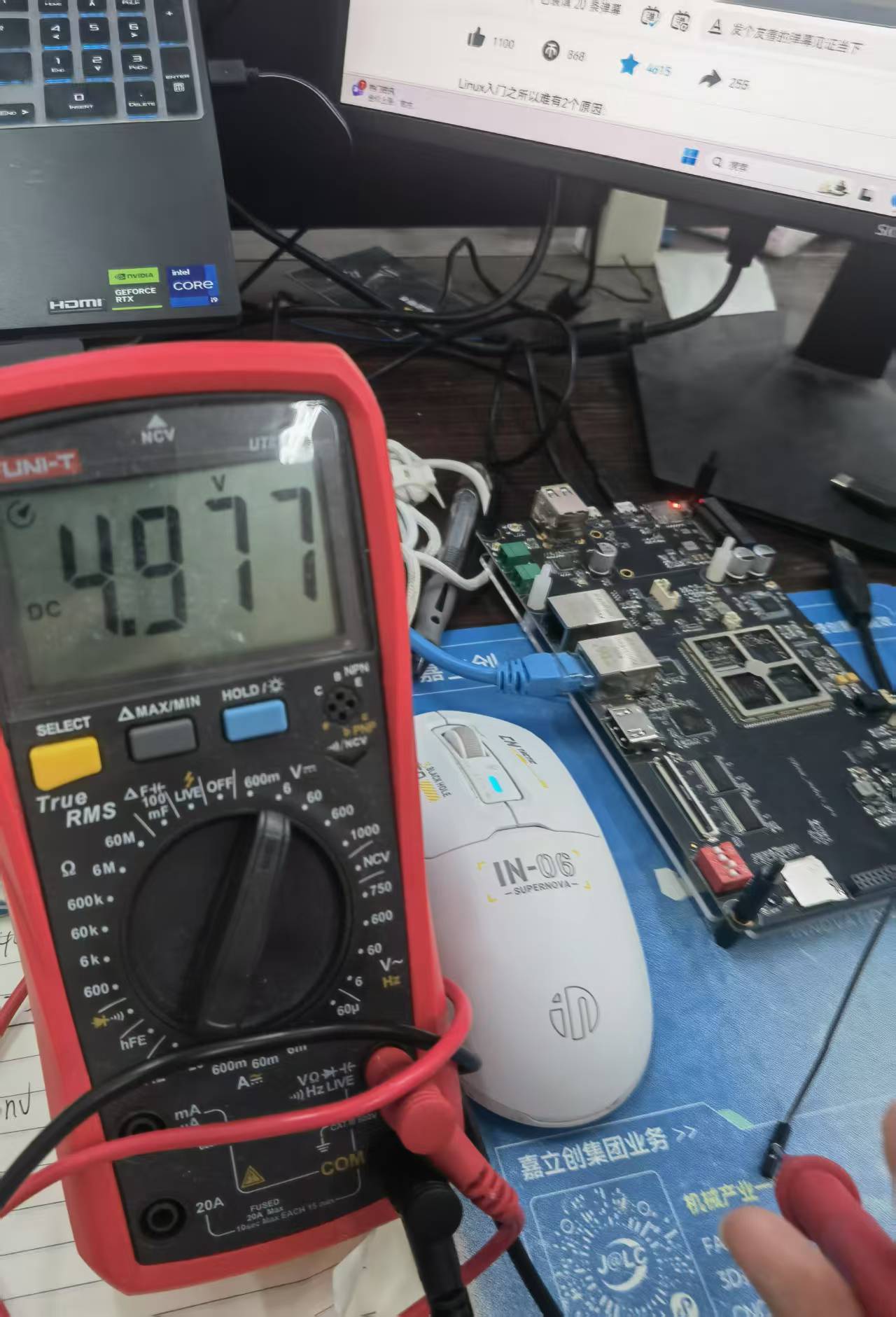
引脚输出3.3V测试。
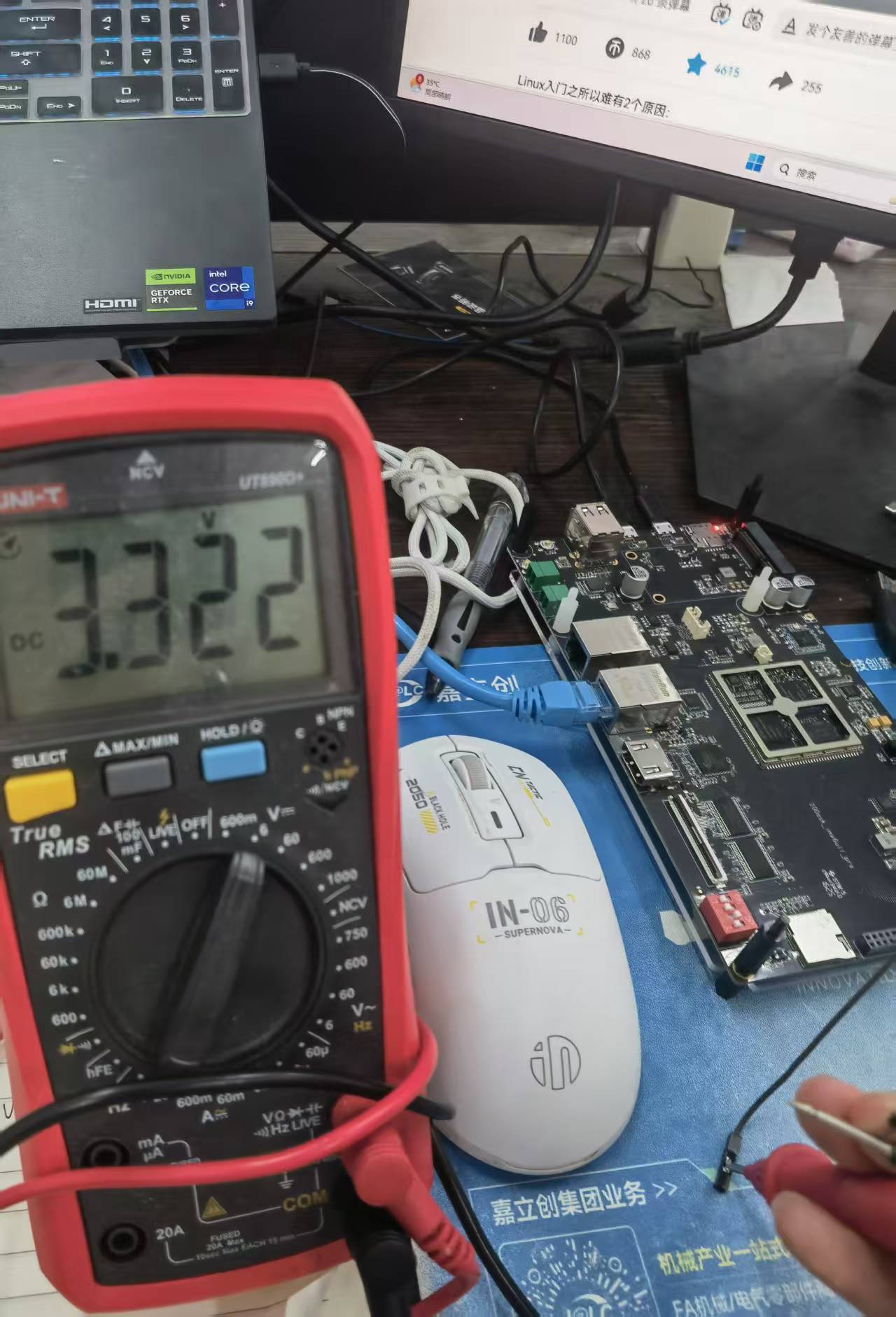
测试引脚功能正常且和引脚编号对应的上那就没问题了。
文档中的trig和echo选择的是GPIO4 19,GPIO4 20
它原理图中的gpio也不是从0开始的从1开始所以,32x3+19=115,32x3+16=116
2.hsr04驱动代码撰写
代码中将有详细注释介绍此部分内容
首先你得大概想好超声波模块是怎么工作的,得想好接收信号和发出信号用啥引脚,需要配置中断和定时器。因为得上下沿触发中断后,开启定时器记录发送到接收的时间。然后是不是得把这个获取的时间发个应用代码让其去计算距离呢?有了以上大概思路就可以开始撰写代码了。
驱动代码1:引脚配置,功能配置
c
#include <linux/timer.h>
#include <linux/delay.h>...
//#include <sys/ioctl.h>
#define CMD_TRIG 100
struct gpio_desc {
int gpio; // GPIO引脚编号(如115、116)
int irq; // 中断号(初始化为0,需动态申请)
char *name; // 引脚功能描述(如"trig"触发、"echo"响应)
int key; // 按键值或状态标识(未初始化,可能用于存储键值)
struct timer_list key_timer; // 内核定时器,用于防抖或超时处理
};
static struct gpio_desc gpios[2] = {
{115, 0, "trig", },
{116, 0, "echo", },
};想好配置哪些GPIO引脚以及它的功能。
2.环形缓冲区
c
/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;
struct fasync_struct *button_fasync;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
static int is_key_buf_empty(void)
{
return (r == w);
}
static int is_key_buf_full(void)
{
return (r == NEXT_POS(w));
}
static void put_key(int key)
{
if (!is_key_buf_full())
{
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static int get_key(void)
{
int key = 0;
if (!is_key_buf_empty())
{
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}3.hsr04驱动部分读取函数以及引脚控制函数
c
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t sr04_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK)) // 非阻塞模式检查
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty()); // 阻塞进程直至条件满足
key = get_key(); // 从环形缓冲区读取数据
err = copy_to_user(buf, &key, 4); // 数据拷贝至用户空间
return 4;
}
/*
* Forward ioctls to the underlying block device.
iocrtl(fd,CMD,ARG)
*/
static long sr04_ioctl(struct file *filp, unsigned int command, unsigned long arg)
{
switch(command)
{
case CMD_TRIG:
{
gpio_set_value(gpios[0].gpio,1);
udelay(20);
gpio_set_value(gpios[0].gpio,0);
}
}
return 0; // 需要在函数结束时返回一个值
}
/* 定义自己的file_operations结构体 */
static struct file_operations sr04_drv = {
.owner = THIS_MODULE,
.read = sr04_drv_read,
.unlocked_ioctl = sr04_ioctl,
};当调用ioctl函数的时候,判断条件。应用程序只需要读取数据,以及控制引脚的信号发射。
4.触发中断函数
这段函数主要是判断接受的上下沿,当接收上沿时val为1,读取时间记录开始时间,当为下降沿时记录终止时间。将时间信息发送给应用程序。
c
static irqreturn_t sr04_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
int val;
static u64 rising_time = 0;
static u64 falling_time = 0;
val = gpio_get_value(gpio_desc->gpio);
if(val)
{ //记录上升沿开始时间
rising_time = ktime_get_ns();
}
else
{
if(rising_time == 0)
{
//printk("mising rising interrupt\n");
return IRQ_HANDLED;
}
//记录下降沿终止时间
falling_time = ktime_get_ns()-rising_time;
//printk("key_timer_expire key %d %d\n", gpio_desc->gpio, val);
rising_time = 0;
put_key(falling_time);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
return IRQ_HANDLED;
}5.入口出口函数
入口函数部分主要是注册引脚,注册trig引脚为输出模式,echo引脚注册的中断模式是 双边沿触发(上升沿和下降沿都会触发中断)。出口函数释放中断,释放引脚即可。
c
/* 在入口函数 */
static int __init sr04_drv_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
/* set pin as output */
// trig pin
err = gpio_request(gpios[0].gpio, gpios[0].name);
if (err < 0) {
printk("can not request gpio %s %d\n", gpios[0].name, gpios[0].gpio);
return -ENODEV;
}
gpio_direction_output(gpios[0].gpio, 0);
// echo pin
gpios[1].irq = gpio_to_irq(gpios[1].gpio);
err = request_irq(gpios[1].irq,sr04_isr,IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING,gpios[1].name,&gpios[1]);
/* 注册file_operations */
major = register_chrdev(0, "sr04", &sr04_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "sr04_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "sr04_class");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "sr04"); /* /dev/100ask_gpio */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit sr04_drv_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "sr04");
// trig pin
gpio_free(gpios[0].gpio);
// echo pin
free_irq(gpios[1].irq, &gpios[1]);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(sr04_drv_init);
module_exit(sr04_drv_exit);
MODULE_LICENSE("GPL");完整驱动代码
c
#include "asm-generic/errno-base.h"
#include "asm-generic/gpio.h"
#include "asm/gpio.h"
#include "asm/uaccess.h"
#include "linux/irqreturn.h"
#include "linux/timekeeping.h"
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
#include <linux/delay.h>
//#include <sys/ioctl.h>
#define CMD_TRIG 100
struct gpio_desc{
int gpio;
int irq;
char *name;
int key;
struct timer_list key_timer;
} ;
static struct gpio_desc gpios[2] = {
{115, 0, "trig", },
{116, 0, "echo", },
};
/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN]; // 存储数据的固定数组,容量为 BUF_LEN(128)
static int r, w; // 读指针(r)和写指针(w),分别指向下一个待读/写位置
struct fasync_struct *button_fasync; // 异步通知机制:用于在数据到达时通知用户空间程序
#define NEXT_POS(x) ((x+1) % BUF_LEN) // 计算下一个指针位置:(x+1) % BUF_LEN,实现缓冲区循环
static int is_key_buf_empty(void) // 判断缓冲区空:读指针 r 等于写指针 w
{
return (r == w);
}
static int is_key_buf_full(void) // 判断缓冲区满:读指针 r 等于写指针的下一个位置(NEXT_POS(w))
{
return (r == NEXT_POS(w));
}
static void put_key(int key) // 写入数据:若缓冲区未满,存入 g_keys[w] 并更新 w
{
if (!is_key_buf_full())
{
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static int get_key(void) // 读取数据:若缓冲区非空,返回 g_keys[r] 并更新 r
{
int key = 0;
if (!is_key_buf_empty())
{
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
// 初始化一个等待队列,用于管理因资源不足而休眠的进程。当按键事件发生时,通过该队列唤醒进程
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
/* 主设备号 */
static int major = 0;
static struct class *gpio_class;
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t sr04_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK)) // 非阻塞模式检查
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty()); // 阻塞进程直至条件满足
key = get_key(); // 从环形缓冲区读取数据
err = copy_to_user(buf, &key, 4); // 数据拷贝至用户空间
return 4;
}
/*
* Forward ioctls to the underlying block device.
iocrtl(fd,CMD,ARG)
*/
static long sr04_ioctl(struct file *filp, unsigned int command, unsigned long arg)
{
switch(command)
{
case CMD_TRIG: // 当调用ioctl函数的时候,判断条件
{
gpio_set_value(gpios[0].gpio,1);
udelay(20);
gpio_set_value(gpios[0].gpio,0);
}
}
return 0; // 需要在函数结束时返回一个值
}
/* 定义自己的file_operations结构体 */
static struct file_operations sr04_drv = {
.owner = THIS_MODULE,
.read = sr04_drv_read,
.unlocked_ioctl = sr04_ioctl,
};
static irqreturn_t sr04_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
int val;
static u64 rising_time = 0;
static u64 falling_time = 0;
val = gpio_get_value(gpio_desc->gpio);
if(val)
{ //记录上升沿开始时间
rising_time = ktime_get_ns();
}
else
{
if(rising_time == 0)
{
//printk("mising rising interrupt\n");
return IRQ_HANDLED;
}
//记录下降沿终止时间
falling_time = ktime_get_ns()-rising_time;
//printk("key_timer_expire key %d %d\n", gpio_desc->gpio, val);
rising_time = 0;
put_key(falling_time);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
return IRQ_HANDLED;
}
/* 在入口函数 */
static int __init sr04_drv_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
/* set pin as output */
// trig pin
err = gpio_request(gpios[0].gpio, gpios[0].name);
if (err < 0) {
printk("can not request gpio %s %d\n", gpios[0].name, gpios[0].gpio);
return -ENODEV;
}
gpio_direction_output(gpios[0].gpio, 0);
// echo pin
gpios[1].irq = gpio_to_irq(gpios[1].gpio);
err = request_irq(gpios[1].irq,sr04_isr,IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING,gpios[1].name,&gpios[1]);
/* 注册file_operations */
major = register_chrdev(0, "sr04", &sr04_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "sr04_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "sr04_class");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "sr04"); /* /dev/100ask_gpio */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit sr04_drv_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "sr04");
// trig pin
gpio_free(gpios[0].gpio);
// echo pin
free_irq(gpios[1].irq, &gpios[1]);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(sr04_drv_init);
module_exit(sr04_drv_exit);
MODULE_LICENSE("GPL");注意你要调用的头文件。
c
book@100ask:~/test/H-SR04$ man 2 ioctl
3.应用代码
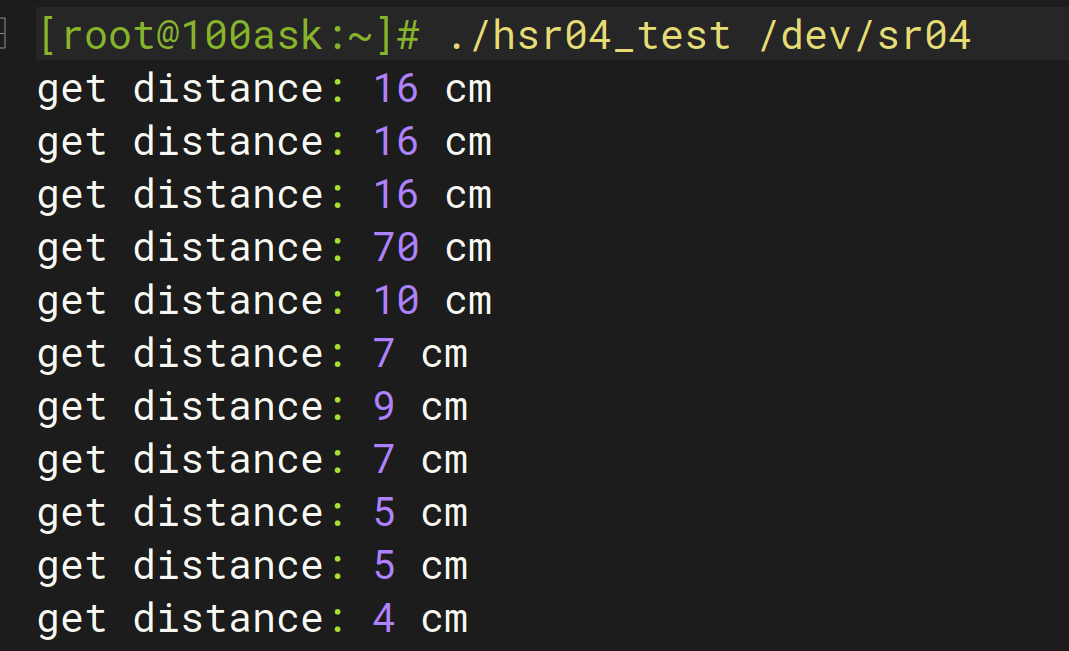
应用代码没有啥好讲的,他就是在不断循环,调用ioctl不断发送超声波信号,然后读取返回的值,每1秒执行1次。
c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
#include <sys/ioctl.h>
static int fd;
#define CMD_TRIG 100
/*
* ./button_test /dev/100ask_button0
*
*/
int main(int argc, char **argv)
{
int val;
struct pollfd fds[1];
int timeout_ms = 5000;
int ret;
int flags;
int i;
/* 1. 判断参数 */
if (argc != 2)
{
printf("Usage: %s <dev>\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
while (1)
{
ioctl(fd,CMD_TRIG);
if (read(fd, &val, 4) == 4)
printf("get distance: %d cm\n", val*17/1000000);
else
printf("while distance err\n");
sleep(1);
}
close(fd);
return 0;
}中断注册查看
c
cat /proc/interrupts 
可以看到echo的中断为边缘触发,引脚编号为20。
c
adb push hsr04_test hsr04_drv.ko root
insmod hsr04_drv.ko
./hsr04_test /dev/sr04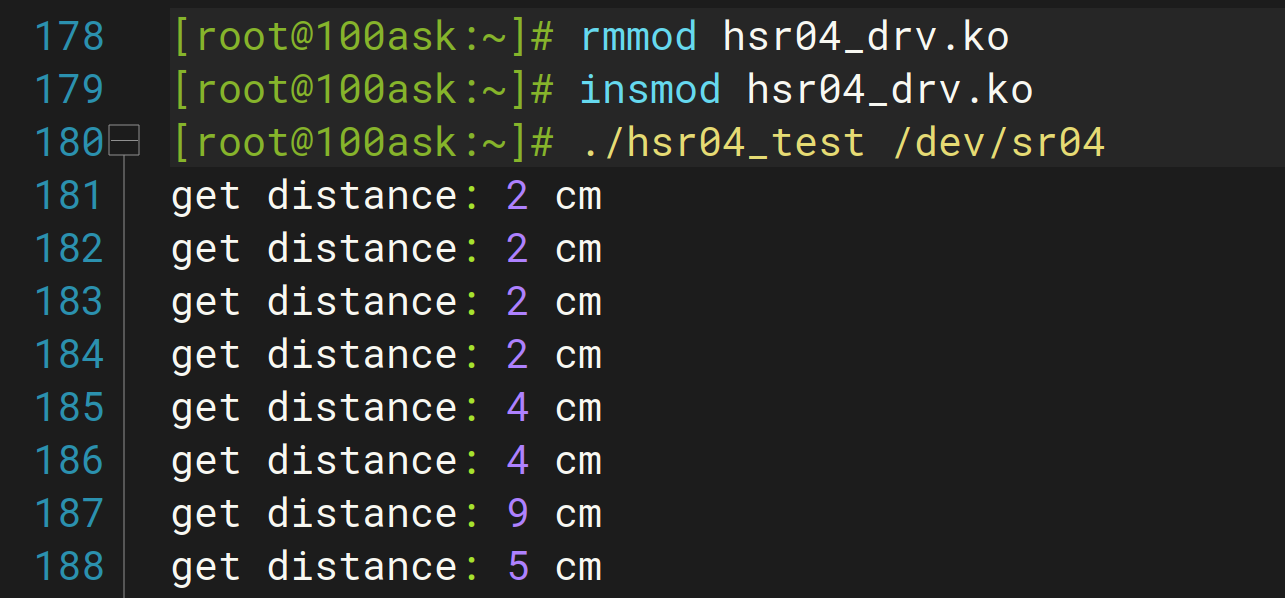
4.代码优化
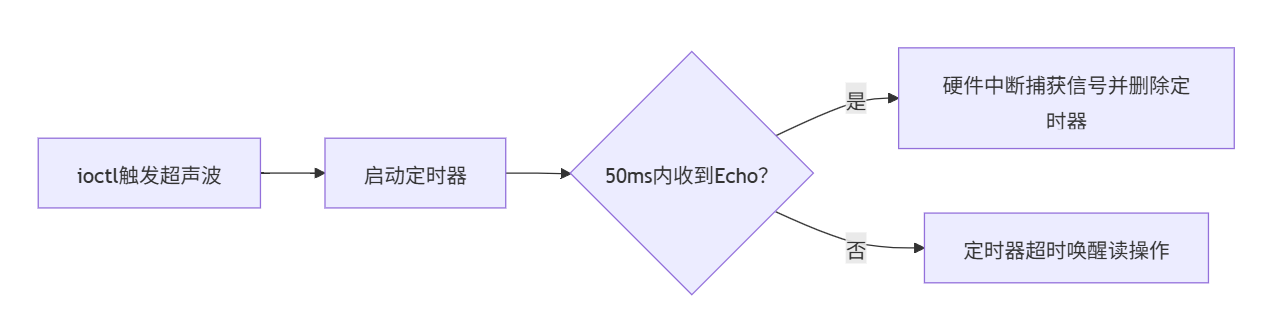
优化部分本人只加了,驱动部分的优化,因为本人认为,应该做中断错误返回等一系列任务应该是驱动部分该干的。
思路部分:首先当未在指定时间内跳出,一直在阻塞的话,定时器中断跳出。以上就是大致思路。
首先得注册定时器在初始化函数中:setup_timer(&gpios1.key_timer,sr04_timer_func, &gpios1);注册定时器,每个引脚好像都有定时器。
c
/* 在入口函数 */
static int __init sr04_drv_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
/* set pin as output */
// trig pin
err = gpio_request(gpios[0].gpio, gpios[0].name);
if (err < 0) {
printk("can not request gpio %s %d\n", gpios[0].name, gpios[0].gpio);
return -ENODEV;
}
gpio_direction_output(gpios[0].gpio, 0);
// echo pin
gpios[1].irq = gpio_to_irq(gpios[1].gpio);
err = request_irq(gpios[1].irq,sr04_isr,IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING,gpios[1].name,&gpios[1]);
// timer
setup_timer(&gpios[1].key_timer,sr04_timer_func, &gpios[1]);
/* 注册file_operations */
major = register_chrdev(0, "sr04", &sr04_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "sr04_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "sr04_class");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "sr04"); /* /dev/100ask_gpio */
return err;
}定时器中断函数
c
static void sr04_timer_func(unsigned long data)
{
put_key(-1);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}定时器中断函数,需要的就是超时后,跳出阻塞。
sr04引脚控制函数
在这部分内容中将,启动定时器开始计时,计时50ms。
c
static long sr04_ioctl(struct file *filp, unsigned int command, unsigned long arg)
{
switch(command)
{
case CMD_TRIG: // 当调用ioctl函数的时候,判断条件
{
gpio_set_value(gpios[0].gpio,1);
udelay(20);
gpio_set_value(gpios[0].gpio,0);
// start timer
mod_timer(&gpios[1].key_timer,jiffies + msecs_to_jiffies(50));
}
}
return 0; // 需要在函数结束时返回一个值
}sr04中断函数中,若正常执行的话,结束定时器中断,删除定时器,否则会执行以上定时器中断函数的内容。
c
static irqreturn_t sr04_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
int val;
static u64 rising_time = 0;
static u64 falling_time = 0;
val = gpio_get_value(gpio_desc->gpio);
if(val)
{ //记录上升沿开始时间
rising_time = ktime_get_ns();
}
else
{
if(rising_time == 0)
{
//printk("mising rising interrupt\n");
return IRQ_HANDLED;
}
// stop timer
del_timer(&gpios[1].key_timer);
//记录下降沿终止时间
falling_time = ktime_get_ns()-rising_time;
//printk("key_timer_expire key %d %d\n", gpio_desc->gpio, val);
rising_time = 0;
put_key(falling_time);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
return IRQ_HANDLED;
}驱动终止函数,删除各种进程模块包括定时器。
c
static void __exit sr04_drv_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "sr04");
// trig pin
gpio_free(gpios[0].gpio);
// echo pin
free_irq(gpios[1].irq, &gpios[1]);
del_timer(&gpios[1].key_timer);
}升级版完整代码
驱动代码:
c
#include "asm-generic/errno-base.h"
#include "asm-generic/gpio.h"
#include "asm/gpio.h"
#include "asm/uaccess.h"
#include "linux/irqreturn.h"
#include "linux/jiffies.h"
#include "linux/timekeeping.h"
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
#include <linux/delay.h>
//#include <sys/ioctl.h>
#define CMD_TRIG 100
struct gpio_desc{
int gpio;
int irq;
char *name;
int key;
struct timer_list key_timer;
} ;
static struct gpio_desc gpios[2] = {
{115, 0, "trig", },
{116, 0, "echo", },
};
/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN]; // 存储数据的固定数组,容量为 BUF_LEN(128)
static int r, w; // 读指针(r)和写指针(w),分别指向下一个待读/写位置
struct fasync_struct *button_fasync; // 异步通知机制:用于在数据到达时通知用户空间程序
#define NEXT_POS(x) ((x+1) % BUF_LEN) // 计算下一个指针位置:(x+1) % BUF_LEN,实现缓冲区循环
static int is_key_buf_empty(void) // 判断缓冲区空:读指针 r 等于写指针 w
{
return (r == w);
}
static int is_key_buf_full(void) // 判断缓冲区满:读指针 r 等于写指针的下一个位置(NEXT_POS(w))
{
return (r == NEXT_POS(w));
}
static void put_key(int key) // 写入数据:若缓冲区未满,存入 g_keys[w] 并更新 w
{
if (!is_key_buf_full())
{
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static int get_key(void) // 读取数据:若缓冲区非空,返回 g_keys[r] 并更新 r
{
int key = 0;
if (!is_key_buf_empty())
{
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
// 初始化一个等待队列,用于管理因资源不足而休眠的进程。当按键事件发生时,通过该队列唤醒进程
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
/* 主设备号 */
static int major = 0;
static struct class *gpio_class;
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t sr04_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK)) // 非阻塞模式检查
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty()); // 阻塞进程直至条件满足
key = get_key(); // 从环形缓冲区读取数据
if(key == -1) return -ENODATA;
err = copy_to_user(buf, &key, 4); // 数据拷贝至用户空间
return 4;
}
/*
* Forward ioctls to the underlying block device.
iocrtl(fd,CMD,ARG)
*/
static long sr04_ioctl(struct file *filp, unsigned int command, unsigned long arg)
{
switch(command)
{
case CMD_TRIG: // 当调用ioctl函数的时候,判断条件
{
gpio_set_value(gpios[0].gpio,1);
udelay(20);
gpio_set_value(gpios[0].gpio,0);
// start timer
mod_timer(&gpios[1].key_timer,jiffies + msecs_to_jiffies(50));
}
}
return 0; // 需要在函数结束时返回一个值
}
/* 定义自己的file_operations结构体 */
static struct file_operations sr04_drv = {
.owner = THIS_MODULE,
.read = sr04_drv_read,
.unlocked_ioctl = sr04_ioctl,
};
static irqreturn_t sr04_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
int val;
static u64 rising_time = 0;
static u64 falling_time = 0;
val = gpio_get_value(gpio_desc->gpio);
if(val)
{ //记录上升沿开始时间
rising_time = ktime_get_ns();
}
else
{
if(rising_time == 0)
{
//printk("mising rising interrupt\n");
return IRQ_HANDLED;
}
// stop timer
del_timer(&gpios[1].key_timer);
//记录下降沿终止时间
falling_time = ktime_get_ns()-rising_time;
//printk("key_timer_expire key %d %d\n", gpio_desc->gpio, val);
rising_time = 0;
put_key(falling_time);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
return IRQ_HANDLED;
}
static void sr04_timer_func(unsigned long data)
{
put_key(-1);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
/* 在入口函数 */
static int __init sr04_drv_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
/* set pin as output */
// trig pin
err = gpio_request(gpios[0].gpio, gpios[0].name);
if (err < 0) {
printk("can not request gpio %s %d\n", gpios[0].name, gpios[0].gpio);
return -ENODEV;
}
gpio_direction_output(gpios[0].gpio, 0);
// echo pin
gpios[1].irq = gpio_to_irq(gpios[1].gpio);
err = request_irq(gpios[1].irq,sr04_isr,IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING,gpios[1].name,&gpios[1]);
// timer
setup_timer(&gpios[1].key_timer,sr04_timer_func, &gpios[1]);
/* 注册file_operations */
major = register_chrdev(0, "sr04", &sr04_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "sr04_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "sr04_class");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "sr04"); /* /dev/100ask_gpio */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit sr04_drv_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "sr04");
// trig pin
gpio_free(gpios[0].gpio);
// echo pin
free_irq(gpios[1].irq, &gpios[1]);
del_timer(&gpios[1].key_timer);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(sr04_drv_init);
module_exit(sr04_drv_exit);
MODULE_LICENSE("GPL");