1 单选题(每题 2 分,共 30 分)
第1题 已知小写字母 b 的ASCII码为98,下列C++代码的输出结果是( )。
- #include <iostream>
- using namespace std;
- int main() {
- char a = 'b' ^ 4;
- cout << a;
- return 0;
- }
A. b B. bbbb C. f D. 102
解析:答案C。'b'为字符型,等人价整型98,'b' ^ 4等价98 ^ 4 = 0b01100010 ^ 0b00000100 = 0b01100110 = 102。char a表示a为字符型,102将转换为字符'f'。所以C.正确。故选C。
第2题 已知 a 为 int 类型变量, p 为 int * 类型变量,下列赋值语句不符合语法的是( )。
A. *(p + a) = *p; B. *(p - a) = a; C. p + a = p; D. p = p + a;
解析:答案C。本题考察的是指针运算的合法性 ,关键点在于指针变量是否可以用于赋值表达式的左侧 。A. *(p + a) = *p; 合法 :*(p + a) 是对指针 p 偏移 a 后的地址解引用,并赋值 *p 的值,这是合法的指针运算和赋值操作。B. *(p - a) = a; 合法 :*(p - a) 是对指针 p 偏移 -a 后的地址解引用,并赋值为 a,这也是合法的指针运算和赋值操作。C.p + a = p; 非法 :p + a 是一个临时计算的指针值 ( 地址值 ) ,不能出现在赋值语句的左侧(即不能作为左值),编译器会报错,因为表达式 p + a 的结果是不可修改的临时对象 。D. p = p + a; 合法 :对指针变量 p 进行偏移运算(p + a),并将结果赋值给 p,这是合法的指针运算和赋值操作。故选C。
第3题 下列关于C++类的说法,错误的是( )。
A. 如需要使用基类的指针释放派生类对象,基类的析构函数应声明为虚析构函数。
B. 构造派生类对象时,只调用派生类的构造函数,不会调用基类的构造函数。
C. 基类和派生类分别实现了同一个虚函数,派生类对象仍能够调用基类的该方法。
D. 如果函数形参为基类指针,调用时可以传入派生类指针作为实参。
解析:答案B。若基类析构函数未声明为虚析构函数 ,通过基类指针释放派生类对象时会导致内存泄漏 (仅调用基类析构函数,派生类部分未被释放),虚析构函数 确保多态性析构的正确调用,所以A.正确。构造派生类对象时,会先调用基类构造函数,再调用派生类构造函数 ,若基类未定义默认构造函数,派生类构造时必须显式初始化基类,所以B.错误。派生类通过 base:: 显式调用基类虚函数(如 base::Method()),或通过基类指针/引用调用(覆盖后仍可访问基类实现),基类指针可以指向派生类对象 (多态性),因此传入派生类指针作为基类指针的实参是合法的,所以D.正确。故选B。
第4题 下列C++代码的输出是( )。
- #include <iostream>
- using namespace std;
- int main() {
- int arr5 = {2, 4, 6, 8, 10};
- int * p = arr + 2;
- cout << p3 << endl;
- return 0;
- }
A. 6 B. 8
C. 编译出错,无法运行。 D. 不确定,可能发生运行时异常。
解析:答案D。arr是数组arr的首地址,即地址指向下标0,也就是元素2这个位置,int *p = arr + 2,指针p指向arr+2,即指向下标2,也就是元素6这个位置,这个位置相当于p0,所以p3已超arr的范围,结果不确定,所以D.正确。故选D。
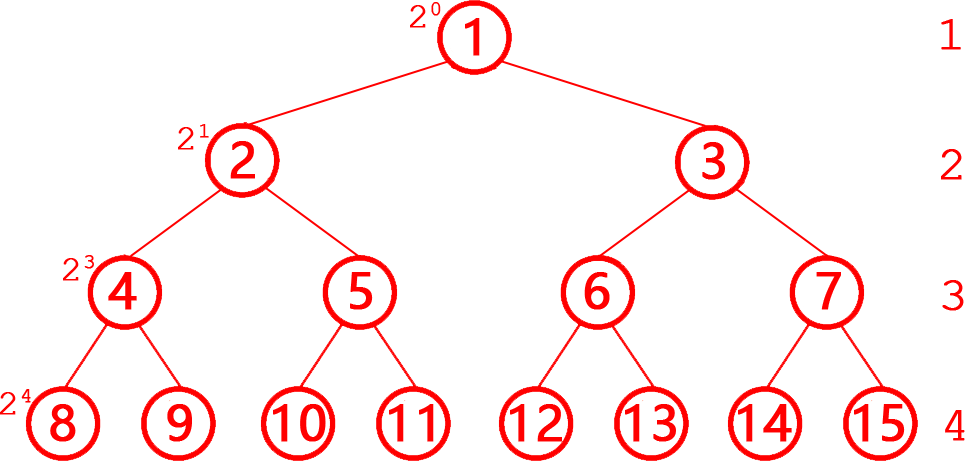
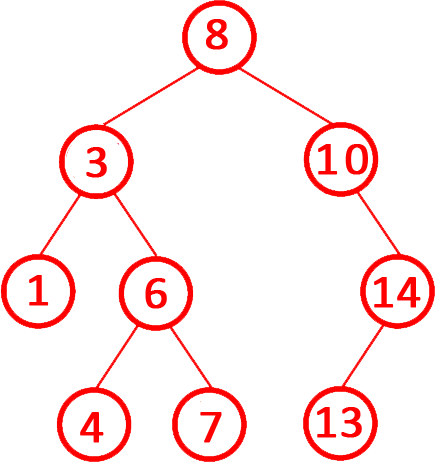
第5题 假定只有一个根节点的树的深度为1,则一棵有N个节点的完全二叉树,则树的深度为( )。
A. ⌊log₂(N)⌋+1 B. ⌊log₂(N)⌋ C. ⌈log₂(N)⌉ D. 不能确定
解析:答案A。完全二叉树每行的第1个节点的编号=为2层号-1,层号=log₂编号+1,对整层的其他节点:层号=⌊log₂编号⌋+1,对最后一层就是深度(参考下图),所以对一棵有N 个节点的完全二叉树,如根节点的树的深度为1,则树的深度=⌊log₂N⌋+1。故选A。
第6题 对于如下图的二叉树,说法正确的是( )。
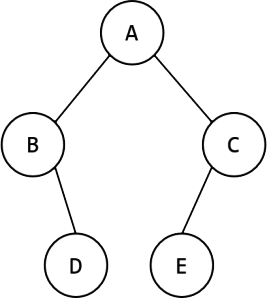
A. 先序遍历是 ABDEC 。 B. 中序遍历是 BDACE 。
C. 后序遍历是 DBCEA 。 D. 广度优先遍历是 ABCDE 。
解析:答案D。先序遍历是根-左树-右树,中序遍历是左树-根-右树,后序遍历是左树-右树-根,广度优先遍历是按层从上到下,每层从左到右。对本题图中二叉树:先序遍历是ABDCE,A.错误;中序遍历是BDAEC,B.错误;后序遍历是DBECA,C.错误,广度优先遍历是ABCDE,D.正确。故选D。
第7题 图的存储和遍历算法,下面说法错误的是( )。
A. 图的深度优先遍历须要借助队列来完成。
B. 图的深度优先遍历和广度优先遍历对有向图和无向图都适用。
C. 使用邻接矩阵存储一个包含𝑣个顶点的有向图,统计其边数的时间复杂度为𝑂(𝑣²)。
D. 同一个图分别使用出边邻接表和入边邻接表存储,其边结点个数相同。
解析:答案A。深度优先遍历(DFS)通常使用栈 (递归或显式栈)实现,而广度优先遍历(BFS)才需要队列,所以A.错误。两种遍历算法均适用于有向图和无向图,仅访问顺序和实现细节可能不同,所以正确。包含𝑣个顶点的有向图的邻接矩阵需要遍历整个𝑣×𝑣矩阵才能统计边数,时间复杂度为 𝑂(𝑣²),C.正确。无论出边还是入边邻接表,每条边均被存储一次,仅方向不同,边结点总数相同,D.正确。故选A。
第8题 一个连通的简单有向图,共有28条边,则该图至少有( )个顶点。
A. 5 B. 6 C. 7 D. 8
解析:答案B。对于连通的简单有向图,若共有28条边,其最少顶点数的计算逻辑如下:
对于简单有向图,若顶点数为𝑛,则最大边数为𝑛 (𝑛−1)(每个顶点与其他 𝑛−1 个顶点各有一条有向边)。题目要求边数28,需满足𝑛 (𝑛−1)≥28,即𝑛²−𝑛−28 ≥ 0,解方程 ≈5.82,因此最小的𝑛 =6。验证:当n=8时,8×7=56≥28;当n=7时,7×6=42≥28;n=6 时,6×5=30≥28;当n=5 时,5×4=20<28(不满足)。因此,最少需要6个顶点才能容纳28条边且保持连通性。连通性约束:连通有向图需保证至少n−1 条边(如生成树结构),但题目边数(28)远大于此下限,故顶点数由边数上限决定为6。故选B。
≈5.82,因此最小的𝑛 =6。验证:当n=8时,8×7=56≥28;当n=7时,7×6=42≥28;n=6 时,6×5=30≥28;当n=5 时,5×4=20<28(不满足)。因此,最少需要6个顶点才能容纳28条边且保持连通性。连通性约束:连通有向图需保证至少n−1 条边(如生成树结构),但题目边数(28)远大于此下限,故顶点数由边数上限决定为6。故选B。
第9题 以下哪个方案不能合理解决或缓解哈希表冲突( )。
A. 在每个哈希表项处,使用不同的哈希函数再建立一个哈希表,管理该表项的冲突元素。
B. 在每个哈希表项处,建立二叉排序树,管理该表项的冲突元素。
C. 使用不同的哈希函数建立额外的哈希表,用来管理所有发生冲突的元素。
D. 覆盖发生冲突的旧元素。
解析:答案D。在每个哈希表项处,用不同哈希函数再建一个哈希表管理冲突元素,但嵌套哈希表会显著增加空间复杂度,且二次哈希函数的设计需保证不引发新的冲突,实现复杂,A.可以解决,但不算很理想。在每个哈希表项处建立二叉排序树管理冲突元素,这是链地址法的优化变种,可提高查询效率,B.可以解决。使用不同哈希函数建额外哈希表管理所有冲突元素,类似"再哈希法",通过备用哈希函数分散冲突,是常见策略之一,可以解决。直接覆盖冲突的旧元素,会导致数据丢失,违反哈希表完整性原则,无法解决冲突,所以D.不能解决。故选D。
第10题 以下关于动态规划的说法中,错误的是( )。
A. 动态规划方法通常能够列出递推公式。
B. 动态规划方法的时间复杂度通常为状态的个数。
C. 动态规划方法有递推和递归两种实现形式。
D. 对很多问题,递推实现和递归实现动态规划方法的时间复杂度相当。
解析:答案B。动态规划的核心是通过递推公式(状态转移方程)描述子问题与原问题的关系,所以A.正确。动态规划的时间复杂度取决于状态数量 与每个状态的计算复杂度 ,通常为O (状态数×单状态计算复杂度),所以B.错误。递归实现 (自顶向下):通过记忆化存储避免重复计算,如斐波那契数列的递归解法;递推实现 (自底向上):通过迭代填充状态表,如数塔问题的递推解法,所以C.正确。两种实现的时间复杂度通常相同,虽然递归会导致指数级别的时间复杂度,因为它会计算许多重复的子问题,但动态规划会存储子问题的结果,来降低复杂度,使其变成多项式级别,但递归可能因函数调用栈产生额外开销,所以D.正确。故选B。
第11题 下面程序的输出为( )。
- #include < iostream>
- using namespace std;
- int rec_fib100;
- int fib(int n) {
- if (n <= 1)
- return n;
- if (rec_fibn == 0)
- rec_fibn = fib(n - 1) + fib(n - 2);
- return rec_fibn;
- }
- int main() {
- cout << fib(6) << endl;
- return 0;
- }
A. 8 B. 13 C. 64 D. 结果是随机的
解析:答案A。本题程序实现了一个带记忆化( Memoization )的递归斐波那契数列计算 。斐波那契数列定义:fib(0) = 0,fib(1) = 1;fib(n) = fib(n-1) + fib(n-2)(当 n > 1)。
全局数组 rec_fib 用于存储已计算的斐波那契数,避免重复递归调用。若 rec_fibn 未被计算过(初始为0),则递归计算并存储结果。**计算结果:**fib(6)=fib(5)+ fib(4)=5+3=8。
具体递归展开如下:
fib(6) → fib(5) + fib(4) → 5 + 3 = 8
fib(5) → fib(4) + fib(3) → 3 + 2 = 5
fib(4) → fib(3) + fib(2) → 2 + 1 = 3
fib(3) → fib(2) + fib(1) → 1 + 1 = 2
fib(2) → fib(1) + fib(0) → 1 + 0 = 1
所以A.正确。故选A。
第 12 题 下面程序的时间复杂度为( )。
- int rec_fibMAX_N;
- int fib(int n) {
- if (n <= 1)
- return n;
- if (rec_fibn == 0)
- rec_fibn = fib(n - 1) + fib(n - 2);
- return rec_fibn;
- }
A. O (2ⁿ ) B. O (𝜙ⁿ ), C. O (n ²) D. O (n)
C. O (n ²) D. O (n)
解析:答案D。本题程序使用了记忆化递归( Memoization ) 来计算斐波那契数列,rec_fibn 数组存储已经计算过的斐波那契数,避免重复计算。
每个 fib(k)(k ∈ 0, n)仅计算一次 ,后续直接查表返回,时间复杂度 **O(1)**。
计算 fib(n) 时,会依次计算 fib(n-1), fib(n-2), ..., fib(0),每个值只计算一次。
总共需要 n****次计算 (线性增长),因此时间复杂度为 O (n)。普通递归的时间复杂度是 *O* (2ⁿ),因为会重复计算大量子问题。记忆化优化后,递归树退化成线性计算链 ,复杂度降为 O (n)**。普通递归时间复杂度为O (2ⁿ)(或更精确的O (𝜙ⁿ ),𝜙 = (√5 + 1)/2 ≈ 1.618),所以A.、B.错误。无O (n²)这种情况,C.错误。故选D。
第13题 下面 search 函数的平均时间复杂度为( )。
- int search(int n, int * p, int target) {
- int low = 0, high = n;
- while (low < high) {
- int middle = (low + high) / 2;
- if (target == pmiddle) {
- return middle;
- } else if (target > pmiddle) {
- low = middle + 1; }
- else {
- high = middle;
- }
- }
- return -1;
- }
A. O (n log(n )) B. O (n ) C. O (log(n ) D. O(1)
解析:答案C。本题的 search 函数明显是二分查找( Binary Search ) 算法,其平均时间复杂度为 O (log n)。每次循环将搜索范围缩小一半(middle = (low + high)/2),通过比较 target 与中间值决定向左或向右继续搜索;若找到目标值则直接返回索引(第5-6行),否则调整 low 或 high 缩小范围(第7-11行);每次迭代将数据规模n减半,最坏情况下需迭代log₂n 次才能确定结果。常见的分治排序算法、快速排序,其时间复杂度O (n log n),所以A.错误。适用于线性遍历时间复杂度为O (log n),而二分查找无需遍历全部元素,所以B.错误。O (1)仅适用于哈希表等直接访问操作,二分查找需多次比较,做不到O (1),所以D.错误。故选C。
第 14 题 下面程序的时间复杂度为( )。
- int primesMAXP, num = 0;
- bool isPrimeMAXN = {false};
- void sieve() {
- for (int n = 2; n <= MAXN; n++) {
- if (!isPrimen)
- primesnum++ = n;
- for (int i = 0; i < num && n * primesi <= MAXN; i++) {
- isPrimen \* primes\[i] = true;
- if (n % primesi == 0)
- break;
- }
- }
- }
A. O (n ) B.O (n ×log n ) C. O (n ×log log n D. O (n²)
解析:答案A。本题的程序实现的是线性筛法(欧拉筛) ,用于高效生成素数,其时间复杂度为 O (n)(线性复杂度)。外层循环(第 4 行)遍历每个数 n(从 2 到 MAXN)。若 n 未被标记为非素数(!isPrimen),则将其加入素数表 primes(第 5-6 行)。内层循环(第 7-11 行)用当前素数 primesi 标记合数 n * primesi,并在 n 能被 primesi 整除时提前终止(第 9-10 行),确保每个合数仅被标记一次。每个合数仅被标记一次 :通过 if (n % primesi == 0) break 保证每个合数由其最小素因子标记,避免重复操作。虽然存在嵌套循环,但每个合数的标记操作均摊时间复杂度为 O(1),总操作次数与 MAXN 成线性关系。对比埃拉托斯特尼筛法(普通筛) :时间复杂度 O (n log log n),存在重复标记。所以A.正确。故选A。
第15题 下列选项中,哪个不可能是下图的广度优先遍历序列( )。
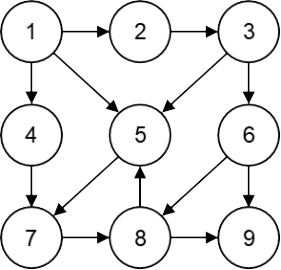
A. 1, 2, 4, 5, 3, 7, 6, 8, 9 B. 1, 2, 5, 4, 3, 7, 8, 6, 9
C. 1, 4, 5, 2, 7, 3, 8, 6, 9 D. 1, 5, 4, 2, 7, 3, 8, 6, 9
解析:答案B。根据广度优先搜索(BFS)的特性,遍历序列应按照层级顺序逐层访问节点,即从起始节点开始,先根节点入列,如有子节点(相邻节点),则所有子节点(相邻节点)压入队列,依此类推,直到最后一个节点。对A.:先压入①,再压入①的相邻节点②、④、⑤,接着压入②的相邻节点③(⑤已在队列)、④的相邻节点⑦、⑤的相邻节点无(⑦已在队列),压入③的相邻节点⑥(⑤已在队列)、⑦的相邻节点⑧,最后是⑥的相邻节点⑨。所以广度优先遍历序列1,2,4,5,3,7,6,8,9,所以A.正确。对B.:先压入①,再压入①的相邻节点无②、⑤、④,接着压入②的相邻节点③(⑤已在队列)、⑤的相邻节点⑦、④的相邻节点无(⑦已在队列),压入③的相邻节点⑥(⑤已在队列)、⑦的相邻节点⑧,最后是⑥的相邻节点⑨。所以广度优先遍历序列1,2,5,4,3,7,6,8,9,不可能出现1, 2, 5, 4, 3, 7, 8, 6, 9,8到达不了6,所以B.错误。对C.:先压入①,再压入①的相邻节点无④、⑤、②,接着压入④的相邻节点⑦、⑤的相邻节点无(⑦已在队列)、②的相邻节点③,压入⑦的相邻节点⑧、③的相邻节点⑥(⑤已在队列),最后是⑧的相邻节点⑨。所以广度优先遍历序列1,4,5,2,7,3,8,6,9,所以C.正确。对D.:先压入①,再压入①的相邻节点无⑤、④、②,接着压入⑤的相邻节点⑦、④的相邻节点无(⑦已在队列)、②的相邻节点③,压入⑦的相邻节点⑧、③的相邻节点⑥(⑤已在队列),最后是⑧的相邻节点⑨。所以广度优先遍历序列1,5,4,2,7,3,8,6,9,所以C.正确。故选B。
2 判断题(每题 2 分,共 20 分)
第1题 C++语言中,表达式 9 & 12 的结果类型为 int 、值为 8 。( )
解析:答案正确。9 & 12 = 0b00001001 & 0b00001100 = 0b00001000 = 8。故正确。
第2题 C++语言中,指针变量指向的内存地址不一定都能够合法访问。( )
解析:答案正确。在C++中,指针变量可以指向任意内存地址,但并非所有地址都能被程序合法访问。如:未初始化的指针 :指向随机内存地址,访问可能导致崩溃或数据损坏。已释放的内存(野指针) :访问delete或free后的内存属于未定义行为。空指针( NULL或 nullptr**)** :解引用空指针会直接引发段错误。越界访问 :如数组越界或缓冲区溢出,可能破坏其他数据。系统保护区域 :尝试访问操作系统保留地址(如0x00000000)会触发硬件异常。故正确。
第3题 对𝑛个元素的数组进行快速排序,最差情况的时间复杂度为𝑂(𝑛 log 𝑛)。( )
解析:答案错误。快速排序的最差时间复杂度为𝑂(𝑛²),而非𝑂(𝑛 log 𝑛)。故错误。
第4题 一般情况下, long long 类型占用的字节数比 float 类型多。( )
解析:答案正确。在大多数系统中,long long类型占用8字节,而float类型占用4字节。long long类型,固定为8字节(64位),用于存储大范围整数(如−2⁶³ ~ 2⁶³−1)。float类型
固定为4字节(32位),采用IEEE 754浮点标准存储,范围约为±3.4×10³⁸,但精度有限(约6~7位有效数字)。所以一般情况下long long类型占用的字节数比float类型多。故正确。
第5题 使用math.h或cmath头文件中的函数,表达式pow(10, 3)的结果的值为1000、类型为int。( )
解析:答案错误。在C++中,pow(10, 3) 的结果是10的3次幂,即1000(10³)。
pow()函数原型:double pow(double base, double exponent);
参数和返回值均为double类型,但整数参数(如10和3)会隐式转换为double计算,所以实际输出通常为1000.0,类型为double。故错误。
第6题 二叉排序树的中序遍历序列一定是有序的。( )
解析:答案正确。二叉排序树的定义:左子树的所有节点值 小于 当前节点值。右子树的所有节点值 大于 当前节点值。如下图所示。
中序遍历(左-根-右)的特性:先遍历左子树(所有值更小),再访问根节点,最后遍历右子树(所有值更大)。因此,中序遍历结果必然按升序排列。故正确。
第7题 无论哈希表采用何种方式解决冲突,只要管理的元素足够多,都无法避免冲突。( )
解析:答案正确。哈希函数将较大的输入空间映射到有限的输出空间(哈希表大小),根据鸽巢原理,当元素数量超过哈希表容量时,必然存在多个元素映射到同一位置,即冲突不可避免。即使采用链地址法或开放寻址法等策略,冲突仅被缓解或分散,无法从根本上消除。故正确。
第8题 在C++语言中,类的构造函数和析构函数均可以声明为虚函数。( )
解析:答案错误。在C++中,构造函数不能是虚函数,因为虚函数依赖虚函数表(vtable)实现,而虚函数表在对象构造期间才被初始化。调用构造函数时,对象尚未完全创建,此时无法通过虚函数机制动态绑定。语法上,C++直接禁止构造函数声明为virtual(编译报错)。析构函数可以(且有时必须)是虚函数,其作用是当基类指针指向派生类对象时,若基类析构函数非虚,则通过该指针删除对象会导致派生类析构未被调用,引发资源泄漏。故错误。
第9题 动态规划方法将原问题分解为一个或多个相似的子问题,因此必须使用递归实现。( )
解析:答案错误。动态规划(Dynamic Programming, DP)的核心思想是通过将原问题分解为重叠子问题 ,并存储子问题的解(记忆化)来避免重复计算,从而提高效率。关键点 :子问题必须具有重叠性 和最优子结构 ,但实现方式不限定于递归。动态规划的两种实现方式 :自顶向下(递归 + 记忆化) :使用递归分解问题,并通过哈希表或数组缓存子问题的解(即"记忆化搜索")。自底向上(迭代) :从最小子问题开始,通过迭代逐步构建更大问题的解(通常用数组或表格存储状态)。递归并非必需 。故错误。
第10题 如果将城市视作顶点,公路视作边,将城际公路网络抽象为简单图,可以满足城市间的车道级导航需求。( )
解析:答案错误。将城市抽象为顶点、公路抽象为边的简单图模型(无向、无权、无自环/重边)无法精确表达车道级导航所需的细节,这是简单图的局限性。车道级导航需包含车道数量、转向限制、实时交通状态 等属性,而简单图仅能表示城市间的连通性。车道级导航的数据需求 :高精度导航依赖动态权重 (如实时车速)、车道级拓扑 (如出口车道标识)和三维空间关系 (如高架桥分层),这些无法通过简单图的边和顶点直接建模。故错误。
3 编程题(每题 25 分,共 50 分)
3.1 编程题1
- 试题名称:线图
- 时间限制:1.0 s
- 内存限制:512.0 MB
3.1.1 题目描述
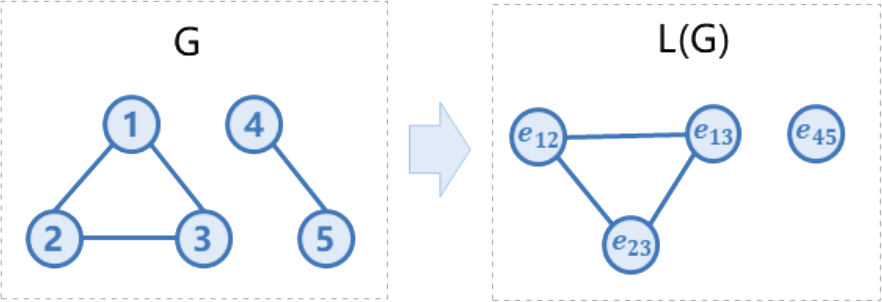
给定由𝑛个结点与𝑚条边构成的简单无向图𝐺,结点依次以1,2,...,𝑛编号。简单无向图意味着 中不包含重边与自环。𝐺的线图𝐿(𝐺)通过以下方式构建:
初始时线图𝐿(𝐺)为空。
对于无向图𝐺中的一条边,在线图𝐺中加入与之对应的一个结点。
对于无向图𝐺中两条不同的边(𝑢₁,𝑣₁),(𝑢₂,𝑣₂),若存在𝐺中的结点同时连接这两条边(即𝑢₁,𝑣₁之一与𝑢₂,𝑣₂之一相同),则在线图𝐿(𝐺)中加入一条无向边,连接(𝑢₁,𝑣₁),(𝑢₂,𝑣₂)在线图中对应的结点。
请你求出线图𝐿(𝐺)中所包含的无向边的数量。
3.1.2 输入格式
第一行,两个正整数𝑛,𝑚,分别表示无向图𝐺中的结点数与边数。
接下来𝑚行,每行两个正整数𝑢ᵢ ,𝑣ᵢ ,表示𝐺中连接𝑢ᵢ ,𝑣ᵢ的一条无向边。
3.1.3 输出格式
输出共一行,一个整数,表示线图𝐿(𝐺)中所包含的无向边的数量。
3.1.4 样例
3.1.4.1 输入样例1
- 5 4
- 1 2
- 2 3
- 3 1
- 4 5
3.1.4.2 输出样例1
- 3
3.1.4.3 输入样例2
- 5 10
- 1 2
- 1 3
- 1 4
- 1 5
- 2 3
- 2 4
- 2 5
- 3 4
- 3 5
- 4 5
3.1.4.4 输出样例2
- 30
3.1.4.5 样例解释
3.1.5 数据范围
对于60%的测试点,保证1≤𝑛≤500,1≤𝑚≤500。 对于所有测试点,保证1≤𝑛≤10⁵,1≤𝑚≤10⁵。
3.1.6 编写程序思路
分析:设计思路与原理:线图定义 :线图L(G) 的顶点对应原图G 的边。若原图G 中两条边共享一个公共顶点,则在线图L(G) 中对应的顶点之间连一条边。线图的边数等于原图中所有共享公共顶点的边对数。对于原图的每个顶点u,其邻接边的数量为edge(u),贡献的边对数为 。构建邻接表,记录每个顶点的邻接边。遍历每个顶点,计算其邻接边的组合数并累加。时间复杂度 :邻接表构建:O (m),组合数计算:O (n),总复杂度:O (n +m)。因为n ≤10⁵,m ≤10⁵,总复杂度在10⁵数量级,不会超时。完整参考程序代码如下:
。构建邻接表,记录每个顶点的邻接边。遍历每个顶点,计算其邻接边的组合数并累加。时间复杂度 :邻接表构建:O (m),组合数计算:O (n),总复杂度:O (n +m)。因为n ≤10⁵,m ≤10⁵,总复杂度在10⁵数量级,不会超时。完整参考程序代码如下:
cpp
#include <iostream>
using namespace std;
const int MaxN = 1e5+10; //顶点编号n≤10⁵
int n, m, edge[MaxN]; //顶点编号1~n,初始为0
int main() {
cin >> n >> m;
for (int i = 1; i <= m; ++i) { //输入m条边uᵢ,vᵢ
int u, v;
cin >> u >> v;
edge[u]++; //顶点计数
edge[v]++; //顶点计数
}
long long edge_count = 0; //防止大数溢出
for (int u = 1; u <= n; ++u)
edge_count += 1ll * edge[u] * (edge[u] - 1) / 2; //组合运算
cout << edge_count << endl;
return 0;
}3.2 编程题2
- 试题名称:调味平衡
- 时间限制:1.0 s
- 内存限制:512.0 MB
3.2.1 题目描述
小A准备了𝑛种食材用来制作料理,这些食材依次以1,2,...,𝑛编号,第i种食材的酸度为aᵢ,甜度为bᵢ。对于每种食材,小A可以选择将其放入料理,或者不放入料理。料理的酸度𝐴为放入食材的酸度之和,甜度𝐵为放入食材的甜度之和。如果料理的酸度与甜度相等,那么料理的调味是平衡的。 过于清淡的料理并不好吃,因此小A想在满足料理调味平衡的前提下,合理选择食材,最大化料理的酸度与甜度之和。你能帮他求出在调味平衡的前提下,料理酸度与甜度之和的最大值吗?
3.2.2 输入格式
第一行,一个正整数𝑛,表示食材种类数量。
接下来𝑛行,每行两个正整数aᵢ, bᵢ,表示食材的酸度与甜度。
3.2.3 输出格式
输出共一行,一个整数,表示在调味平衡的前提下,料理酸度与甜度之和的最大值。
3.2.4 样例
3.2.4.1 输入样例1
- 3
- 1 2
- 2 4
- 3 2
3.2.4.2 输出样例1
- 8
3.2.4.3 输入样例2
- 5
- 1 1
- 2 3
- 6 1
- 8 2
- 5 7
3.2.4.4 输出样例2
- 2
3.2.5 数据范围
对于40%的测试点,保证1≤𝑛≤10,1≤aᵢ, bᵢ≤10。
对于另外20%的测试点,保证1≤𝑛≤50,1≤aᵢ, bᵢ≤10。
对于所有测试点,保证1≤𝑛≤100,1≤aᵢ, bᵢ≤500。
3.2.6 编写程序思路
方法一:用vector(可变数组存放料理酸度与甜度, 不会vector也可用结构体struct)。需要选择若干食材,使得它们的总酸度等于总甜度(A = B),同时最大化A + B(即2A或2B)。
这是一个典型的动态规划问题,可以转化为背包问题的变种:我们需要跟踪酸度和甜度的差值(A - B),并记录对应的最大总和(A + B)。用动态规划设计,状态定义:dpd 表示酸度与甜度之差为 d 时的最大总和(A + B)。初始化:dp0 = 0(差值为0时总和为0),其他状态初始化为负无穷(表示不可达)。状态转移:对于每个食材,更新所有可能的差值 d:
如果选择该食材,新的差值为 d + (aᵢ - bᵢ),新的总和为 dpd + aᵢ + bᵢ。不选择则保持原状态。偏移量处理:由于差值可能为负,使用偏移量将差值映射到非负范围。复杂度优化,使用滚动数组或一维数组优化空间复杂度。差值范围限制在 -sum(aᵢ + bᵢ), sum(aᵢ + bᵢ) 内,避免无效计算。时间复杂度O(n*MAX_DIFF)=100*105*505*2≈10⁷,不会超时。完整参考程序代码如下:
cpp
#include <iostream>
#include <vector>
using namespace std;
const int MAX_DIFF = 105 * 505 * 2; //n*a*2,最大可能差值范围
const int OFFSET = MAX_DIFF / 2; //偏移量处理负值(中心点)
int main() {
ios::sync_with_stdio(false); //即取消缓冲区同步,cin、cout效率接近scanf、printf
cin.tie(nullptr); //解除cin和cout之间的绑定,进一步加快执行效率
int n;
cin >> n;
vector<pair<int, int >> items(n); //pair成对数据.first存酸度a、.second存甜度b
for (int i = 0; i < n; ++i) {
cin >> items[i].first >> items[i].second; //输入n个酸度、甜度对
}
vector<int> dp(MAX_DIFF + 1, -1000); //1≤aᵢ,bᵢ≤500。aᵢ-bᵢ≥-499
dp[OFFSET] = 0; // 初始状态:差值为0时和为0
for (const auto& item : items) {
int a = item.first, b = item.second;
int diff = a - b;
vector<int> new_dp = dp; //拷贝创建new_dp,dp的所有元素复制到new_dp
for (int j = 0; j <= MAX_DIFF; ++j) {
if (dp[j] != -1000) {
int new_j = j + diff;
if (new_j >= 0 && new_j <= MAX_DIFF) {
if (new_dp[new_j] < dp[j] + a + b) {
new_dp[new_j] = dp[j] + a + b;
}
}
}
}
dp = move(new_dp); //资源所有权的转移给dp,new_dp.size()=0
}
cout << max(0, dp[OFFSET]) << endl;
return 0;
}方法二:用一个动态规划算法,主要功能是处理输入数据并计算特定条件下的最大值。数组dpMAX_DIFF+1初始化为极小值(-16843010<-499),仅dpOFFSET初始化为0,作为动态规划的起点。核心算法:先读取n对整数(a,b),计算addt=a+b和subt=a-b,根据subt值的正负采用不同的遍历方向:subt≤0时正向遍历更新dp数组,subt>0时逆向遍历更新dp数组,通过max(dpj+subt, dpj+addt)实现状态转移,记录最大值,输出结果为最终输出dpOFFSET的值,即中心位置的计算结果。使用动态规划思想,通过状态转移方程更新数组值;采用双指针技巧处理不同方向的遍历需求。时间复杂度O (n *n *a*2)=100*105*505*2≈10⁷,不会超时。完整参考程序代码如下:
cpp
#include <iostream>
#include <cstring> //含memset()函数
using namespace std;
const int MAX_DIFF = 105 * 505 * 2; //n*a*2,最大可能差值范围
const int OFFSET = MAX_DIFF / 2; //偏移量处理负值(中心点)
int main() {
ios::sync_with_stdio(false); //即取消缓冲区同步,cin、cout效率接近scanf、printf
cin.tie(nullptr); //解除cin和cout之间的绑定,进一步加快执行效率
int n;
cin >> n;
int dp[MAX_DIFF + 1]; //1≤aᵢ,bᵢ≤500。aᵢ-bᵢ≥-499
memset(dp, -2, sizeof(dp)); //初始化为-16843010。0b11111110111111101111111011111110
dp[OFFSET] = 0; // 初始状态:差值为0时和为0
for (int i = 0; i < n; ++i) {
int a, b;
cin >> a >> b; //输入n个数据对
int addt = a + b, sunt = a - b; //求和及差
if (sunt <= 0) //小于等于0,正向遍历
for (int j = -sunt; j <= MAX_DIFF; ++j)
dp[j + sunt] = max(dp[j + sunt], dp[j] + addt);
else //否则大于0,逆向遍历
for (int j = MAX_DIFF - sunt - 1; j; j--)
dp[j + sunt] = max(dp[j + sunt], dp[j] + addt);
}
cout << max(0, dp[OFFSET]) << endl;
return 0;
}